Mars Reconnaissance Orbiter
Mars Reconnaissance Orbiter (MRO) est une mission spatiale américaine de la NASA en orbite autour de Mars. La sonde spatiale MRO a été lancée le par une fusée Atlas V-401 depuis la base de lancement de Cap Canaveral et s'est insérée en orbite martienne le . La sonde a modifié son orbite durant les cinq mois suivants en utilisant la technique de l'aérofreinage pour parvenir à se placer sur une orbite basse circulaire.
Pour les articles homonymes, voir MRO.
Sonde spatiale

| Organisation |
|
|---|---|
| Constructeur |
|
| Domaine | Étude de Mars |
| Type de mission | Orbiteur |
| Statut | Opérationnel (en février 2021) |
| Autres noms | MRO |
| Lancement | |
| Lanceur | Atlas V 401 |
| Identifiant COSPAR | 2005-029A |
| Site |
| Masse au lancement | 2 180 kg dont 1 149 kg d'ergols |
|---|
| Périapside | 250 km |
|---|---|
| Apoapside | 316 km |
| Inclinaison | 93° |
| HIRISE | Télescope |
|---|---|
| CRISM | Spectromètre imageur infrarouge/lumière visible |
| MCS | Radiomètre |
| SHARAD | Radar |


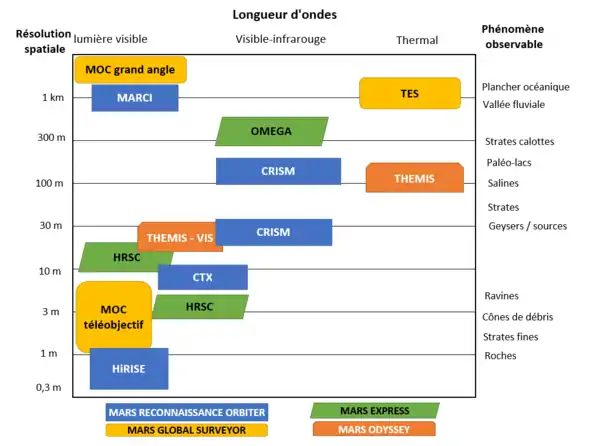
L'objectif principal de la mission MRO est de cartographier la surface de Mars. L'orbiteur de grande taille (plus de 2 tonnes avec les ergols) dispose pour remplir cet objectif du télescope HIRISE permettant d'obtenir des images avec une résolution de 20 à 30 cm. Cet instrument est complété par un spectromètre et un radiomètre fonctionnant en lumière visible et infrarouge ainsi que par un radar qui permettent de déterminer la composition minéralogique du sol, sa géologie ainsi que de rechercher l'eau piégée sous forme de glace. Enfin, MRO est équipé d'un système de télécommunications qui doit lui permettre de transférer des volumes de données très importants vers la Terre et de jouer le rôle de relais pour les données collectées par les atterrisseurs et rovers posés à la surface de Mars tels que Mars Science Laboratory.
En arrivant en orbite autour de Mars, MRO prend la suite de Mars Global Surveyor et devient le quatrième satellite artificiel opérationnel en orbite autour de la planète rouge avec la sonde européenne Mars Express, et les deux sondes de la NASA 2001 Mars Odyssey et Mars Global Surveyor. Les instruments de MRO ont permis notamment d'estimer le volume de la calotte polaire de Mars, de détecter de la glace dans des cratères situés à une latitude relativement basse, d'observer des avalanches et de détecter plusieurs types de minéraux. La mission initiale, qui s'achevait en , a été prolongée à plusieurs reprises et devrait rester opérationnelle jusqu'au milieu de la décennie .
Contexte
En recherchant les raisons de l'échec de la sonde spatiale Mars Polar Lander (MPL) perdue durant la phase d'atterrissage sur le sol martien, les responsables de la NASA constatent qu'ils ne disposent pas de moyens leur garantissant que le site d'atterrissage ne présente aucun risque. Les meilleures images fournies par les sondes spatiales en orbite autour de Mars (Mars Global Surveyor et 2001 Mars Odyssey) ont une résolution spatiale de deux mètres. Ce niveau de détail ne permet pas d'identifier des rochers d'un mètre susceptibles de faire basculer un engin spatial au moment de son atterrissage. Ne pouvant se reposer entièrement sur les photos prises par MGS, les concepteurs de la mission MPL se sont ainsi basés sur des statistiques de distribution des rochers pour sélectionner le site d'atterrissage. Bien qu'un accident de ce type ait été écarté pour expliquer l'échec de Mars Polar Lander, la NASA décide de développer un orbiteur martien capable de fournir des images permettant d'éliminer ce risque pour les prochaines missions envoyées sur le sol de Mars. Une résolution de 30 centimètres est retenue pour la caméra embarquée par le futur orbiteur martien qui est baptisé Mars Reconnaissance Orbiter (MRO). Les scientifiques responsables des instruments embarqués à bord de Mars Climate Orbiter, également perdu en , obtiennent que MRO emporte une copie du principal instrument (rebaptisé Mars Climate Sounder ou MCS) pour étudier l'atmosphère et le climat de la planète. La décision de développer Mars Reconnaissance Orbiter est prise au début de l'année quelques mois après le démarrage du projet de rovers martiens Mars Exploration Rover (MER) mais, alors que les rovers doivent être lancés en , la date de lancement de MRO pour la fenêtre de lancement suivante est fixée en [1].
