Mars Global Surveyor
Mars Global Surveyor, également désignée par son sigle MGS, est une mission spatiale développée par le centre JPL de la NASA qui a étudié de 1997 à 2006 l'atmosphère et la surface de la planète Mars en circulant sur une orbite héliosynchrone autour de celle-ci. La sonde spatiale devait répondre aux nombreuses interrogations soulevées par les données collectées dans le cadre du programme Viking lancé 20 ans auparavant portant sur l'histoire de la planète, la structure de sa surface et de son atmosphère ainsi que sur les processus dynamiques encore à l’œuvre.

| Organisation |
|
|---|---|
| Constructeur |
|
| Domaine | Étude de la surface et de l'atmosphère martienne |
| Type de mission | Orbiteur martien |
| Statut | Mission achevée |
| Lancement | |
| Lanceur | Delta II-7925 |
| Fin de mission | |
| Identifiant COSPAR | 1996-062A |
| Site | mars.jpl.nasa.gov |
| Masse au lancement | 1 030 kg |
|---|---|
| Masse instruments | 75,6 kg |
| Ergols | Hydrazine, peroxyde d'azote |
| Masse ergols | 360,5 kg |
| Contrôle d'attitude | Stabilisé 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 660-980 watts |
| Altitude | 377 km |
|---|---|
| Inclinaison | 93° |
| MOC | Caméras |
|---|---|
| MOLA | Altimètre laser |
| TES | Spectromètre infrarouge |
| MAG/ER | Magnétomètre/Réflectomètre à électrons |

L'agence spatiale américaine lance la conception de Mars Global Surveyor en 1994 à la suite de l'échec de la mission martienne Mars Observer. MGS reprend les principaux objectifs de celle-ci, mais, afin de limiter son coût, la sonde spatiale réutilise les instruments et les équipements développés pour Mars Observer. Elle est construite et testée en un temps record puis lancée en . Pour se placer sur son orbite de travail autour de Mars, la sonde spatiale inaugure le recours à l'aérofreinage qui permet de réduire la quantité d'ergols transportée et donc d'abaisser les coûts. Le déploiement incomplet d'un panneau solaire rallonge la phase d'aérofreinage qui s'achève en , soit 15 mois après la date prévue. La phase de recueil des données scientifiques débute alors et se prolonge jusqu'en octobre 2006 établissant un nouveau record de longévité.
Les découvertes réalisées grâce à la mission et les images spectaculaires prises par la caméra contribuent à renouveler l'intérêt des scientifiques mais également du grand public pour la planète Mars. L'altimètre laser de MGS dresse la première carte topographique de la planète mettant en évidence les différences spectaculaires entre les hémisphères nord et sud. Le spectromètre infrarouge TES découvre des régions où abonde l'hématite grise qui pourrait signaler la présence d'eau dans le passé et qui, à ce titre, fera l'objet d'investigations poussées par les missions spatiales suivantes. Le magnétomètre détecte un magnétisme rémanent présent dans la croute de certaines régions qui constitue sans doute le vestige d'un champ magnétique qui s'est éteint il y a 4 milliards d'années. Enfin, la caméra MOC fournit des images haute définition qui démontrent la complexité des paysages martiens, permettent de découvrir de nombreuses formations originales comme les traînées noires, les ravines associées potentiellement à la présence d'eau dans un passé lointain ou non, et plus généralement contribuent à reconstituer l'histoire de la planète.
Contexte : le retour de la NASA sur Mars
Bilan du programme Viking
Les observations effectuées par les deux orbiteurs et les deux atterrisseurs du programme Viking lancés par la NASA en 1976 pour étudier Mars avaient démontré que l'histoire de cette planète était complexe sur les plans géologique et climatique et que le climat comme l'environnement continuaient à évoluer. Les sondes Viking avaient finalement soulevé autant de questions qu'elles en avaient résolues : quelle était l'origine et l'histoire des formations de surface découvertes depuis l'orbite et attribuées sans certitude à l'action d'anciens cours d'eau ou de lacs ? Comment la dichotomie manifeste entre hémisphère sud et nord s'expliquait-elle ? Quelle était la distribution des minéraux à sa surface et y trouvait-on des traces de la présence d'eau ? De quels matériaux étaient composées les calottes polaires et comment celles-ci évoluaient-elles ? Comment fonctionnait la circulation atmosphérique de Mars. Dès le début des années 1980, il était devenu clair pour les planétologues que, pour répondre à ces questions, la prochaine mission d'exploration de Mars devait être un orbiteur circulant sur une orbite héliosynchrone durant une année martienne complète et disposant d'une suite d'instruments permettant de recueillir des données à la fois sur l'atmosphère, la surface et la structure interne[2].
Échec de la mission Mars Observer
Il faut attendre dix-sept ans pour que soit lancée une mission martienne chargée de répondre aux questions soulevées par le programme Viking : Mars Observer est conçu initialement comme une mission à bas coût grâce au recours à une plateforme de satellite commercial et à une conception modulaire permettant une intégration simple des instruments scientifiques. Mais peu après le démarrage des développements qui intervient en 1984, les coûts s'envolent : le budget initial de 250 millions de dollars atteint finalement 850 millions de dollars (959 millions de dollars selon une autre source) en incluant le lanceur. Ce dérapage du budget est notamment dû aux modifications apportées par le JPL, gestionnaire du projet, qui a renoncé progressivement au concept de départ reposant sur la simplicité et le recours à des composants disponibles[3],[N 1]. Mars Observer est lancée le mais trois jours avant l’insertion sur son orbite martienne, le , le contact avec la sonde spatiale est définitivement perdu, sans doute à la suite d'une fuite des ergols ayant entraîné une perte du contrôle d'attitude[4].
| Mission | Date de lancement | Type | Agence spatiale | Résultat |
|---|---|---|---|---|
| Programme Viking | 1975 | 2 orbiteurs et 2 atterrisseurs | Succès Dernière mission scientifique réussie avant MGS | |
| Programme Phobos | 1988 | 2 orbiteurs et 2 atterrisseurs lunaires | Échec(1) | |
| Mars Observer | 1992 | Orbiteur | Échec | |
| Mars Global Surveyor | 1996 | Orbiteur | Succès | |
| Mars 96 | 1996 | 1 orbiteur et 2 atterrisseurs | Échec | |
| Mars Pathfinder | 1996 | Atterrisseur(2) | Succès | |
| Nozomi | 1998 | Orbiteur | Échec | |
| Mars Climate Orbiter | 1999 | Orbiteur | Échec | |
| Mars Polar Lander | 1999 | Atterrisseur | Échec | |
| (1)Phobos 2 a réussi à s'insérer en orbite mais est tombé en panne avant d'avoir rempli ses objectifs principaux (2)Mission essentiellement technologique et non scientifique | ||||
Révision de la stratégie de la NASA
Mars Observer était la sonde spatiale la plus coûteuse lancée jusque-là par la NASA. L'échec de cette mission entraîne une révision complète de la stratégie américaine d’exploration du Système solaire. L'agence décide de lancer désormais des sondes spatiales moins sophistiquées mais à budget réduit : l'objectif est de ne pas tout perdre en cas d’échec tout en permettant la réalisation d'un plus grand nombre de missions avec un cycle de développement raccourci. C’est le « better, faster, cheaper » (« mieux, plus vite, moins cher ») qui devient la devise du nouveau programme Discovery. Un programme d'exploration martien ambitieux est mis en place en appliquant ce nouveau dogme : à chaque conjonction favorable de Mars et de la Terre (environ tous les deux ans), la NASA prévoit d’envoyer à la fois une sonde spatiale de type orbiteur, qui doit effectuer ses observations depuis une orbite martienne, et une autre de type atterrisseur, chargée de se poser sur le sol martien pour y recueillir des données scientifiques. Les objectifs assignés initialement à la sonde Mars Observer perdue en vol, sont répartis entre les orbiteurs beaucoup plus légers du nouveau programme : des copies des instruments scientifiques développés pour Mars Observer seront donc embarqués sur ces nouvelles sondes[5].
Développement de Mars Global Surveyor
La NASA confie au JPL le soin de mener à bien le programme martien refondu baptisé Mars Surveyor en référence au programme Surveyor dont les atterrisseurs avaient joué le rôle d'éclaireur pour les missions du programme Apollo. En , l'agence spatiale demande au Congrès un budget de 77 millions de dollars pour lancer le développement des premières sondes spatiales. Mars Global Surveyor (que l'on peut traduire par « Inspecteur général de Mars »), en abrégé MGS, est le premier engin de la série. Son lancement est prévu en 1996. Il doit être suivi par des paires d'orbiteur/atterrisseur lancés tous les deux ans (1998...). Le budget annuel prévisionnel du programme est de 100 millions de dollars auxquels s'ajoutent 20 millions pour les opérations. Après une phase de sélection extrêmement courte de deux mois, le JPL annonce en qu'il confie la construction de la sonde spatiale à l'établissement de Denver (Colorado) de la société Lockheed Martin qui était déjà le constructeur de Mars Observer. La durée du développement de MGS (28 mois) est une des plus courtes du programme spatial américain. Pour limiter les coûts, la sonde spatiale embarque des instruments scientifiques et des équipements identiques à ceux développés pour Mars Observer. Ainsi la caméra MOC est construite en grande partie à partir de pièces détachées de rechange de l'instrument originel. Alors que son développement pour la première mission avait coûté 23,7 millions de dollars, la réalisation de sa copie pour MGS ne revient qu'à 4,5 millions de dollars. Les responsables de la mission choisissent d'utiliser l'aérofreinage pour l'insertion en orbite autour de Mars. Cette technique, mise en œuvre pour la première fois de manière non expérimentale, permet de réduire la masse des ergols emportés et donc finalement le coût, car la mise en orbite exige un lanceur moins puissant[6],[7].
Objectifs
Les progrès techniques réalisés depuis les missions martiennes précédentes et une orbite adaptée permettent d'espérer des images beaucoup plus précises de la surface de Mars. Par exemple, la connaissance du cratère Airy-0 s'améliore d'une mission à la suivante :
|

Mars Global Surveyor est une mission d'étude de Mars chargée de collecter des données sur l'ensemble de la planète depuis sa couche atmosphérique supérieure (l'ionosphère) jusqu'à sa structure interne[8].
La mission contribue à atteindre les quatre objectifs scientifiques du programme martien que la NASA s'est fixés à l'époque[8] :
- déterminer si la vie a pu apparaître sur Mars[9] ;
- définir les caractéristiques du climat martien[10] ;
- étudier la géologie de la planète[11] ;
- préparer les futures missions d'exploration avec équipage[12].
Pour contribuer à ces objectifs généraux, la mission doit[13] :
- caractériser les structures géologiques de surface et identifier les processus géologiques à l’œuvre ;
- déterminer la composition, la distribution et les caractéristiques physiques des minéraux, roches et glaces présents en surface ;
- déterminer la topographie globale de la planète, sa forme et son champ gravitationnel ;
- étudier la météorologie martienne et la structure thermique de son atmosphère ;
- étudier les interactions entre la surface de Mars et son atmosphère en observant les mouvements de retrait ou d'expansion des calottes polaires liés au cycle des saisons.
La mission de MGS ayant été prolongée à plusieurs reprises, plusieurs objectifs ont été ajoutés après le lancement[13] :
- poursuivre les observations météorologiques de manière à ne pas créer de discontinuité dans les relevés jusqu'à l'arrivée de la sonde spatiale Mars Reconnaissance Orbiter en ;
- prendre des photos des futurs sites d’atterrissage de Phoenix et de Mars Science Laboratory ;
- observer et analyser les sites intéressants sur le plan scientifique tels que les affleurements sédimentaires ;
- continuer à surveiller les changements en surface : phénomènes météorologiques et cycle des calottes polaires.
Mars Global Surveyor doit également assister les autres missions martiennes de la NASA en fournissant des données sur l'atmosphère aux orbiteurs de ce programme durant leurs opérations d'aérofreinage et en jouant le rôle de relais entre d'une part les atterrisseurs et rovers posés sur le sol de Mars et d'autre part la Terre[8].
Architecture de la mission
Orbite héliosynchrone
Les objectifs de la mission sont comparables à ceux des satellites d'observation de la Terre : aussi comme ceux-ci, MGS doit circuler sur une orbite héliosynchrone qui permet à la sonde spatiale de passer au-dessus de l'ensemble de la surface à la même heure solaire et donc dans des conditions d'éclairage identiques. L'heure de survol retenue (14 heures) résulte d'un compromis entre les exigences de la caméra MOC pour laquelle une heure tardive caractérisée par des ombres longues est préférable et celles du spectromètre TES qui obtient un meilleur rapport signal sur bruit lorsque le sol atteint sa température maximale vers 13 heures. L'orbite polaire figée a une périodicité de 117,65 minutes et survole la surface à une altitude comprise entre 368 et 438 km. À chaque orbite, la trace au sol se décale de 242 km au niveau de l'équateur. L'orbite quasi phasée boucle le survol de l'ensemble de la planète toutes les 88 orbites (en sept journées martiennes) en se décalant de 59 kilomètres vers l'est à chaque fin de phase[14].
Pointage des instruments, des antennes et des panneaux solaires
Pour pouvoir effectuer les observations, il est nécessaire que les instruments soient toujours pointés vers la surface de la planète. Tous les instruments sont co-alignés : ils sont disposés sur la face inférieure de la sonde spatiale tournée en permanence vers le sol (nadir). Mars Global Surveyor pivote lentement au cours de l'orbite pour maintenir l'axe des instruments perpendiculaire au sol, permettant ainsi des observations continues. Le dimensionnement des panneaux solaires est calculé de manière à fournir suffisamment d'énergie pour un fonctionnement simultané de tous les instruments de la sonde spatiale. Ils pivotent pour maintenir leur surface perpendiculaire à la direction du Soleil et optimiser la production d'électricité. L'antenne parabolique orientable est placée au sommet d'un mât, ce qui évite l'interception des signaux radio par le corps de la sonde spatiale. Ces dispositions permettent de maintenir l'antenne pointée vers la Terre en permanence et ainsi de transmettre l'important volume de données généré par la caméra à très haute résolution[14].
Recours à l'aérofreinage

L'insertion sur une orbite héliocentrique autour de Mars d'un engin spatial en provenance de la Terre nécessite qu'il ralentisse de manière importante. Pour cette raison, les ergols emportés par les orbiteurs martiens représentent une proportion particulièrement importante du poids total. Pour Mars Observer qui devait s'insérer sur une orbite analogue à celle de MGS, la masse des ergols est de 1 346 kg pour une masse totale de 2 573 kg. Pour limiter la pénalité de masse, la sonde spatiale américaine Magellan avait expérimenté avec succès en 1993, pour la première fois, la technique de l'aérofreinage : celle-ci lui avait permis de modifier son orbite autour de Vénus en permettant d'économiser une grande quantité d'ergols. Toutefois, cette manœuvre avait été réalisée à la fin de la mission scientifique principale pour limiter les conséquences de la perte de l'engin spatial. Avec MGS, la NASA fait de l’aérofreinage un prérequis à l’exécution de sa mission principale car la sonde spatiale n'emporte qu'une quantité restreinte d'ergols. Cette technique consiste, après un premier freinage destiné à s'insérer sur une orbite fortement elliptique (donc nécessitant moins d'ergols que l'insertion sur l'orbite finale), à abaisser le périgée de l'orbite de manière que la sonde spatiale traverse brièvement les couches supérieures de l'atmosphère. À chaque passage au périgée, la traînée générée par l'atmosphère réduit la vitesse de l'engin et diminue par conséquent l'altitude de l'apogée. Le freinage est d'autant plus efficace que la surface s'opposant à la progression dans l'atmosphère est grande (cette surface est constituée essentiellement par les panneaux solaires), que la finesse de l'engin spatial est faible (peut être modulée en modifiant l'angle des panneaux solaires) et que la densité de l'atmosphère est élevée (fonction de l'altitude). Le risque associé est une élévation de température excessive (l'énergie cinétique est dissipée sous forme de chaleur) ou un bris mécanique provoqué par les forces de traînée. En répétant jusqu'à des centaines de fois cette manœuvre, l'apogée peut être ramené à une faible distance de la planète. Le choix de cette technique permet à la sonde MGS d'emporter 360,5 kg d'ergols pour une masse totale de 1 030 kg, soit 35 % de la masse totale contre 52 % pour Mars Observer. L'aérofreinage à lui seul permet de réduire la vitesse de la sonde spatiale de 1 200 m/s. Le gain de masse obtenu directement (masse des ergols) et indirectement (masse des réservoirs) a permis de choisir un lanceur beaucoup moins puissant et donc moins coûteux[15],[16].
| Caractéristique | Mars Global Surveyor | Mars Observer |
|---|---|---|
| Charge utile | 76 kg (5 instruments) | 157 kg (7 instruments) |
| Plateforme | 591 kg | 879 kg |
| Ergols | 393 kg | 1 536 kg |
| Masse au lancement | 1 060 kg | 2 572 kg |
| Delta-v pour l'insertion en orbite | 989 m/s | 816 m/s |
| Delta-v pour la circularisation de l'orbite | 125 m/s | 1 367 m/s |
| Lanceur | Delta II-7925 55 millions $US | Titan III 500 millions $US |
Caractéristiques techniques de la sonde spatiale
Mars Global Surveyor, qui a approximativement la forme d'un parallélépipède de 3 mètres de haut avec une section de 1,2 × 1,2 mètre, pèse 1 030 kg au lancement dont 360,5 kg d'ergols et 75,6 kg d'instrumentation scientifique. La structure de la sonde spatiale est réalisée essentiellement en aluminium avec des panneaux en fibre de carbone. Les panneaux solaires, qui sont déployés dès que la sonde spatiale est dans l'espace, portent l'envergure à 12 mètres. L'antenne grand gain, située au bout d'un mât de 2 mètres et dont le diamètre est de 1,5 mètre, n'est déployée que plusieurs mois après l'arrivée sur Mars une fois les opérations d'aérofreinage achevées[17]. Les instruments scientifiques, sauf les capteurs du magnétomètre, sont tous placés sur la face de la sonde spatiale qui est maintenue en permanence pointée vers la surface de Mars, lorsque la phase de collecte des données scientifiques est entamée.

Plateforme

Propulsion et contrôle d'attitude
La propulsion principale, utilisée pour les corrections de trajectoire et l'insertion en orbite autour de Mars, est assurée par un moteur-fusée de 695 newtons de poussée. C'est un moteur à ergols liquides brûlant un mélange hypergolique d'hydrazine et de peroxyde d'azote. La propulsion secondaire comprend 4 grappes de 3 moteurs-fusées de 4,45 N de poussée qui brûlent de l'hydrazine. Ces propulseurs sont utilisés notamment pour maintenir l'axe de poussée de la propulsion principale dans la bonne direction durant l'insertion en orbite ainsi que pour les corrections d'orbite et le contrôle de l'orientation[18]. Mars Global Surveyor est stabilisé 3 axes. Pour maintenir son orientation, il utilise 4 roues de réactions (une par axe et une de rechange) qui sont, lorsque c'est nécessaire, désaturées à l'aide des propulseurs secondaires. L'orientation et les accélérations subies par la sonde spatiale sont déterminées à l'aide d'une centrale à inertie, d'un viseur d'étoiles, d'un capteur solaire deux axes et d'un senseur d'horizon martien[19].
Énergie
L'énergie électrique est fournie par deux ensembles de panneaux solaires constamment orientés vers le Soleil grâce à un système de cardan fournissant deux degrés de liberté. Chaque ensemble, disposé de part et d'autre du corps central, est constitué de deux panneaux ayant une superficie totale de 6 m2. La superficie des panneaux solaires a été choisie pour remplir la fonction d'aérofreinage. Elle excède les besoins en énergie : aussi chaque ensemble est constitué d'un panneau couvert de cellules solaires à base d'arséniure de gallium et d'un panneau utilisant des cellules solaires en silicium moins performantes. À chaque extrémité se trouve un volet de traînée qui est utilisé pour moduler l'aérofreinage. Les panneaux solaires produisent au niveau de l'orbite de Mars et en début de mission 980 watts lorsque la planète est au plus près du Soleil et 660 watts lorsque Mars est à l'apogée de son orbite héliocentrique. L'énergie est stockée dans deux batteries nickel-hydrogène d'une capacité unitaire de 20 ampères-heures[18].
Télécommunications
Les échanges radio avec la Terre sont réalisés en bande X mais la sonde spatiale emporte également à titre expérimental un émetteur fonctionnant en bande Ka. Une fois déployée, l'antenne parabolique grand gain de 1,5 mètre de diamètre est orientée en permanence vers la Terre grâce à un système de cardan fournissant deux degrés de liberté. En fonction de la distance relative de la Terre et de Mars, le débit est compris entre 10 et 85 kilobits/seconde. La sonde spatiale dispose également de quatre antennes faible gain (deux en émission et deux en réception) qui sont utilisées lorsque l'antenne grand gain n'est plus pointée vers la Terre. L'amplificateur est de 25 watts[20].