Objectifs
Les contributions de la mission MRO s'inscrivent dans les objectifs scientifiques que la NASA a assigné à son programme martien[2] :
- déterminer si la vie a pu apparaître sur Mars[3] ;
- définir les caractéristiques du climat martien[4] ;
- étudier la géologie de la planète[5] ;
- préparer les futures missions d'exploration avec équipage[6].
Les objectifs scientifiques suivants sont assignés à la mission MRO[7] :
- caractériser le climat actuel de Mars et les mécanismes physiques à l'origine des changements climatiques saisonniers et interannuels ;
- déterminer la nature des terrains présentant une stratification complexes et identifier les formations de surface résultant de l'action de l'eau ;
- rechercher les sites présentant des signes d'une activité liée à la circulation de l'eau en surface ou à l'hydrothermalisme ;
- identifier et caractériser les sites ayant le plus fort potentiel pour des missions impliquant des atterrisseurs ou des rovers ainsi que des missions de retour d'échantillons martiens.
Par ailleurs, la sonde spatiale joue un rôle très important pour les missions à la surface de Mars assurant le relais entre les engins posés sur le sol de Mars et la Terre.
Architecture de la mission
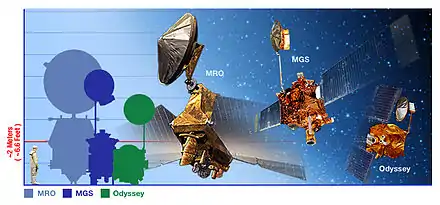
| Orbiteur : | MRO | MGS | Odyssey |
|---|---|---|---|
| Date de lancement | 2005 | 1996 | 2001 |
| Masse totale | 2 180 kg | 1 055 kg | 733 kg |
| Orbite | 255 x 320 km | 380 km | 400 km |
| Résolution spatiale | 0,3 m | 1,5 m | 18 m. |
| Volume de données transmises (gigabits/jour) | 20 à 90 | 0,7 | 1 |
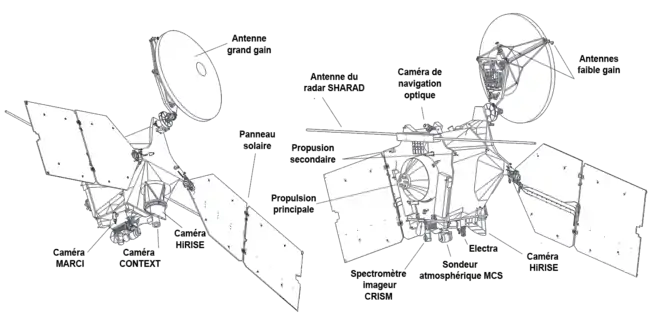
La mission primaire de Mars Reconnaissance Orbiter doit durer deux années martiennes (soit quatre années terriennes) : la première année est consacrée aux observations scientifiques tout en assurant le relais avec les engins posés à la surface de Mars. La deuxième année, les priorités sont inversées. Comme les orbiteurs qui l'ont précédé, MRO circule sur une orbite héliosynchrone : celle-ci passe au-dessus de l'équateur à 3 heures de l'après-midi pour privilégier la prise d'images qui nécessite des ombres longues. L'orbite est plus basse que Mars Global Surveyor (255 x 320 km au lieu de 370 km) ce qui augmente la résolution spatiale des photos. Comme les deux orbiteurs martiens qui l'ont précédé, MRO a recours à l'aérofreinage pour atteindre l'orbite à partir de laquelle il effectue ces relevés scientifiques. Cette technique permet d'économiser près de 580 kg d'ergols. Le choix de la résolution spatiale de la caméra principale fait débat : certains scientifiques souhaiteraient une résolution pas trop élevée pour disposer d'une couverture photographique relativement complète de la planète : la résolution la plus fine envisagée nécessiterait en effet 200 000 jours d'observation pour couvrir l'ensemble de la surface de Mars. Le choix d'une résolution élevée, raison d'être de MRO, est néanmoins retenu : la caméra HiRISE doit fournir des images ayant une résolution de 30 cm tandis qu'une deuxième caméra ayant une résolution de 6 mètres restituera le contexte de la photo. L'orbiteur emporte également un radar (SHARAD) optimisé pour analyser les couches superficielles du sol sur une profondeur de 1 km, un spectromètre imageur (CRISM) fonctionnant en infrarouge et en lumière visible et doté d'une résolution spatiale remarquable de 20 mètres et un sondeur atmosphérique (MCS) fournissant la température et la pression de l'atmosphère martienne ainsi que la température des calottes polaires. Pour faire face au volume des images de grande taille produites par sa caméra principale (80 fois plus de volume de données généré que 2001 Mars Odyssey), MRO dispose d'un système de télécommunications particulièrement performant utilisant pour la première fois la bande Ka de manière opérationnelle et comportant une antenne parabolique de 3 mètres de diamètre. Le satellite qui emporte une charge utile particulièrement importante (139 kg) pèse deux fois plus lourd que Mars Global Surveyor (2 180 kg contre 1 055 kg). Le coût de la mission (environ 720 millions US$ avec les opérations de la mission primaire) démontre que la NASA s'est démarquée en partie du dogme du faster, cheaper, better[8],[9].