Ordinateur
L'ordinateur de bord, identique à celui de Mars Observer, comporte un microprocesseur Marconi 281 16 bits utilisant un jeu d'instructions de type MIL-STD-1750A avec une mémoire morte de 22 kiloMots (mot de 16 bits) et une mémoire vive de 128 kiloMots. Alors que Mars Pathfinder, lancé peu auparavant, dispose d'un ordinateur dix fois plus rapide, les responsables du projet préfèrent ce modèle âgé de dix ans car il permet de reprendre 84 % du logiciel utilisé pour contrôler la sonde spatiale. Par contre, MGS est la première sonde spatiale à remplacer la mémoire de masse de type bande magnétique par une mémoire flash qui présente l'avantage de fournir une très grande souplesse opérationnelle. Elle dispose de deux mémoires de ce type d'une capacité unitaire de 375 mégaoctets. La présence de deux mémoires optimise la transmission des données vers la Terre qui se fait alors que les instruments fonctionnent[19].
Instruments scientifiques



Mars Global Surveyor emporte cinq instruments tous développés initialement pour la mission Mars Observer [21].
Caméra MOC
La caméra MOC (Mars Orbiter Camera) utilise des détecteurs de type push-broom (capteur en peigne) et regroupe deux instruments distincts :
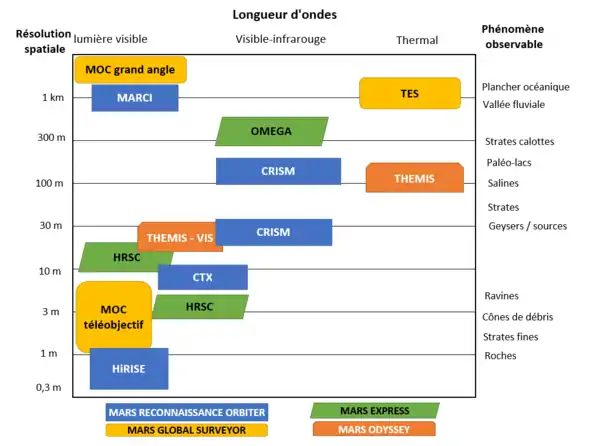
- le premier est une caméra dotée d'un puissant téléobjectif, représentant la plus grande partie du volume. L'optique est un télescope Ritchey-Chrétien caractérisé par une ouverture de 35 cm, une longueur focale de 3,5 mètres (f/10) et un angle de champ de 0,4°. Le détecteur comporte deux barrettes de CCD constituées de 2 048 éléments de 13 microns. L'ensemble atteint une résolution spatiale théorique de 1,41 mètre par pixel à une altitude d'observation de 380 km. Cette caméra est conçue pour obtenir des images détaillées des structures géologiques de la surface avec une résolution spatiale effective comprise entre 2,5 et 3 mètres.
- le deuxième est constitué de deux caméras fixées sur le cache optique du téléobjectif et dotées d'un objectif grand angle aux caractéristiques optiques très proches : l'une observe avec un filtre bleu (longueur d'onde 450–500 nm), l'autre avec un filtre rouge (575–625 nm). La longueur focale est de 11,4 et 11 millimètres (f/6,3 et f/6,4) et l'angle de champ de 140°. Le détecteur comporte deux barrettes de CCD constituées de 3 456 éléments de 7 microns. L'ensemble atteint, à une altitude de 380 km, une résolution spatiale théorique de 280 mètres par pixel au nadir du satellite et de 2 km lorsque la visée se fait sur le limbe de la planète. Les caméras grand angle fournissent des images globales de l'atmosphère et de la surface de Mars permettant d'identifier les principaux phénomènes atmosphériques.
La masse de la MOC est de 21 kg et sa consommation électrique moyenne en fonctionnement est de 8 watts[22].
Spectromètre infrarouge TES
Le spectromètre TES (Thermal Emission Spectrometer) analyse le rayonnement infrarouge émis par la surface. L'instrument comprend un spectromètre, un bolomètre mesurant la radiance et un canal mesurant la réflectance. Le spectromètre est un interféromètre de Michelson comportant six champs optiques avec une résolution spatiale de 3 km. Il mesure 143 bandes spectrales allant de 6,25 à 50 microns avec une résolution spectrale de 5 et 10. Le bolomètre effectue ses mesures dans les bandes spectrales comprises entre 4,5 et 100 microns avec une résolution spatiale de 3 km. La mesure de la réflectance se fait dans la bande spectrale comprise entre 0,3 et 2,7 microns. L'instrument est doté d'un miroir mobile qui permet de viser soit la surface de la planète au nadir de la sonde spatiale, soit le limbe, soit l'espace. TES utilise un microprocesseur 80C86 avec une mémoire vive de 0,6 mégaoctet. Les données collectées permettent notamment de déterminer les principales caractéristiques des roches et du sol : granularité, identification des minéraux. L'instrument est également utilisé pour déterminer la nature et la position des nuages et des poussières. La masse de TES est de 14,1 kg et sa consommation électrique en fonctionnement est de 13,2 watts[23].
Altimètre laser MOLA
L'altimètre laser MOLA (Mars Orbiter Laser Altimeter) mesure l'altitude de la surface de Mars à l'aide d'un laser Nd-YAG. Celui-ci est constitué de 44 rangées de 1 000 diodes qui émettent dix fois par seconde des impulsions de 7,5 nanosecondes. Les impulsions émises dans la longueur d'onde de 1 064 nanomètres sont réfléchies par le sol et la lumière en retour est collectée par un télescope Cassegrain de 0,5 mètre de diamètre avec une longueur focale de 0,74 mètre. La lumière réfléchie est filtrée pour éliminer les réflexions des rayons solaires sur le sol avant d'être traitée par un détecteur utilisant des photodiodes à avalanche au silicium. L'objectif est de produire une carte topographique à haute résolution (0,2 x 0,2°) avec une précision verticale d'au moins 30 mètres, des cartes plus ciblées avec une précision verticale de 2 mètres et de fournir une carte globale (0,2 x 0,2°) de la réflectivité de la surface de Mars avec une précision d'environ 20 %. La masse de l'instrument MOLA est de 25,9 kg et sa consommation électrique en fonctionnement est de 30,9 watts[24].
Magnétomètre MAG et réflectomètre à électrons ER
Le magnétomètre MAG et le réflectomètre à électrons (MGS Electron Reflectometer) doivent identifier les caractéristiques du champ magnétique de la planète ou ses rémanences en déterminant son intensité et sa direction. Le magnétomètre de type tri-axial fluxgate est dupliqué avec des capteurs installés aux extrémités des panneaux solaires. L'instrument permet de mesurer des champs magnétiques dont l'intensité est comprise entre 16 et 65 536 nT. Le réflectomètre à électrons utilise un capteur dont l'ouverture est de 360° x 14°. Le détecteur associé permet de mesurer à la fois l'angle d'arrivée des électrons avec une précision de 22,5 degrés et le niveau d'énergie selon 30 seuils compris entre 10 eV et 20 keV avec une précision (Largeur à mi-hauteur) ΔE/E de 0,25. La masse de l'ensemble MAG/ER est de 5,4 kg et sa consommation électrique en fonctionnement est de 4,6 watts[25],[26].
Oscillateur ultra stable
Un oscillateur ultra stable fournissant un signal radio particulièrement précis est utilisé pour mener des expériences reposant sur le système de communication de la sonde spatiale (RSI Radio Science Investigations). Il s'agit d'une part d'expériences d'occultation radio : lorsque l'atmosphère martienne s'interpose entre l'instrument et la Terre (peu avant le survol des pôles), les modifications affectant les ondes radio permettent de déterminer certaines propriétés de cette atmosphère. Le même système est utilisé pour mesurer les caractéristiques du champ gravitationnel martien ; les irrégularités affectant la structure interne de la planète sont déterminées en mesurant par effet Doppler les accélérations et les décélérations de la sonde spatiale qui découlent des variations locales du champ de gravité martien. L'instrument a une masse de 1,3 kg et consomme 1,3 watt lorsqu'il fonctionne[27].
- Instruments
 Spectromètre TES.
Spectromètre TES. Schéma du TES.
Schéma du TES. Altimètre laser MOLA.
Altimètre laser MOLA.
Relais radio

À l'époque de la conception de Mars Observer et de Mars Global Surveyor, il est prévu que plusieurs engins soient envoyés sur le sol de Mars : deux petits atterrisseurs et deux pénétrateurs emportés par la mission russe Mars 96 puis la mission américaine Mars Polar Lander. Pour réduire la masse du système de télécommunications de ces engins, ceux-ci sont conçus pour communiquer avec un orbiteur martien servant de relais avec la Terre. Ce procédé permet de limiter la taille et la complexité de l'antenne (une simple antenne hélicoïdale de 86 cm de long) ainsi que la masse et la consommation en énergie de l'émetteur radio. Le système émet en bande UHF avec un débit de 128 kilobits par seconde lorsque l'orbiteur se trouve à 1 300 km de distance, chutant à 8 kb/s à 5 000 km. MGS est le premier orbiteur chargé de jouer ce rôle de relais et il emporte un système de télécommunications dédié d'une masse totale de 10,5 kg incluant une antenne cylindrique pour communiquer avec les engins sur le sol martien. En pratique, MGS n'assurera pas le rôle de relais radio pour les missions prévues car celles-ci échouent et ne parviennent pas à déposer leurs engins sur le sol de Mars. Mais MGS jouera un rôle central, avec l'orbiteur 2001 Mars Odyssey équipé de manière similaire, dans la transmission des données scientifiques recueillies par les deux rovers MER de 2004 à 2006[28],[29].
Déroulement de la mission
Lancement et transit vers Mars (novembre 1996 - septembre 1997)


La fenêtre de lancement vers Mars s'ouvre le et se referme le 25 du même mois. Mars Global Surveyor est lancée le depuis la base de Cap Canaveral en Floride par une fusée Delta-7925 et est placée sur une orbite d'attente autour de la Terre. Le troisième étage de la fusée à propergol solide — de type Star 48B — est mis à feu pour insérer la sonde spatiale sur une orbite héliocentrique de 0,98 × 1,49 unités astronomiques devant tangenter Mars. Les panneaux solaires sont déployés une heure après le lancement mais les télémesures transmises par l'engin spatial montrent que l'une des deux ailes ne s'est pas verrouillée dans sa position finale. Durant le transit entre la Terre et Mars, trois corrections de trajectoire sont effectuées à l'aide de la propulsion principale. La première a lieu le . Elle modifie la vitesse de la sonde spatiale de 27 m/s pour corriger la direction de la sonde qui jusque-là ne pointait pas exactement vers Mars pour éviter que l'étage Star 48B pénètre dans l'atmosphère martienne et ne contamine la planète. Les deux corrections suivantes ont lieu le et le [30].