Construction de la sonde spatiale
La gestion du projet est confiée, comme les autres missions martiennes, au centre Jet Propulsion Laboratory de la NASA dont le siège est en Californie. En , le JPL choisit de confier à l'établissement de Denver de la société Lockheed Martin Space Systems la construction de la sonde spatiale. La gestion des opérations en vol, qui nécessite une expertise particulière du fait de la très haute définition de la caméra, est également confiée à Lockheed car la société dispose de compétences dans le domaine, acquises en réalisant des satellites de reconnaissance. Les instruments scientifiques sont développés à Tucson, par l'Université de l'Arizona, à Laurel dans le Maryland, au laboratoire de physique appliquée de l'Université Johns-Hopkins, mais également en Europe, à Rome, à l'Agence spatiale italienne (ASI) ainsi qu'à San Diego en Californie, au Malin Space Science Systems et au Jet Propulsion Laboratory.
Caractéristiques techniques de la sonde spatiale
Structure de la sonde
La structure de la sonde spatiale est réalisée en matériau composite contenant du graphite renforcé de matière plastique, complété par des panneaux en nid d'abeille d'aluminium. Le réservoir en titane contenant le carburant utilisé par la sonde est la pièce la plus importante de MRO et assure la rigidité de l'ensemble. La masse totale est inférieure à 2 180 kilogrammes, dont 1 149 kilogrammes d'ergols. À l'origine, l'orbiteur pesait 2 180 kilogrammes, mais les ingénieurs ont réussi à réduire le poids de la sonde de 51 kg. Cet allègement de la structure a permis de rajouter un supplément d'hydrazine, afin d'étendre la durée de vie de la sonde jusqu'en . La charge utile a une masse de 139 kg.
Système d'alimentation électrique

L'énergie électrique de la sonde Mars Reconnaissance Orbiter est fournie par deux panneaux solaires, longs de 5,35 mètres pour une largeur de 2,53 mètres et montés de chaque côté du corps de la sonde. Chaque panneau solaire a une superficie d'environ 9,5 mètres carrés et comporte 3 744 cellules solaires, constituées de trois couches cristallines qui permettent de convertir plus efficacement l'énergie solaire en électricité. Dans le cas de MRO, ces cellules sont capables de convertir plus de 26 % de l'énergie solaire incidente, et peuvent délivrer un maximum de 2 000 watts sous 32 V en orbite martienne. Chaque panneau peut pivoter de façon indépendante autour de deux axes (rotation du haut vers le bas, ou de gauche à droite), et peut ainsi recevoir le rayonnement solaire sous un angle optimal.
Mars Reconnaissance Orbiter utilise deux batteries rechargeables au nickel métal hydrure. Les batteries sont utilisées comme source d'énergie lorsque les panneaux solaires ne font pas face au Soleil (comme durant le lancement, l'insertion orbitale ou le freinage atmosphérique), ou lors des passages dans l'ombre de Mars. Chaque batterie possède une capacité de stockage d'énergie de 50 Ah, mais la sonde n'ayant pas besoin de toute cette énergie, la batterie ne sera probablement utilisée qu'à environ 40 % de sa capacité, au début de la mission. Cette capacité diminue avec leur usure et celle des panneaux solaires. Lorsque la tension restante tombera sous 20 V, l'ordinateur de bord cessera de fonctionner.
Électronique embarquée
L'ordinateur principal de Mars Reconnaissance Orbiter est un processeur 32-bit RAD750, comprenant 10,4 millions de transistors, et dont l'horloge interne est cadencée à 133 MHz. Ce processeur est une version spéciale du processeur PowerPC750, aussi appelé G3, mais cette version est durcie pour résister aux radiations spatiales. Une carte mère spécifique a été réalisée pour l'occasion. Le processeur RAD750 est le successeur du RAD6000. Bien entendu, ce processeur peut paraître désuet si on le compare à un PC ou à un Macintosh, mais il est particulièrement fiable dans l'espace, pouvant même fonctionner lors des tempêtes solaires.
Les données scientifiques sont stockées dans une mémoire flash de 160 gigabits (20 gigaoctets), constituée d'environ 700 puces de mémoire, chaque puce ayant une capacité de 256 Mbits. Cette capacité de stockage n'est pas très importante, si l'on considère que le volume de données acquis pèsera lourd. En effet, une seule image de la caméra HiRISE pourra occuper jusqu'à 28 Gigabits de données.
Le système d'exploitation du vaisseau, VxWorks, dispose de nombreux outils permettant d'effectuer le suivi et la gestion de l'engin. De nombreux protocoles inclus dans VxWorks lui permettent de diagnostiquer précisément d'éventuelles erreurs.
Systèmes de navigation
Les systèmes de navigation et des senseurs fourniront des données aux ingénieurs (position du vaisseau, cap et altitude) :
- seize senseurs solaires (dont huit de secours) sont placés tout autour du vaisseau, pour mesurer la position de celui-ci par rapport au Soleil ;
- deux senseurs stellaires sont utilisés pour fournir un pointage de précision à l'orbiteur, afin de déterminer son orientation. Ces « chercheurs d'étoiles » sont de simples caméras numériques utilisées pour reconnaître la position d'étoiles cataloguées de manière autonome ;
- deux centrales inertielles sont aussi présentes à bord (dont une de secours). Elles fourniront des données lors des mouvements du vaisseau. Chaque centrale à inertie est constituée de trois accéléromètres et de trois gyroscopes de type gyrolaser.
Système de télécommunications

Le sous-système chargé des télécommunications utilise une grande antenne pour transmettre ses données à la fréquence couramment utilisée pour les sondes interplanétaires (soit la bande X, à la fréquence de 8 GHz). MRO innove en utilisant de manière expérimentale la bande Ka, à 32 GHz, afin de transmettre des données à haut débit. La vitesse de transmission des données peut atteindre 6 Mbit/s. Ce taux de transfert de données est dix fois plus élevé que pour les précédents orbiteurs martiens. Deux amplificateurs seront utilisées pour la fréquence radio en bande-X (puissance émise de 100 watts, le second amplificateur étant un appareil de secours). Un amplificateur en bande Ka consomme 35 watts. Au total, la sonde achemine deux transpondeurs.
Deux antennes plus petites, à faible gain, sont aussi intégrées à la sonde, pour les communications à bas débit (elles seront utilisées en cas de situations critiques, lors du lancement ou de l'insertion en orbite martienne). Ces antennes n'ont pas besoin d'être pointées vers la Terre, elles peuvent transmettre et émettre dans n'importe quelle direction.
Système de propulsion
Pour se propulser, la sonde comprend vingt moteurs-fusées monoergols qui brûlent tous de l'hydrazine, un carburant qui produit spontanément des gaz, sans système de mise à feu, en passant sur un catalyseur. MRO emporte 1 220 kg d'hydrazine, dont 70 % est utilisé lors de la manœuvre d'insertion en orbite. L'hydrazine est injectée dans les moteurs en étant mis sous pression par de l'hélium stocké dans un réservoir spécial. Les moteurs sont de trois types :
- six moteurs sont utilisés pour les manœuvres orbitales nécessitant une poussée importante, en particulier l'insertion en orbite autour de Mars. Chacun des moteurs produit 170 newtons de poussée, soit un total de 1 020 N. En utilisant plusieurs moteurs plutôt qu'un seul pour la mise en orbite autour de Mars, le risque créé par la défaillance d'un moteur est réduit ;
- six moteurs de poussée intermédiaire (22 newtons) sont consacrés aux manœuvres de correction de trajectoire, au cours du transit entre la Terre et Mars, mais également pour ajuster l'altitude durant l'aérofreinage lorsque MRO plongera dans l'atmosphère martienne ;
- huit petits moteurs de 0,9 newton de poussée sont utilisés pour contrôler l'orientation de la sonde, et assistent dans cette fonction les roues de réaction. Ils servent également à désaturer ces dernières. Ils sont également utilisés pour contrôler le roulis, lorsque les autres moteurs sont déjà utilisés pour modifier la trajectoire.
Quatre gyroscopes sont aussi inclus, afin d'orienter finement le satellite, comme lors de l'acquisition d'images à très haute résolution, où le moindre « faux mouvement » de l'orbiteur pourrait rendre l'image floue. Chaque gyroscope est utilisé pour un mouvement axial. Le quatrième gyroscope pourra remplacer n'importe lequel des trois autres en cas de défaillance éventuelle. Chaque gyroscope pèse 10 kg et peut tourner très rapidement (jusqu'à 6 000 tours par minute).
Instrumentation scientifique
Six instruments scientifiques sont embarqués à bord du vaisseau, ainsi que deux instruments qui, exploitant des données récoltées par les sous-systèmes du vaisseau, représentent une masse totale de 139 kg. Trois démonstrateurs technologiques sont également embarqués pour être éventuellement utilisés lors de missions futures. Les principaux buts de la mission de Mars Reconnaissance Orbiter sont la recherche d'éventuelles ressources aquifères, la caractérisation de l'atmosphère et de la géologie martienne.
- Caméras
- Spectromètre
- CRISM (Compact Reconnaissance Imaging Spectrometer for Mars)
- Radiomètre
- MCS (Mars Climate Sounder)
- Radar
- SHARAD (Shallow Radar)
HiRISE
La caméra HiRISE (High Resolution Imaging Science Experiment) est constituée d'un télescope de 50 cm de diamètre et d'une longueur focale de 12 m, qui demeure en 2016 la plus grosse caméra jamais embarquée sur une sonde spatiale. Sa résolution spatiale au sol atteint 30 cm depuis une altitude de 300 km. Le détecteur est constitué de 14 capteurs CCD de 2 048 x 128 pixels, dont 10 comportent un filtre rouge et les quatre autres un filtre bleu, vert et proche infrarouge. Elle prend des clichés dans trois bandes de couleurs : en bleu-vert, en rouge et dans l'infrarouge. Pour faciliter la cartographie de sites potentiels d'atterrissage, la caméra HiRISE peut produire des images stéréo. On peut ainsi estimer le relief d'un site avec une précision de 0,25 m. La masse de l'instrument a pu être limitée à 65 kg en utilisant pour sa structure du plastique à renfort fibre de carbone et des miroirs en verre allégé. Chaque image à haute résolution a une taille de 28 mégabits[10].
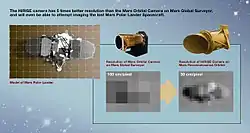 Comparaison de la résolution de la caméra HiRISE de MRO, avec celle de son prédécesseur, MGS
Comparaison de la résolution de la caméra HiRISE de MRO, avec celle de son prédécesseur, MGS La caméra HiRISE.
La caméra HiRISE. La caméra HiRISE est préparée avant d'être rattachée à la sonde.
La caméra HiRISE est préparée avant d'être rattachée à la sonde.
CTX
CTX ou Context Imager (« caméra de contexte ») fournit des clichés monochromes, pouvant couvrir jusqu'à 40 km de largeur, avec une résolution de 8 mètres par pixel. L'instrument CTX doit fonctionner de manière synchrone avec les deux autres caméras présentes sur la sonde, pour fournir des cartes permettant de replacer les images d'HiRISE et de MARCI dans leur contexte global[11].