Insertion en orbite et aérofreinage (septembre 1997 - février 1999)
Le , après un transit d'environ 300 jours, Mars Global Surveyor arrive à proximité de Mars. La sonde spatiale allume son moteur principal durant 22 minutes, ce qui la ralentit de 990 m/s et lui permet de s'insérer sur une orbite fortement excentrique : le périapse est de 262 km au-dessus de l'hémisphère nord et l'apoapse est situé à 54 026 km au-dessus de l'hémisphère sud ; la période est de 45 heures. Les opérations d'aérofreinage peuvent alors débuter. Compte tenu de l'absence de verrouillage d'un des panneaux solaires, la NASA a décidé d'augmenter l'altitude du périgée prévue pour que la pression et la température soient moins importantes, lorsque la sonde spatiale est freinée par ses plongées dans l'atmosphère. La propulsion est brièvement utilisée pour réduire le périgée à 150 km. MGS effectue un premier passage dans les couches hautes de l'atmosphère martienne et les ingénieurs, après avoir vérifié que le comportement de la sonde spatiale est celui attendu, décident de poursuivre. À compter du le périgée est réduit à 110 km. À chaque passage dans l'atmosphère, la période orbitale est diminuée de 75 minutes. Mais la sonde spatiale subit une pression de 0,53 pascal qui fait fléchir l'aile portant les panneaux solaires de 13 degrés. Des images prises à l'aide du viseur d'étoiles de MGS semblent montrer que des petits morceaux de graphite se détachent de la structure des panneaux solaires. Phénomène aggravant, sous l'effet des tempêtes de poussière qui se déclenchent avec l'arrivée du printemps martien, la pression subie par la sonde spatiale lors de ses plongées passe à 0,9 pascal. Aussi, le , les ingénieurs du JPL décident d'arrêter les opérations d'aérofreinage en relevant le périgée pour analyser la situation avant que la sonde spatiale ne subisse des dommages irréversibles. Après avoir effectué des simulations à partir des données télémétriques transmises par MGS, les ingénieurs de la NASA en déduisent que le panneau solaire est sans doute plus endommagé que prévu et décident de reprendre l'aérofreinage en limitant à 0,2 pascal la pression que devra subir le panneau solaire endommagé[31].
Compte tenu de cette nouvelle contrainte, la phase d'aérofreinage qui devait, selon le scénario d'origine, s'étendre sur trois mois est rééchelonnée sur une durée beaucoup plus longue : elle est désormais divisée en trois phases qui s'achèvent en , soit 18 mois après l'insertion de la sonde spatiale sur son orbite martienne. Durant la première phase qui s'étend du à fin , la sonde spatiale plonge jusqu'à une altitude de 135 km et la période de l'orbite est ramenée grâce à l'aérofreinage de 35 heures à 11,64 heures. Bien que la sonde spatiale ne soit pas sur une orbite propice aux observations scientifiques, quelques images sont prises durant cette période pour identifier les sites d'atterrissage des prochaines sondes spatiales du programme de la NASA. Les premiers relevés altimétriques sont également effectués, notamment sur les calottes, Valles Marineris et dans l’hémisphère nord. Enfin, les plongées dans l'atmosphère fournissent des données intéressantes sur les variations de densité de l'atmosphère et les vents en haute altitude[32].
D'avril à , Mars Global Surveyor entame la deuxième phase. Les opérations d'aérofreinage sont arrêtées pour modifier le plan orbital et l'ajuster conformément aux objectifs scientifiques. Toutefois, du fait des modifications intervenues dans le déroulement de l'aérofreinage, le survol de la face éclairée se fera du sud vers le nord contrairement à ce qui était prévu[33]. Durant cette phase, de nombreuses données scientifiques sont collectées ; plus de 2 000 images[N 2], des millions de spectres électromagnétiques et des centaines d'occultations radio. À quatre reprises, la sonde spatiale passe à proximité de la lune de Mars, Phobos. Le , elle effectue des photos à haute définition alors qu'elle passe à une distance de 1 080 km de celle-ci. Des images sont prises des sites d'atterrissage des sondes Viking et Mars Pathfinder. L'altimètre MOLA révèle que la calotte polaire se situe dans une dépression profonde de 5 km et s'élève à 3 km au-dessus des terrains avoisinants mais qu'elle a sans doute été beaucoup plus étendue par le passé. Fin , les opérations d'aérofreinage reprennent. Durant cette troisième et dernière phase, la caméra n'est pas utilisée mais le magnétomètre collecte des données qui montrent que les anomalies magnétiques sont concentrées dans de très vieux terrains de l'hémisphère sud et que leur origine est donc très ancienne. Le , une dernière manœuvre avec un delta-v de 62 m/s achève la phase de circularisation de l'orbite en relevant le périgée à une altitude de 377 km. Après avoir bouclé 1 284 orbites, dont 891 comportaient une plongée dans l'atmosphère martienne, la sonde spatiale se trouve sur l'orbite de travail visée[34].
Les différentes configurations de Mars Global Surveyor :
|

Opérations scientifiques (mars 1999 - octobre 2006)


Les opérations de cartographie débutent le et sont programmées pour durer une année martienne complète, c'est-à-dire l'équivalent de deux années terrestres. Au-delà de cette date, l'orbiteur doit être utilisé principalement pour servir de relais de télécommunications entre, d'une part, les atterrisseurs et les rovers posés sur le sol martien et, d'autre part, la Terre. Le , la NASA produit une première carte topographique de la surface de Mars réalisée à partir de 27 millions de mesures de l'altimètre MOLA avec une résolution de 60 km. La mission primaire de MGS s'achève le . La perte de Mars Climate Orbiter, qui devait rejoindre l'orbite de Mars en septembre, prive l'agence spatiale américaine d'une solution de remplacement. La NASA décide d'une première extension de la mission de MGS jusqu'en . Le , l'oscillateur de l'altimètre tombe en panne. MOLA, désormais hors service, a effectué 640 millions de mesures qui permettent de disposer d'une carte topographique avec une résolution de 300 m × 3 000 m[35].
Une deuxième prolongation de mission est entérinée jusqu'à fin 2004, puis une troisième jusqu'à fin 2006 en partie à la demande du planétologue responsable scientifique et concepteur de la caméra MOC. Pour cette dernière extension, le budget annuel alloué aux opérations est réduit de 20 à 7,5 millions de dollars. Les ingénieurs mettent au point à cette époque une technique baptisée CPROTO (Compensated Pitch and ROll Targeted Observation) qui, en synchronisant plus précisément la caméra (par une lente rotation de la sonde spatiale) avec le déplacement de la sonde sur son orbite, permet de faire passer la résolution dans le sens nord sud de 4–5 mètres à 1,5 mètre[15]. Cette technique est utilisée notamment pour photographier en 2004 les traces de roues du rover Spirit et retrouver les traces de l'atterrissage du rover Opportunity. Le , MGS, qui tourne autour de Mars depuis huit ans, bat le record d'endurance de l'atterrisseur Viking 1[36].
Fin de mission (novembre 2006)
En 2006, Mars Global Surveyor, qui se trouve en orbite autour de Mars depuis dix ans – soit bien plus longtemps que la durée de vie prévue à sa conception (cinq ans[37]) –, commence à montrer des signes de vieillissement. En juillet puis en août, l'ordinateur principal et celui de secours tombent temporairement en panne. Néanmoins, la sonde spatiale dispose de suffisamment d'ergols[N 3] pour continuer à fonctionner jusqu'au milieu des années 2010 et la NASA décide en novembre de prolonger sa mission pour la quatrième fois. Le , les opérateurs au sol envoient une instruction de routine pour modifier l'orientation des panneaux solaires afin de réduire leur échauffement. Alors que la sonde spatiale devait reprendre contact deux heures plus tard, aucun signal n'est reçu sur Terre. Dans les jours qui suivent, toutes les tentatives de reprise de contact échouent. La caméra de la sonde spatiale MRO, récemment arrivée sur son orbite martienne, est utilisée pour tenter de prendre une photo de MGS afin de pouvoir réaliser un diagnostic visuel. Des instructions sont envoyées en aveugle à MGS pour que l'orbiteur fasse passer ses communications par le rover Opportunity qui arpente le sol martien. Mais toutes ces tentatives de diagnostic et de dépannage échouent et la NASA officialise, le , la perte de Mars Global Surveyor[38].
La commission d'enquête interne désignée par la NASA pour identifier l'origine de la perte publie ses conclusions en . Elle retrace les événements qui ont suivi l'envoi des commandes à la sonde spatiale par les opérateurs le . À la réception de celles-ci, la sonde spatiale a tenté de modifier l'orientation de ses panneaux solaires au-delà de la butée qui limite ces mouvements. L'ordinateur de bord, en détectant ces tentatives, a basculé en mode survie. L'entrée dans ce mode a déclenché, de manière normale, une modification de l'orientation de l'engin spatial mais sa nouvelle position a entraîné un échauffement trop important de l'une des deux batteries exposées directement au Soleil. L'ordinateur de bord en a déduit de manière erronée que cette surchauffe était due à une surcharge électrique et a interrompu le chargement de la batterie. Bien que la seconde batterie ait continué à se charger normalement, elle ne permettait pas de répondre aux besoins du bord et des instruments : l'énergie disponible s'est épuisée au bout d'environ douze heures, entraînant la perte de la sonde spatiale. L'origine de ces dysfonctionnements se trouve dans la modification involontaire par les opérateurs, deux mois auparavant, de deux paramètres de fonctionnement du logiciel embarqué. La modification du premier paramètre est à l'origine des mouvements anormaux des panneaux solaires, tandis que le deuxième paramètre a empêché la sonde spatiale de pointer son antenne parabolique vers la Terre pour transmettre les éléments qui auraient permis d'effectuer un diagnostic et d'intervenir à temps[39].
La relève : Mars Reconnaissance Orbiter
La sonde spatiale de la NASA Mars Reconnaissance Orbiter (MRO) se place en orbite autour de Mars le et, après une phase consacrée à l'aérofreinage, entame le recueil de données scientifiques à compter de septembre de la même année[40]. MRO poursuit le recueil des données effectué par MGS. Sa caméra HiRISE a une résolution spatiale de 0,3 à 0,6 mètre, six fois meilleure que la caméra MOC, principal instrument de MGS[41]. Son système de télécommunications permet un débit de 6 mégabits par seconde, soit 10 fois celui de son prédécesseur[42].
Résultats
Mars Global Surveyor est la première mission à revenir étudier la planète Mars depuis les sondes spatiales du programme Viking lancées vingt ans auparavant. Au cours de son séjour, la sonde spatiale a collecté et transmis environ 5 térabits de données et plus de 244 000 images. Limitée par le débit de son système de télécommunications 1 000 fois plus faible que le volume de données généré par sa caméra MOC, MGS a néanmoins transmis 97 000 images à haute définition couvrant 5,2 % de la surface de Mars. Elle a entièrement rempli ses objectifs scientifiques pour un coût total évalué à 377 millions de dollars, ce qui en a fait, au vu des résultats scientifiques produits, une des missions les plus rentables de la NASA[43].