MARCI
La caméra MARCI (acronyme de Mars Color Imager) fournit des images dans 5 bandes de couleurs visibles, et dans deux bandes ultraviolettes. MARCI est utilisée pour réaliser une carte globale de Mars afin de caractériser les variations journalières, saisonnières et annuelles du climat martien. MARCI permet de produire des bulletins météo journaliers[12].
CRISM
Le spectromètre imageur CRISM (acronyme de Compact Reconnaissance Imaging Spectrometers for Mars) observe dans l'infrarouge et la lumière visible. Il produit des cartes détaillées de la minéralogie de la surface martienne. Cet instrument a une résolution de 18 mètres à une distance orbitale de 300 km. Il opère dans des longueurs d'onde comprises entre 400 et 4 050 nm, mesurant leur spectre grâce à 560 canaux de 6,55 nm de largeur chacun[13].
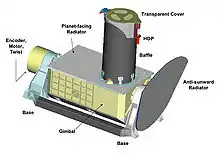
MCS

Le radiomètre MCS (Mars Climate Sounder) analyse l'atmosphère martienne sur 9 bandes de fréquence, dont un canal allant du proche ultraviolet au proche infrarouge (0,3 à 3 µm) et huit canaux dans l'infrarouge moyen (12 à 50 µm). Les différents canaux permettent à l'instrument de mesurer la température, la pression, la vapeur d'eau et les niveaux de poussière sur toute l'épaisseur de l'atmosphère entre le sol et une altitude de 80 km. Il observe le limbe de l'atmosphère. L'instrument est monté sur un double cardan qui lui permet de disposer de deux degrés de liberté. Le MCS permet de distinguer les caractéristiques des couches de l'atmosphère avec une résolution verticale de 5 km. Les mesures effectuées sont assemblées pour réaliser des cartes journalières et globales de la température montrant les variations spatiales et temporelles de l'atmosphère de Mars dans le but d'établir un modèle de circulation global de l'atmosphère martienne. MCS permet de suivre l'évolution des calottes polaires en déterminant les propriétés des glaces et en mesurant la température de leur surface. MCS a une masse de 8 kg et comprend deux télescopes de 4 cm d'ouverture avec une focale de f/1,7. L'instrument a déjà été embarqué sur deux sondes spatiales - Mars Observer puis Mars Climate Observer (sous l'appellation PMIRR (Pressure Modulator Infrared Radiometer) - mais n'a retourné aucun résultat du fait de la perte de ces deux engins[14].
SHARAD
SHARAD (Shallow Subsurface Radar) est un radar de deuxième génération qui doit sonder le sous-sol de la planète en complétant la couverture du radar MARSIS embarqué à bord de Mars Express. La présence de l'instrument est en grande partie liée à la découverte des ravines par Mars Global Surveyor dont la formation pourrait être liée à la présence de nappes d'eau situées à quelques centaines de mètres de profondeur, soit à la fonte de dépôts riches en glaces d'eau. Or, le radar MARSIS est optimisé pour déterminer la structure de la surface de la planète à quelques kilomètres de profondeur et ne fournit à ce titre pas d'informations utilisables pour les couches superficielles à quelques centaines de mètres du sol. SHARAD émet des ondes à plus haute fréquence que MARSIS (centrée sur 20 MHz avec une largeur de bande de 10 MHz) et est, lui, optimisé pour analyser le premier kilomètre d'épaisseur avec une résolution verticale de 15 mètres et une résolution spatiale de 0,3-1 km le long de la trace au sol du satellite) par 3-6 km. Il permet également d'analyser les dépôts sédimentaires comme ceux trouvés dans les régions des calottes polaires martiennes de Terra Meridiani, de Candor Chasma ou du cratère Holden, les vallées fluviales, les cratères enfouis et les complexes volcaniques. L'instrument est fourni par l'Agence spatiale italienne avec une participation américaine[15],[16],[17].
| Instrument | Type | Caractéristiques | Objectifs scientifiques | Responsable instrument |
|---|---|---|---|---|
| CRISM | Spectromètre imageur | Largeur fauchée 11 km Résolution spatiale 20 m/pixel 514 bandes spectrales entre 0,4 et 4 microns Résolution spectrale 7 nm | Composition et morphologie régionales et locales de la surface | Scott Murchie Applied Physics Laboratory Université Johns-Hopkins |
| CTX | Caméra | Largeur fauchée 30 km Image panchromatique (moins le bleu) Résolution spatiale 6 m/pixel | Morphologie et stratigraphie régionale | Michael Malin Université de l'Arizona |
| HiRISE | Caméra à haute résolution | Largeur fauchée 6 km rouge) et 1,2 km (bleu, vert) Image couleur Résolution spatiale 0,3 à 1 m/pixel | Processus géologiques et stratigraphiques Morphologie | Alfred MacEwen Université de l'Arizona |
| MARCI | Caméra grand angle | Nuages atmosphériques, brouillards, ozone et albédo de la surface 7 bandes spectrales (0,28 à 0,8 micron) | Météorologie planétaire Modifications en surface | Michael Malin Malin Space Science Systems |
| MCS | Sondeur atmosphérique | Profil température, eau, poussière, CO2 Couverture verticale de 0 à 80 km Résolution verticale 5 km Balance de la radiance aux pôles | Structure de l'atmosphère Processus polaires | Daniel JM Cleese Jet Propulsion Laboratory |
| SHARAD | Radar | Sondage jusqu'à 1 km de profondeur Résolution verticale 10 à 20 m Résolution spatiale 1 x 5 km | Structure terrain jusqu'à 1 km de profondeur | Roberto Seu Agence spatiale italienne |
Étude du champ de gravité
Les variations du champ gravitationnel martien peuvent engendrer des variations de vitesse pour la sonde MRO. La vélocité de la sonde sera mesurée en utilisant le décalage Doppler de l'orbiteur, dont le signal est renvoyé vers la Terre[19].