Carte topographique et champ gravitationnel
L'altimètre MOLA a permis de dresser une carte topographique de Mars exceptionnellement précise et spectaculaire qui sert toujours de référence début 2016. La caractéristique la plus frappante de la planète est la dichotomie entre un hémisphère sud constitué de terrains élevés parsemés de cratères et âgés (Noachien) et l'hémisphère nord recouvert de plaines situées à une altitude inférieure de 3 à 6 km, pratiquement dépourvues de relief apparent et formées de sols plus jeunes et présentant peu de cratères visibles. Mars est un ellipsoïde légèrement aplati (20 km) du fait de la rotation de la planète. Le pôle nord est environ 6 km plus bas que le pôle sud ce qui entraîne un décalage du centre de masse de la planète par rapport au centre de l'ellipsoïde d'environ 3 km sur l'axe reliant les pôles. Le centre de masse est également décalé latéralement d'environ 1,4 km à cause du renflement de Tharsis. L'écart entre le point le plus bas de Mars situé dans le grand bassin d'impact d'Hellas Planitia et le sommet du volcan géant Olympus Mons atteint 30 km dépassant largement le différentiel de 20 km trouvé sur Terre[44]. L'étude du champ gravitationnel martien, déduit des accélérations de MGS mesurées par effet Doppler sur le signal radio, a confirmé la dichotomie entre l'hémisphère sud et l'hémisphère nord de la planète : au sud, la croute est épaisse avec peu d'anomalies, tandis qu'au nord, elle s'amincit et comporte de nombreuses anomalies. Les anomalies les plus notables se trouvent au niveau des volcans du dôme de Tharsis et de Valles Marineris. Dans l'hémisphère nord, certaines anomalies n'ont pas de correspondance topographique et pourraient correspondre à des bassins d'impact comblés par des dépôts volcaniques ou des sédiments[45],.

Champ magnétique de Mars
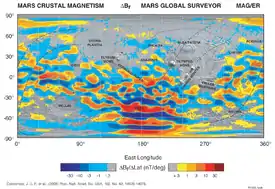
La première découverte attribuable à Mars Global Surveyor est réalisée par son magnétomètre et réflectomètre à électrons MAG/ER. Alors qu'aucune magnétosphère, manifestation habituelle d'un champ magnétique, n'avait été identifiée par les sondes spatiales précédentes, l'instrument permet de découvrir que Mars dispose d'un tel champ dont l'intensité atteint 1,5 µT à 100 km d'altitude. Ce champ magnétique n'a pas la structure dipolaire qui résulterait de l'effet dynamo produit par les mouvements d'un noyau liquide au cœur de la planète comme c'est le cas pour la Terre. Il résulte d'un magnétisme rémanent[46], jusqu'à trente fois supérieur à celui de l'écorce terrestre[47] qui prend son origine dans la croûte (qualifié de champ crustal) de certaines régions géologiquement anciennes de l'hémisphère sud[48], et notamment dans la région de Terra Cimmeria et Terra Sirenum[49]. Durant les neuf ans de sa mission, la sonde mesure les paramètres magnétiques au-dessus de la surface martienne. Le MGS/MAG recueille des données vectorielles depuis une altitude typiquement de 400 km, s'approchant parfois à 90 km de la surface, et MGS/ER (MGS Electron Reflectometer) mesure le magnétisme total depuis une altitude de 185 km en moyenne. Malgré la durée des relevés effectués par MGS/ER, la cartographie réalisée par MGS reste incomplète[50]. Les anomalies magnétiques mesurées par MGS sont structurées en bandes parallèles (voir schéma ci-contre). L'absence de champ crustal au-dessus des bassins d'impacts de l'hémisphère sud tels qu'Hellas et Argyre est généralement interprétée comme l'indication que Mars ne possédait plus de champ magnétique global lors de ces impacts, bien qu'il soit également possible que le refroidissement des matériaux sur le lieu de l'impact ait été trop rapide pour permettre l'alignement de leur aimantation éventuelle sur le champ magnétique global[51]. L'interprétation courante à l'époque de la publication de ces résultats est que la planète Mars disposait à sa création d'un champ magnétique créé par un noyau liquide mais que le champ avait cessé d'exister au bout de 300 à 500 millions d'années au moment de la formation de ces bassins d'impact, soit il y a environ 4 milliards d'années[52].
Détection de l'hématite
La découverte la plus importante effectuée grâce aux données du spectromètre infrarouge TES est la présence d’hématite grise sur deux sites : dans la région de Terra Meridiani, près de l'équateur martien à 0° de longitude, et dans l'Aram Chaos, près de Valles Marineris. Ces grains cristallisés d'oxyde de fer, qui se forment en milieu aqueux ou par altération de terrains par le passage de l'eau, ont soulevé un grand intérêt scientifique car ils constituent un indice de la présence d’eau liquide dans un passé lointain[53],[54]. Le rover Opportunity sera envoyé dans une région baptisée Meridiani Planum, elle-même située dans la région de Terra Meridiani, pour étudier les hématites détectées par MGS[55].
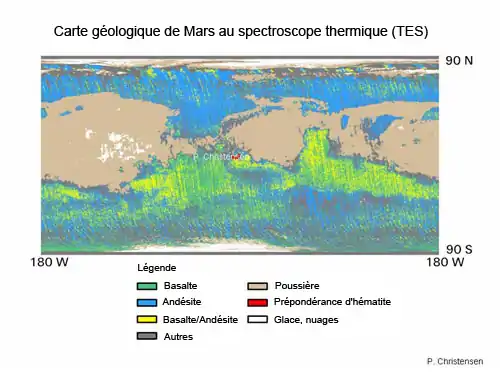
Un sol de nature volcanique

Les données collectées par le spectromètre infrarouge TES montrent que la surface de Mars comporte essentiellement deux grandes catégories de terrain. Les basaltes, roches volcaniques à faible teneur de silice, produites par des coulées de laves très fluides dominent sur les hauts plateaux de l'hémisphère sud, en particulier dans la région de Syrtis Major, Terra Cimmeria et Noachis Terra. Dans l'hémisphère nord et plus particulièrement à Acidalia Planitia, dans le nord-ouest de Syrtis Major et dans les plaines de Vastitas Borealis, la roche dominante est l'andésite, également volcanique mais dont la teneur en silice est plus élevée et qui est formée par des laves moins fluides[52].
Atmosphère de Mars
Les prolongations successives de la mission ont permis d'étudier de manière détaillée les changements climatiques liés au cycle des saisons. L'altimètre MOLA a mesuré les variations d'épaisseur des calottes polaires dues à la sublimation, au transport et au dépôt de l'eau et du dioxyde de carbone sous l'effet des variations de température. Aux latitudes supérieures à 80°, l'épaisseur de la calotte régresse de plusieurs mètres. La masse échangée entre la surface et l'atmosphère au gré des saisons représente une proportion remarquable de 50 milliardièmes de la masse totale de la planète et son impact sur le champ gravitationnel a pu être mesuré[56]. MGS a observé 10 500 tempêtes de poussière locales au cours des 4,8 années martiennes (-). Celles-ci se produisent tout au long de l'année avec une concentration plus importante lorsque la longitude solaire (Ls) de Mars est comprise entre 130° et 340°. Le phénomène mineur des tourbillons de poussière dont MGS a observé 12 000 occurrences, ne semble pas corrélé aux tempêtes de poussière. D'une année sur l'autre, les événements météorologiques remarquables (fortes tempêtes de poussière, nuages étendus) se répètent aux mêmes périodes (Ls ± 7.5°). Seules les tempêtes qui touchent de grandes régions ou toute la planète semblent imprévisibles. Mais on peut s'attendre chaque année martienne à ce que l'ensemble de l'atmosphère soit empoussiérée lorsque Ls est compris entre 210° et 240°. MGS a observé durant son séjour une seule tempête de poussière planétaire. Celle-ci a débuté le dans Hellas Planitia. Le front de la tempête au plus fort progressait à la vitesse de 30 m/s. Une augmentation de la température de l'atmosphère de 30 à 40 °C a été mesurée par le spectromètre TES et des changements notables ont été constatés au niveau des calottes polaires du fait de ces variations de température. Le , au pic de la tempête, la surface de la planète est devenue invisible hormis quelques sommets émergeant des nuages de poussière. Ses effets ne se sont complètement dissipés que plusieurs mois après son commencement[57],[58].
Détermination de la fréquence des impacts météoriques
Début 2006, les concepteurs de la caméra MOC se rendent compte que les images prises avec l'objectif grand angle de leur instrument pourraient être utilisées pour localiser les cratères d'impact apparus depuis l'arrivée de MGS. Des photos des Amazonis, Tharsis et Arabia Terra sont prises entre janvier et et sont comparées à des images réalisées durant la campagne de relevé topographique de . 19 nouvelles taches noires sont identifiées correspondant à autant d'impacts intervenus au cours des 7 années écoulées. Les nouveaux cratères sont de petite taille, de 2 mètres à quelques dizaines de mètres. Les observations s'accordent bien avec les modèles utilisés pour déterminer l'âge des terrains à partir de la densité et la taille des cratères d'impact[59].
Lunes de Mars
Lors des survols de la lune Phobos réalisés au cours de la première année, MGS mesure la température à surface avec le spectromètre infrarouge TES et réalise des gros plans avec la caméra MOC. Ces mesures permettent d'estimer que la surface de ce satellite est composée de débris pulvérulents sur une épaisseur d'au moins un mètre, résultat de millions d'années de bombardements météoritiques. La température passe de quelques degrés en dessous du zéro à −112 °C durant le cycle jour/nuit qui dure 7 heures[60].
Formations de surface
À l'issue de la mission primaire de Mars Global Surveyor (1997-2001), les principales découvertes réalisées à l'aide des photos prises par la caméra MOC et leur interprétation de l'époque ont été synthétisées dans un article publié par le concepteur de la caméra et planétologue Michael Malin assisté de K. Edgett[61] :
- la planète comporte une croûte qui est, contrairement à la Lune par exemple, composée de plusieurs strates sur une épaisseur pouvant atteindre 10 km ou plus. Pour produire ces strates, d'importantes quantités de matériaux ont été météorisés, transportés, puis déposés[62] ;
- Strates
 Strates dans un vieux cratère d'Arabia. Ces strates pourraient être d'origine volcanique, formées par le vent ou constituées par des dépôts lacustres. Les cratères sur la gauche sont des cratères à piédestal.
Strates dans un vieux cratère d'Arabia. Ces strates pourraient être d'origine volcanique, formées par le vent ou constituées par des dépôts lacustres. Les cratères sur la gauche sont des cratères à piédestal. Strates dans un cratère situé dans le bassin du cratère de Schiaparelli. Image prise dans le quadrangle de Sinus Sabaeus.
Strates dans un cratère situé dans le bassin du cratère de Schiaparelli. Image prise dans le quadrangle de Sinus Sabaeus. Buttes et strates dans le quadrangle d'Aeolis.
Buttes et strates dans le quadrangle d'Aeolis.
- l'hémisphère nord est probablement aussi cratérisé que l'hémisphère sud mais les cratères sont pour la plupart enfouis[63] ;
- beaucoup de structures géologiques apparentes, tels que les cratères d'impact, étaient autrefois enfouis mais ont été exhumés récemment[63] ;
- Formations enfouies puis exhumées
 Cratère enfoui puis exhumé. Image prise dans le quadrangle de Noachis.
Cratère enfoui puis exhumé. Image prise dans le quadrangle de Noachis. Ces coulées de lave étaient autrefois enfouies et ont été par la suite exhumées.
Ces coulées de lave étaient autrefois enfouies et ont été par la suite exhumées. Ce cratère autrefois enfoui a été exhumé par l'érosion. L'image est prise dans le quadrangle d'Ismenius Lacus.
Ce cratère autrefois enfoui a été exhumé par l'érosion. L'image est prise dans le quadrangle d'Ismenius Lacus. Le sol de l'hémisphère semble lisse parce que les cratères qui le parsèment ont été enfouis. Ici on voit une série de cratères partiellement exhumés. Image prise dans le quadrangle de Cebrenia.
Le sol de l'hémisphère semble lisse parce que les cratères qui le parsèment ont été enfouis. Ici on voit une série de cratères partiellement exhumés. Image prise dans le quadrangle de Cebrenia.
- des centaines de ravines ont été découvertes. Elles pourraient avoir été formées par la circulation d'eau liquide. Certaines de ces formations sont récentes[64],[65],[66],[67] ;
- Ravines
 Groupe de ravines situées sur le flanc nord du cratère situé lui-même à l'ouest du cratère Newton (41,304 7° latitude sud, 192,89° longitude est). L'image est prise dans le quadrangle de Phaethontis.
Groupe de ravines situées sur le flanc nord du cratère situé lui-même à l'ouest du cratère Newton (41,304 7° latitude sud, 192,89° longitude est). L'image est prise dans le quadrangle de Phaethontis. Ravines dans le cratère du quadrangle d'Eridania au nord du cratère Kepler. Des formations qui pourraient être les restes d'un ancien glacier sont apparentes. À droite, la formation ressemble à une langue glaciaire.
Ravines dans le cratère du quadrangle d'Eridania au nord du cratère Kepler. Des formations qui pourraient être les restes d'un ancien glacier sont apparentes. À droite, la formation ressemble à une langue glaciaire.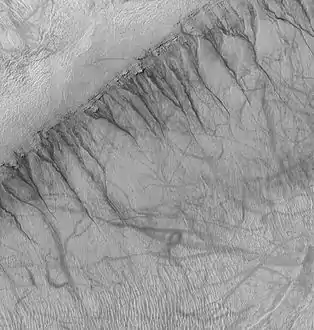 Ravines sur le flanc du cratère Kaiser. Les ravines se situent généralement sur un seul des flancs d'un cratère.
Ravines sur le flanc du cratère Kaiser. Les ravines se situent généralement sur un seul des flancs d'un cratère. Image en couleurs des ravines sur le flanc du Gorgonum Chaos. La photo est prise dans le quadrangle de Phaethontis.
Image en couleurs des ravines sur le flanc du Gorgonum Chaos. La photo est prise dans le quadrangle de Phaethontis.
- comme sur Terre, le socle rocheux de la surface de Mars est recouvert presque partout de couches de matériaux sauf dans les zones particulièrement pentues. Ce manteau est parfois lisse, parfois parsemé de cavités. Certains pensent que ces cavités ont été créées par de la glace d'eau qui s'échappe par sublimation[68] ;
- Manteau et cavités
 Gros plan sur la surface de Phaethontis. Les cavités visibles pourraient avoir été formées par la sublimation de glace d'eau.
Gros plan sur la surface de Phaethontis. Les cavités visibles pourraient avoir été formées par la sublimation de glace d'eau. Le manteau recouvre presque toute la zone. On peut noter l'absence d'éboulis le long de la falaise. La zone où s'achève le manteau est encerclée. Photo prise dans le quadrangle d'Ismenius Lacus.
Le manteau recouvre presque toute la zone. On peut noter l'absence d'éboulis le long de la falaise. La zone où s'achève le manteau est encerclée. Photo prise dans le quadrangle d'Ismenius Lacus. Matériau de manteau.
Matériau de manteau. Falaise dans le quadrangle d'Ismenius Lacus avec manteau recouvrant sa surface.
Falaise dans le quadrangle d'Ismenius Lacus avec manteau recouvrant sa surface.
- certaines traînées noires sont créées par des tourbillons de poussière. Les traces laissées par ces tourbillons changent rapidement, certaines en l'espace d'un mois[69] ;
- Tourbillons de poussière.
 Petites et grandes traces laissées par des tourbillons de poussière géants dans le quadrangle d'Eridania.
Petites et grandes traces laissées par des tourbillons de poussière géants dans le quadrangle d'Eridania. Traces de tourbillons de poussière dans le cratère Kepler, qui se trouve dans le quadrangle d'Eridania.
Traces de tourbillons de poussière dans le cratère Kepler, qui se trouve dans le quadrangle d'Eridania. Tourbillons de poussière.
Tourbillons de poussière. Tourbillons de poussière en action, avec leurs ombres, à droite. Image prise dans le quadrangle de Cebrenia.
Tourbillons de poussière en action, avec leurs ombres, à droite. Image prise dans le quadrangle de Cebrenia.
- la calotte résiduelle australe ressemble à du gruyère. Les trous ont généralement quelques mètres de profondeur. Ils semblent devenir plus profonds chaque année, ce qui semble impliquer que la région ou l'hémisphère sud se réchauffe[70]. Mais cette hypothèse d'un changement climatique n'est pas confirmée par les observations effectuées à l'aide des autres instruments ;
- Calottes polaires
 Changements au pôle sud entre 1999 et 2001 : les cavités se sont agrandies durant les deux années écoulées entre les deux prises d'image.
Changements au pôle sud entre 1999 et 2001 : les cavités se sont agrandies durant les deux années écoulées entre les deux prises d'image. Terrain en forme de gruyère. La plus grande des mesas mesure 4 mètres de haut.
Terrain en forme de gruyère. La plus grande des mesas mesure 4 mètres de haut. Strates dans un terrain en forme de gruyère : une couche supérieure brillante et une couche inférieure plus sombre sont visibles.
Strates dans un terrain en forme de gruyère : une couche supérieure brillante et une couche inférieure plus sombre sont visibles.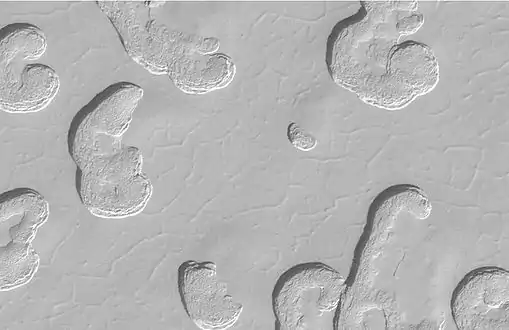 Gros plan sur le terrain en forme de gruyère. Des formes polygonales dues à des dépressions peu profondes sont visibles.
Gros plan sur le terrain en forme de gruyère. Des formes polygonales dues à des dépressions peu profondes sont visibles.
- le spectromètre infrarouge a étudié la composition minéralogique et l'atmosphère de la planète[71],[72],[73]. TES a permis de calculer que le climat de la planète s'était refroidi depuis que les sondes Viking avaient effectué leurs observations 20 ans auparavant[74],[75] ;
- les mesures effectuées montrent également que pratiquement toute la surface de Mars est recouverte par un sol d'origine volcanique ;
- Volcans
 Ceraunius Tholus, un des nombreux volcans de Mars.
Ceraunius Tholus, un des nombreux volcans de Mars. Coulées de lave dans le quadrangle de Tharsis.
Coulées de lave dans le quadrangle de Tharsis.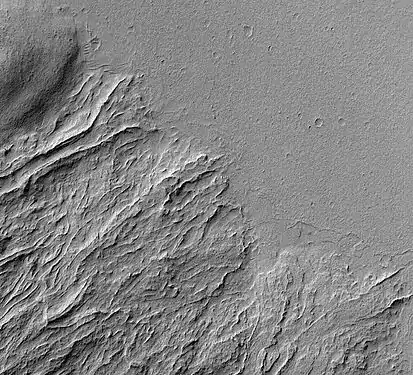 Coulées de lave récentes et anciennes à la base d'Olympus Mons. La plaine correspond à la coulée de lave récente. L'ancienne coulée comporte des canaux bordés de falaises. De telles formations sont fréquentes sur Mars.
Coulées de lave récentes et anciennes à la base d'Olympus Mons. La plaine correspond à la coulée de lave récente. L'ancienne coulée comporte des canaux bordés de falaises. De telles formations sont fréquentes sur Mars. Petit volcan dans le quadrangle de Phoenicis Lacus. L'image couvre une distance de 1,9 km.
Petit volcan dans le quadrangle de Phoenicis Lacus. L'image couvre une distance de 1,9 km.
- certaines zones comportent des centaines de rochers de la taille d'une maison. Leur existence implique que certains matériaux de la surface de Mars sont suffisamment tassés pour rester cohésifs même lorsqu'ils ont dévalé une pente. La plupart de ces matériaux apparaissent dans des régions volcaniques, aussi est-il probable qu'il s'agisse de morceaux de lave[76] ;
- Rochers
 Des rochers de la taille d'une maison sont dispersés sur cette photo.
Des rochers de la taille d'une maison sont dispersés sur cette photo. Rochers près du volcan Ascraeus Mons. Les volcans martiens sont sans doute à l'origine de ces roches dures constituées de basalte qui ont résisté à l'érosion découlant du climat actuel de Mars.
Rochers près du volcan Ascraeus Mons. Les volcans martiens sont sans doute à l'origine de ces roches dures constituées de basalte qui ont résisté à l'érosion découlant du climat actuel de Mars.
- des centaines de traînées noires ont été observées. La plupart des scientifiques considèrent qu'il s'agit d'avalanches de poussière[77]. Mais certains chercheurs pensent que de l'eau pourrait être impliquée dans leur formation[78],[79],[80] ;
- Traînées noires
 Traînées noires dans le quadrangle de Diacria.