Étude de la structure de l'atmosphère martienne
Des accéléromètres très sensibles sont intégrés à l'orbiteur. Ils permettent de déterminer par déduction la densité atmosphérique. On ne sait pas encore si cette expérience se déroulera uniquement durant la phase de freinage atmosphérique (lorsque MRO est située à une altitude plus basse, dans des zones plus denses de l'atmosphère), ou durant toute la mission[20].
Démonstrations technologiques
Electra
Electra est un émetteur radio UHF à haute fréquence conçu pour communiquer avec les engins spatiaux fixes ou mobiles situés à la surface de Mars, tels que l'astromobile Curiosity, l'atterrisseur InSight, etc. Grâce à Electra, l'arrivée et la localisation de sondes sur Mars sont plus précises[21].
Caméra de navigation optique
La caméra de navigation optique prendra des clichés des lunes de Mars, Phobos et Déimos avec les étoiles en arrière-plan, afin de déterminer l'orbite de MRO avec plus de précision. Cette expérience n'est pas indispensable au bon fonctionnement de la mission, elle a été incluse pour que les ingénieurs puissent tester de nouvelles techniques de repérage dans l'espace. Les insertions en orbite et les atterrissages des sondes peuvent être plus précis[22].
Utilisation de la bande Ka
Le système de télécommunications standard pour les échanges de données entre les sondes spatiales et la Terre repose sur l'utilisation de la bande X. MRO est la première mission spatiale à transmettre ses données de manière opérationnelle en utilisant la bande Ka. Celle-ci permet de transmettre des données avec un débit nettement supérieur[23].
Déroulement de la mission
MRO conduit sa mission scientifique durant une première période de deux années, après s'être placée sur une orbite circulaire grâce à la technique de l'aérofreinage mise au point par la NASA. Il s'agit de ralentir progressivement le vaisseau en abaissant l'orbite du vaisseau à son apogée de manière que celui-ci traverse la haute atmosphère de Mars. La trainée générée est utilisée pour abaisser progressivement l'orbite jusqu'à ce que l'orbite visée soit atteinte. La mission scientifique proprement dite n'a commencé que lorsque tous les tests techniques ont été effectués (en ). Après ses deux années de mission, la sonde a continué ses observations scientifiques, tout en jouant le rôle de relais de communication pour les engins spatiaux posés à la surface de Mars.
Lancement et transit vers Mars (août 2005 à mars 2006)

Le lancement de MRO, initialement prévu le , est reporté à deux reprises, à la suite d'incidents techniques (notamment à cause d'un problème mineur sur l'étage Centaur de la fusée Atlas V. La sonde est finalement lancée avec succès, le vendredi depuis la base de lancement de Cape Canaveral par une fusée Atlas V, équipée de l'étage supérieur Centaur. MRO a navigué dans l'espace durant sept mois avant d'atteindre Mars. Quatre corrections de trajectoire pouvaient être éventuellement réalisées, afin que la sonde puisse effectuer sans problème son insertion orbitale une fois arrivée au plus près de Mars.
L'insertion orbitale se produisit lorsque la sonde MRO se rapprocha de Mars, pour la première fois le . La sonde passa sous l'hémisphère sud de la planète, à une altitude comprise entre 370 et 400 kilomètres (190 miles). Les six moteurs principaux de la sonde brûlèrent leur carburant durant 27 minutes, afin de réduire la vitesse de la sonde de 2 900 m/s (6 500 miles par heure) à 1 900 m/s (4 250 miles par heure). Cette insertion orbitale plaça la sonde sur une orbite polaire très elliptique. Le périapse, c’est-à-dire le point où la sonde se rapproche le plus de la surface, est de 300 kilomètres (180 miles). L'apoapse, le point le plus distant de la surface, est de 45 000 kilomètres (28 000 miles). La sonde met alors 35 heures pour effectuer une orbite complète.
Phase d'aérofreinage (mars à novembre 2006)
L'aérofreinage commença peu après cette insertion orbitale, pour donner à la sonde une orbite plus basse et plus rapide. Ce freinage permet d'économiser du carburant (presque 50 %). Le freinage atmosphérique se déroula en trois étapes :
- MRO abaissa progressivement son périapse en utilisant ses moteurs. L'altitude idéale du freinage atmosphérique fut déterminée le moment venu, elle dépendait de la finesse de l'atmosphère (rappelons que la pression atmosphérique varie selon les saisons sur Mars). Cette première étape fut réalisée en cinq orbites, soit une semaine terrestre ;
- MRO resta ensuite à une altitude suffisamment basse pour utiliser le freinage atmosphérique durant cinq mois et demi, soit moins de 500 orbites. Les ingénieurs de la NASA utilisèrent les moteurs de la sonde pour effectuer des corrections occasionnelles du périapse, afin que la sonde ne se désintègre pas dans l'atmosphère ténue. Grâce à ce freinage, l'apoapse devrait être réduite à 450 kilomètres (280 miles) ;
- pour terminer la séquence de freinage atmosphérique, la sonde MRO utilisa ses propulseurs pour que son périapse soit situé hors de l'atmosphère martienne (à la fin du mois d').
Après cette phase de freinage, les ingénieurs effectuent des ajustements supplémentaires de l'orbite, durant une ou deux semaines, grâce aux moteurs. Ces corrections s'effectuent avant une conjonction solaire qui a eu lieu entre le et le . En effet, à cette période, Mars est passée derrière le Soleil pour les observateurs terrestres. Après cette phase de freinage atmosphérique, les opérations scientifiques ont commencé. L'orbite de travail oscille entre 255 kilomètres (au-dessus du pôle Sud) et 320 kilomètres (au-dessus du pôle Nord de Mars)[24].
Phase d'étude scientifique

Mission primaire (novembre 2005 à novembre 2008)
Les opérations scientifiques se déroulent durant une période nominale de deux ans. Après cela, la mission étendue a débuté. La sonde Mars Reconnaissance Orbiter a collecté des données pour préparer les missions suivantes de la NASA notamment l'atterrisseur Phoenix, lancé en 2007 et le rover de Mars Science Laboratory, lancé en 2011. Les caméras de MRO ont permis de choisir les sites d'atterrissage les plus propices pour ces robots, en permettant de trouver le meilleur compromis entre risques et résultats scientifiques. Les capacités particulièrement importantes de la sonde MRO en tant que relais de transmissions des données entre Mars et la Terre jouent un rôle essentiel pour les missions présentes au sol. MRO a également pu fournir des données importantes durant les phases d'atterrissage des rovers MER et MSL.
Le , la caméra HiRISE parvient à photographier la sonde spatiale Phoenix alors qu'elle descend accrochée sous son parachute vers le site d'atterrissage situé dans la région de Vastitas Borealis[25].
Extensions de mission (novembre 2008 -)
La sonde spatiale achève sa mission primaire en . La mission de MRO est reconduite pour deux ans avec comme objectif l'étude des changements à la surface de Mars (dunes, cavités à la surface des calottes polaires...)[26]. Le , MRO entre en mode survie pour la troisième fois en 2009 et pour la septième fois depuis son lancement. Elle passe à nouveau en mode survie le et les ingénieurs décident d'interrompre toutes les opérations pour déterminer l'origine de ces incidents à répétition[27]. La sonde spatiale ne redevient opérationnelle que le après qu'un nouvelle version du logiciel embarqué a été téléchargée[28]. En , l'orbiteur dispose encore de 290 kg d'ergols dont 120 kg sont réservés à des manœuvres destinées à accompagner la mission Mars Science Laboratory. MRO consomme environ 10 kg par an ce qui permet d'envisager le prolongement de sa mission au-delà de 2020. Durant l'été 2011, un des 14 CCD de la caméra HiRISE tombe en panne ce qui réduit la largeur de la fauchée de 6 km à 5,4 km[26]. Trois ans après avoir photographié Phoenix, MRO renouvelle son exploit le pour l'atterrissage de Mars Science Laboratory[29].
Mesures prises pour prolonger la mission jusqu'à la décennie 2020
La NASA a besoin de disposer durant la décennie 2020 de plusieurs orbiteurs martiens, pour pouvoir relayer les données collectées par ses rovers qui travaillent à la surface (Mars 2020, Curiosity...). Or les engins disponibles, notamment MRO, sont vieillissants. L'agence spatiale américaine a décidé, au début de l'année 2018 de prendre des mesures pour prolonger au maximum la vie de MRO, notamment pour garantir la retransmission des données de . Le contrôle d'attitude de MRO repose en mode de fonctionnement normal sur une centrale à inertie, dont elle emporte deux exemplaires. Le premier exemplaire, arrivé en fin de vie après 58 000 heures d'utilisation, a été remplacé il y a plusieurs années par l'unité de secours, qui compte début 2018 52 000 heures d'utilisation. Pour préserver cette dernière, arrivée presque au bout de son potentiel théorique et qui reste indispensable pour les corrections orbitales, le mode survie ou des manœuvres exceptionnelles liées par exemple à l'arrivée d'un nouvel engin spatial, la NASA a décidé d'utiliser en fonctionnement normal le viseur d'étoiles à la place de la centrale à inertie. Cet équipement utilise une caméra pour identifier les étoiles dans son champ de vue et déterminer l'orientation de l'engin spatial.
Les deux batteries constituent un autre élément critique de MRO, également menacées de panne. Celles-ci sont sollicitées à chaque fois que la planète Mars s'interpose entre le Soleil et MRO, soit environ 40 minutes durant chaque orbite de deux heures. Pour prolonger leur durée de vie, il a été décidé d'augmenter leur charge, de mettre en marche les résistances chauffantes — chargées de maintenir la température de l'engin spatial dans des plages correctes lorsqu'il passe dans l'ombre de Mars — avant cette phase, pour réduire l'utilisation de la batterie durant l'éclipse et enfin de modifier l'orbite de MRO pour réduire la durée du passage sur le côté nuit de la planète. Ce changement de l'orbite, consistant à reculer l'heure de passage au-dessus de l'équateur, a un impact sur les observations : réduction de la durée des périodes de l'année où les pôles peuvent être observés, réalisation et interprétation plus difficile des observations d'un même site pour détecter les changements. Le vieillissement a d'ores et déjà mis hors service début 2018 l'un des deux spectromètres CRISM, dont le fonctionnement nécessite un cryorefroidisseur : les trois équipements de ce type ont été mis hors service [30].