Traînées noires dans le quadrangle de Diacria. Traînées noires dans la région de Phlegra Dorsa. La traînée près du centre de la photo a contourné une petite colline. La photo couvre une zone de 3 km de large.
Traînées noires dans la région de Phlegra Dorsa. La traînée près du centre de la photo a contourné une petite colline. La photo couvre une zone de 3 km de large. Des traînées noires et brillantes sont visibles dans ce cratère situé près d'Arabia Terra.
Des traînées noires et brillantes sont visibles dans ce cratère situé près d'Arabia Terra. De nombreuses traînées noires ont évolué au cours des nombreuses années d'observations de MGS.
De nombreuses traînées noires ont évolué au cours des nombreuses années d'observations de MGS.
- Calottes polaires
 La calotte australe durant l'hiver 2000.
La calotte australe durant l'hiver 2000.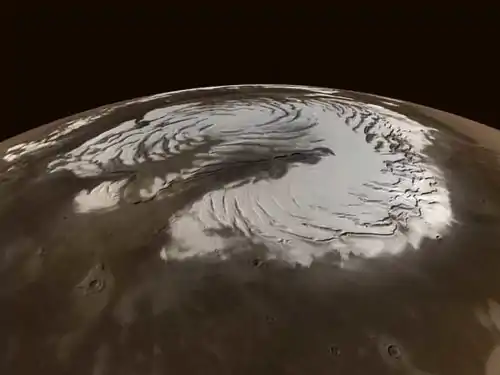 Calotte du pôle nord.
Calotte du pôle nord. Les taches noires sont formées par du dioxyde de carbone en train de dégeler dans la région du pôle sud.
Les taches noires sont formées par du dioxyde de carbone en train de dégeler dans la région du pôle sud.
- MGS a permis de détecter une vingtaine de cratères d'impact apparus après l'arrivée de MGS sur son orbite martienne. Le cratère proprement dit (pont noir) est de très petite taille (quelques dizaines de mètres) par rapport à la zone couverte par les débris soulevés par l'impact et par les impacts secondaires qui s'étend sur plusieurs centaines de mètres.
- Cratères d'impact formés après l'arrivée de MGS
 L'apparition de ce cratère d'impact photographié par MGS et situé dans Ulysses Patera a pu être datée entre le et le . Son diamètre est de 19,8 ± 3 mètres.
L'apparition de ce cratère d'impact photographié par MGS et situé dans Ulysses Patera a pu être datée entre le et le . Son diamètre est de 19,8 ± 3 mètres.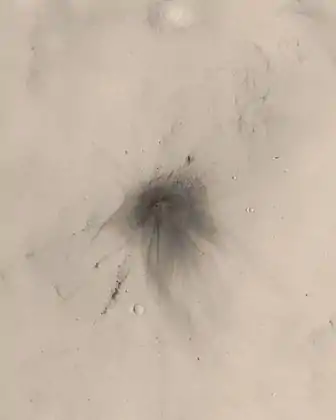 Cratère d'impact situé dans Arabia Terra. Le cratère a un diamètre de 22,6 ± 1,7 mètres. Deux photos prises par ailleurs permettent de dater son apparition entre le et le .
Cratère d'impact situé dans Arabia Terra. Le cratère a un diamètre de 22,6 ± 1,7 mètres. Deux photos prises par ailleurs permettent de dater son apparition entre le et le .
- Lunes de Mars
 Gros plan sur le cratère Stickney de la lune Phobos.
Gros plan sur le cratère Stickney de la lune Phobos. Le monolithe de Phobos (1998).
Le monolithe de Phobos (1998).
Validation de nouvelles techniques spatiales

D'un point de vue technique, le déroulement de la mission a permis de valider la solution de l'aérofreinage pour se placer sur une orbite basse autour de Mars. Cette solution sera retenue pour les trois orbiteurs suivants de la NASA : Mars Climate Orbiter lancé en 1999, Mars Odyssey (2001) et Mars Reconnaissance Orbiter (2005)[81]. Les tests réalisés en utilisant en parallèle un émetteur radio expérimental fonctionnant en bande Ka et l'émetteur opérationnel fonctionnant en bande X ont démontré que le recours à la bande Ka permettait de multiplier par trois le débit de données. La mise au point de cette nouvelle technique de communications sera poursuivie dans le cadre de la mission technologique Deep Space 1[82].
Support des opérations des autres engins spatiaux
Durant une décennie, Mars Global Surveyor a assuré le support des autres missions martiennes de la NASA. Son antenne relais a transmis vers la Terre 7,7 gigabits de données scientifiques et de télémesures produites par les rovers MER. Elle a joué un rôle critique pour la mission de Spirit en en transmettant les données de sa rentrée atmosphérique. Ses images ont été utilisées pour identifier les sites d'atterrissage les plus favorables pour les rovers MER, Mars Polar Lander et Phoenix, déterminer les conditions météorologiques durant les phases d'aérofreinage des orbiteurs arrivés en orbite martienne à compter de 2001, observer les conditions météorologiques immédiatement avant les atterrissages et tenter de retrouver les traces des atterrisseurs Mars Polar Lander et Beagle 2[83].
Retombées culturelles et politiques
Les nombreuses images fournies par MGS contribuent à raviver l'intérêt du grand public pour l'exploration spatiale, ce qui se manifeste par exemple au cinéma par la sortie de Mission to Mars et de Planète rouge en 2000[84]. Par ailleurs, le succès de MGS favorise le financement de plusieurs missions à la fin des années 1990[84].
Notes et références
Notes
- Le coût de réalisation de la caméra MOC, évalué à 5-6 millions, atteint finalement 23,7 millions de dollars. 40 % du surcoût est attribué à des modifications apportées au cahier des charges ou dans les procédures à l'initiative du centre JPL ou de la NASA, 25 % aux problèmes rencontrés en cours de développement, 20 % au manque d'expérience ou aux incompréhensions et 15 % à une augmentation des performances(Malin et Edgett 2010).
- Du fait de l'orbite très elliptique parcourue durant cette phase, la caméra MOC fonctionne avec des variations de température non prévues qui déforment ses miroirs et réduisent la résolution spatiale d'un facteur 2 à 3 (Malin et Edgett 2001).
- Les ergols sont indispensables pour le contrôle d'attitude (désaturation des roues de réaction) et les corrections d'orbite.
Références
- (en) Malin Space Science Systems & California Institute of Technology – Mars Global Surveyor's Mars Orbiter Camera – 7 octobre 2002 « MGS MOC Release No. MOC2-320, 7 October 2002 », montrant à droite les ravines issues d'une strate géologique précise qui est nettement visible en pleine résolution.
- Albee et al. 2001, p. 23291
- Ulivi et Harland 2009, p. 327-328.
- Ulivi et Harland 2009, p. 333.
- Taylor 2007, p. 84-91.
- Ulivi et Harland 2009, p. 379-381
- Malin et Edgett 2010
- (en) « Science summary », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Science Goal 1: Determine if Life Ever Arose On Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Goal 2: Characterize the Climate of Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Goal 3: Characterize the Geology of Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Goal 4: Prepare for the Human Exploration of Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Science objectives », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- Albee et al. 2001, p. 23292.
- (en) « Technology Summary », sur NASA JPL, JPL
- (en) Arden L. Albee, Raymond E. Arvidson, Frank Palluconi et Thomas Thorpe, « Mars Global Surveyor : Ready for launch in november 1996 », AIAA, , p. 23291–23316 (lire en ligne [PDF]).
- Dossier de presse de la NASA, p. 27.
- Albee et al. 2001, p. 23297.
- (en) R. Bunker et al., « The MGS Avionics System Architecture: Exploring the limits of inheritance », AIAA, , p. 1-6 (lire en ligne).
- Dossier de presse de la NASA, p. 27-30.
- Dossier de presse de la NASA, p. 32-33.
- (en) « Mars Global Surveyor - Mars Orbiter Camera (MOC) », sur NASA NSSDC Master Catalog, NASA (consulté le ).
- (en) « Mars Global Surveyor - Thermal Emission Spectrometer (TES) », sur NASA NSSDC Master Catalog, NASA (consulté le ).
- (en) « Mars Global Surveyor - Mars Orbiter Laser Altimeter (MOLA) », sur NASA NSSDC Master Catalog, NASA (consulté le ).
- (en) « Mars Global Surveyor - Magnetometer/Electron Reflectometer (MAG/ER) », sur NASA NSSDC Master Catalog, NASA (consulté le ).
- D. L. Mitchell 2001, p. 23420.
- (en) « Mars Observer - Mars Orbiter Laser Altimeter (MOLA) », sur NASA NSSDC Master Catalog, NASA (consulté le ).
- (en) « Mars Relay », sur NASA JPL, Jet Propulsion Laboratory.
- Ulivi et Harland 2009, p. 418.
- Ulivi et Harland 2009, p. 389-390.
- Ulivi et Harland 2009, p. 390-392.
- Ulivi et Harland 2009, p. 393-396.
- Albee et al. 2001, p. 23303.
- Ulivi et Harland 2009, p. 396-401.
- Ulivi et Harland 2009, p. 398-416.
- Ulivi et Harland 2009, p. 416-421.
- (en) « System requirements - 3.1.1 Lifetime », sur NASA JPL, Jet Propulsion Laboratory, (consulté le ).
- Ulivi et Harland 2009, p. 421-422.
- (en) « Mars Global Surveyor (MGS) Spacecraft Loss of Contact », sur NASA JPL, NASA, .
- « Mars Reconnaissance Orbiter > Mission timeline », Jet Propulsion Laboratory (consulté le ).
- « Mars Reconnaissance Orbiter > HiRISE High Resolution Imaging Science Experiment », Jet Propulsion Laboratory (consulté le ).
- « Mars Reconnaissance Orbiter > Telecommunications », Jet Propulsion Laboratory (consulté le )
- Ulivi et Harland 2009, p. 423
- Albee et al. 2001, p. 23307
- Ulivi et Harland 2009, p. 415
- (en) J. E. P. Connerney, M. H. Acuña, P. J. Wasilewski, G. Kletetschka, N. F. Ness, H. Rème, R. P. Lin et D. L. Mitchell, « The global magnetic field of Mars and implications for crustal evolution », Geophysical Research Letters, vol. 28, no 21, , p. 4015-4018 (ISSN 0094-8276, DOI 10.1029/2001GL013619, lire en ligne).
- (en) « Magnetic Field Experiment MAG/ER », NASA Mars Global Surveyor, .
- (en) « The Solar Wind at Mars », Science@NASA,
- (en) « Mars Crustal Magnetic Field Remnants », NASA's Mars Exploration Program,
- Rocard 2003-2006, p. 59
- (en) Laurent Carporzen, Stuart A. Gilder et Rodger J. Hart, « Palaeomagnetism of the Vredefort meteorite crater and implications for craters on Mars », Nature, vol. 435, , p. 198-201 (ISSN 0028-0836, DOI 10.1038/nature03560, résumé).
- Rocard 2003-2006, p. 60
- (en) J. L. Bandfield,, « Global mineral distributions on Mars », J. Geophys Res., vol. 107, (DOI 10.1029/2001JE001510, Bibcode 2002JGRE..107.5042B, lire en ligne [PDF]).
- (en) T. D. Glotch et P. R. Christensen, « Geologic and mineralogic mapping of Aram Chaos: Evidence for a water-rich history », J. Geophys. Res., vol. 110, , E09006 (DOI 10.1029/2004JE002389, Bibcode 2005JGRE..11009006G).
- (en) « Mars Exploration Rovers - Spotlight - Hematite », sur NASA JPL, Jet Propulsion Laboratory, (consulté le ).
- Ulivi et Harland 2009, p. 419
- Ulivi et Harland 2009, p. 416-418
- Malin et Edgett 2010
- Malin et Edgett 2010
- « Martian moon Phobos hip deep in powder », Jet Propulsion Laboratory,
- Malin et Edgett 2001, p. 1-137
- Malin et Edgett 2001, p. 31-35
- Malin et Edgett 2001, p. 72
- « Mars Global Surveyor MOC2-1618 Release », Msss.com (DOI 10.1126/science.288.5475.2330, consulté le )
- (en) M. C. Malin, K. S. Edgett, L. V. Posiolova, S. M. McColley et E. Z. N. Dobrea, « Present-Day Impact Cratering Rate and Contemporary Gully Activity on Mars », Science, vol. 314, no 5805, , p. 1573–1577 (ISSN 0036-8075, DOI 10.1126/science.1135156)
- « Changing Mars Gullies Hint at Recent Flowing Water », SPACE.com,
- « Mars Global Surveyor MOC2-239 Release », Mars.jpl.nasa.gov (consulté le )
- Malin et Edgett 2001, p. 26-28.
- (en) « Mars Global Surveyor MOC2-281 Release », Mars.jpl.nasa.gov,
- (en) « Mars Global Surveyor MOC2-367 Release », Msss.com, .
- (en) Michael D. Smith, John C. Pearl, Barney J. Conrath et Philip R. Christensen, « One Martian year of atmospheric observations by the thermal emission spectrometer », Geophysical Research Letters, vol. 28, no 22, , p. 4263–4266 (DOI 10.1029/2001GL013608)
- (en) D. P. Hinson, « Comparison of atmospheric temperatures obtained through infrared sounding and radio occultation by Mars Global Surveyor », Journal of Geophysical Research, vol. 109, no E12, (ISSN 0148-0227, DOI 10.1029/2004JE002344)
- (en) Michael D. Smith, « Spacecraft Observations of the Martian Atmosphere* », Annual Review of Earth and Planetary Sciences, vol. 36, no 1, , p. 191–219 (ISSN 0084-6597, DOI 10.1146/annurev.earth.36.031207.124334)
- (en) R. T. Clancy, B. J. Sandor, M. J. Wolff, P. R. Christensen, M. D. Smith, J. C. Pearl, B. J. Conrath et R. J. Wilson, « An intercomparison of ground-based millimeter, MGS TES, and Viking atmospheric temperature measurements: Seasonal and interannual variability of temperatures and dust loading in the global Mars atmosphere », Journal of Geophysical Research, vol. 105, no E4, , p. 9553 (ISSN 0148-0227, DOI 10.1029/1999JE001089)
- (en) J. F. Bell, M. J. Wolff, M. C. Malin, W. M. Calvin, B. A. Cantor, M. A. Caplinger, R. T. Clancy, K. S. Edgett, L. J. Edwards, J. Fahle, F. Ghaemi, R. M. Haberle, A. Hale, P. B. James, S. W. Lee, T. McConnochie, E. Noe Dobrea, M. A. Ravine, D. Schaeffer, K. D. Supulver et P. C. Thomas, « Mars Reconnaissance Orbiter Mars Color Imager (MARCI): Instrument description, calibration, and performance », Journal of Geophysical Research, vol. 114, no E8, (ISSN 0148-0227, DOI 10.1029/2008JE003315)
- Malin et Edgett 2001, p. 76
- Malin et Edgett 2001, p. 77-78
- (en) T. Motazedian, « Currently Flowing Water on Mars », dans Lunar and Planetary Science, vol. XXXIV, (lire en ligne [PDF])
- (en) « Mars Water, Odd Surface Features Tied to Life », SPACE.com,
- (en) « Mars Global Surveyor MOC2-284 Release », Mars.jpl.nasa.gov (consulté en )
- (en) J.H.J. Prince et al., « AUTONOMOUS AEROBRAKING: A DESIGN, DEVELOPMENT, AND FEASIBILITY STUDY », AAS, , p. 31-41 (lire en ligne)
- (en) D. Morabito et al., « The Mars Global Surveyor Ka-Band Link Experiment (MGS/KaBLE-II) », NASA, , p. 1-41 (lire en ligne)
- Malin et Edgett 2010
- (en) Peter J. Westwick, Into the Black : JPL and the American Space Program, 1976-2004, Yale University Press, , 416 p. (lire en ligne), p. 275.
Bibliographie
- NASA
- (en) NASA/JPL, Mars Global Surveyor Arrival Press Kit, (lire en ligne [PDF])
- (en) NASA/JPL, Mars Global Surveyor Spacecraft Requirements, (lire en ligne)
- (en) Jim Taylor et al., Mars Global Surveyor Telecommunications, Jet Propulsion Laboratory (NASA), coll. « DESCANSO Design and Performance Summary Series », (lire en ligne [PDF])
- Ouvrages de synthèse
- (en) Paolo Ulivi et David M. Harland, Robotic Exploration of the Solar System : Part 2 Hiatus and Renewal 1983-1996, Chichester, Springer Praxis, , 535 p. (ISBN 978-0-387-78904-0)Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1983 et 1996.
- (en) Peter J. Westwick, Into the black : JPL and the American space program, 1976-2004, New Haven, Yale University Press, , 413 p. (ISBN 978-0-300-11075-3) — Histoire du Jet Propulsion Laboratory entre 1976 et 2004
- (en) Erik M. Conway, Exploration and engineering : the Jet propulsion laboratory and the quest for Mars, Baltimore, Johns Hopkins University Press, , 418 p. (ISBN 978-1-4214-1605-2, lire en ligne) — Histoire du programme d'exploration martien du Jet Propulsion Laboratory
- Résultats scientifiques - articles/ouvrages de synthèse
- (en) Arden L. Albee, Raymond E. Arvidson, Frank Palluconi et Thomas Thorpe, « Overview of the Mars Global Surveyor mission », Journal of Geophysical Research, vol. 106, no E10, , p. 23291–23316 (lire en ligne [PDF])
- (en) Michael D. Smith et al., « Spacecraft Observations of the Martian Atmosphere », Annual Review of Earth and Planetary Sciences, vol. 36, , p. 191-219 (DOI 10.1146/annurev.earth.36.031207.124334, lire en ligne [PDF])Synthèse des observations effectées sur l'atmosphère martienne par les orbiteurs martiens à 2008
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9)
- Francis Rocard, Planète rouge : dernières nouvelles de Mars, Paris, Dunod, coll. « Quai des Sciences », 2003-2006, 2e éd., 257 p. (ISBN 978-2-10-049940-3 et 2-10-049940-8)
- Résultats scientifiques - articles des concepteurs des instruments
- (en) M. C. Malin et K. S. Edgett, « Mars Global Surveyor Mars Orbiter Camera: Interplanetary cruise through primary mission », Journal of Geophysical Research, vol. 106, no E10, , p. 23429–23570 (DOI 10.1029/2000JE001455, lire en ligne [PDF])Principales découvertes effectuées à l'aide de la caméra MOC à l'issue de la mission primaire
- (en) M. C. Malin, K. S. Edgett et al., « An overview of the 1985–2006 Mars Orbiter Camera science investigation », Mars, , p. 1-60 (lire en ligne [PDF])Synthèse des travaux scientifiques effectuées à l'aide de la caméra MOC pour la période 1985-2006
- (en) D. E. Smith et al., « Mars Orbiter Laser Altimeter: Experiment summary after the first year of global mapping of Mars », Journal of Geophysical Research, vol. 106, no E10, , p. 23 689–23 722 (DOI 10.1029/2000JE001364, lire en ligne [PDF])Résultats d'une année martienne de mesures der l'altimètre MOLA
- (en) P. R. Christensen et al., « Mars Global Surveyor Thermal Emission Spectrometer experiment: Investigation description and surface science results », Journal of Geophysical Research, vol. 106, no E10, , p. 23823-23871 (lire en ligne [PDF])Résultats d'une année martienne de mesures du spectromètre infrarouge TES
- (en) M. H. Acuna et al., « Magnetic field of Mars: Summary of results from the aerobraking and mapping orbits », Journal of Geophysical Research, vol. 106, no E10, , p. 23403–23417 (DOI 10.1029/2000JE001404, lire en ligne [PDF])Étude du champ magnétique martien exploitant une année martienne de mesures avec le magnétomètre MAG
- (en) D. L. Mitchell et al., « Probing Mars' crustal magnetic field and ionosphere with the MGS Electron Reflectometer », Journal of Geophysical Research, vol. 106, no E10, , p. 23403–23417 (DOI 10.1029/2000JE001435, lire en ligne [PDF])Étude de la croute magnétisée et de l'ionosphère exploitant une année martienne de mesures avec le réflectomètre ER
- (en) G. Leonard Tyler et al., « Radio science observations with Mars Global Surveyor: Orbit insertion through one Mars year in mapping orbit », Journal of Geophysical Research, vol. 106, no E10, , p. 23327–23348 (DOI 10.1029/2000JE001348, lire en ligne)Résultats d'une année martienne de mesures avec l'instrument de radio science RS
- (en) G. M.d Keating et al., « The Structure of the Upper Atmosphere of Mars: In Situ Accelerometer Measurements from Mars Global Surveyor », Science, vol. 279, no 5357, , p. 1672-1676 (DOI 10.1126/science.279.5357.1672, lire en ligne)Structure de la haute atmosphère déduite des mesures de l'accéléromètre durant la phase d'aérofreinage.
Voir aussi
Articles connexes
- Mars
- Exploration spatiale de Mars
- Exploration de Mars
- Mars Observer : mission dont Mars Global Surveyor reprend les objectifs et la majeure partie des instruments
- Mars Reconnaissance Orbiter : mission qui prend le relais de Mars Global Surveyor en 2006
- Techniques spatiales
- Aérofreinage : technique spatiale utilisée pour la première fois par une sonde spatiale dans le but de remplir sa mission primaire