Galerie
- Écoulements
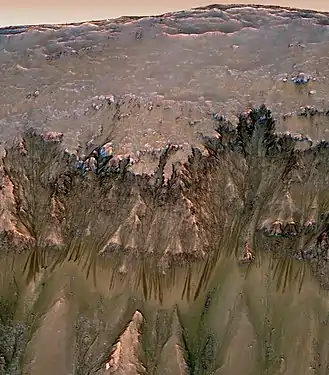 Traces d'écoulements observées par l'instrument HiRISE.
Traces d'écoulements observées par l'instrument HiRISE.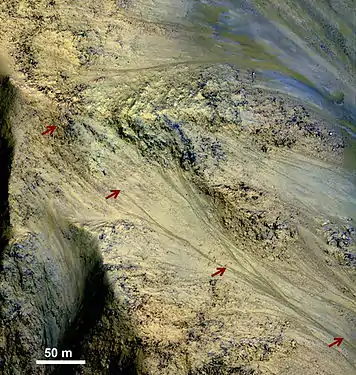 Traces linéaires sur la pente martienne.
Traces linéaires sur la pente martienne.
- Traînées noires
 Traînées noires photographiées le par l'instrument HiRISE de MRO dans la région d'Acheron Fossae.
Traînées noires photographiées le par l'instrument HiRISE de MRO dans la région d'Acheron Fossae.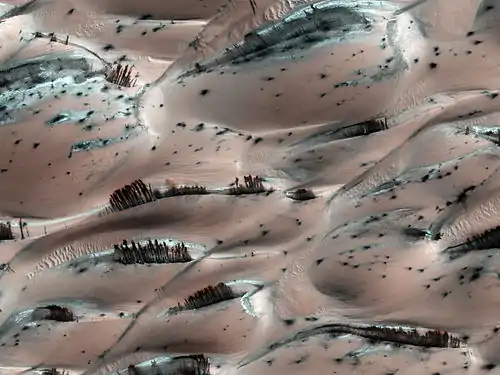 Lorsqu'elles prennent naissance sur la crête des dunes martiennes, les traînées noires donnent l'illusion, à faible résolution, de rangées d'arbres éparses au milieu de buissons. Photo prise au nord d'Utopia Planitia, en lisière de la calotte polaire boréale.
Lorsqu'elles prennent naissance sur la crête des dunes martiennes, les traînées noires donnent l'illusion, à faible résolution, de rangées d'arbres éparses au milieu de buissons. Photo prise au nord d'Utopia Planitia, en lisière de la calotte polaire boréale.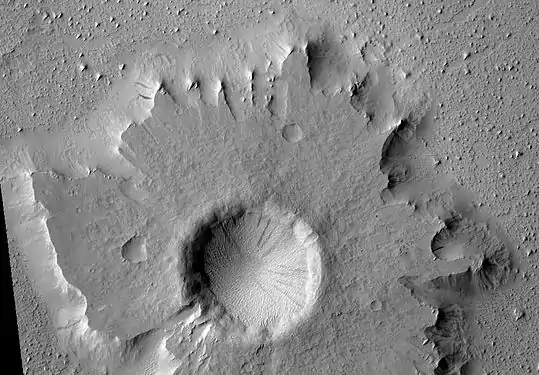 Cratère à piédestal présentant des traînées sombres au sud-ouest d'Amazonis Planitia.
Cratère à piédestal présentant des traînées sombres au sud-ouest d'Amazonis Planitia.
- Phénomènes météorologiques
 Traînées laissées par des tourbillons de poussière.
Traînées laissées par des tourbillons de poussière.
- Champs de dunes


- Divers
 Cratère d'impact de 30 mètres de diamètre récent (moins de 3 ans) photographié en par la caméra HiRISE.
Cratère d'impact de 30 mètres de diamètre récent (moins de 3 ans) photographié en par la caméra HiRISE. Avalanche déclenchée par le dégel dans la calotte polaire et photographiée en . Le nuage de débris fait environ 200 mètres de long et la falaise a une hauteur de 700 mètres et pente d'environ 60°. Sa partie supérieure est couverte de dioxyde de carbone gelé.
Avalanche déclenchée par le dégel dans la calotte polaire et photographiée en . Le nuage de débris fait environ 200 mètres de long et la falaise a une hauteur de 700 mètres et pente d'environ 60°. Sa partie supérieure est couverte de dioxyde de carbone gelé. Strates sur les pentes de Chasma Boreale, vallée qui s'enfonce dans la calotte polaire. L'image fait 1 km de droite à gauche et la dénivelée est également de 1 km
Strates sur les pentes de Chasma Boreale, vallée qui s'enfonce dans la calotte polaire. L'image fait 1 km de droite à gauche et la dénivelée est également de 1 km
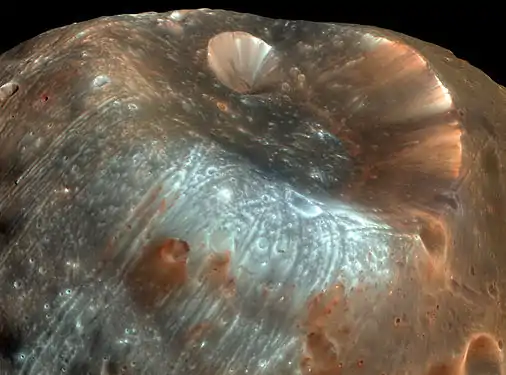
- Lunes martiennes


Notes et références
- Rocard 2003-2006, p. 139-140
- (en) « Science summary », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Science Goal 1: Determine if Life Ever Arose On Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Goal 2: Characterize the Climate of Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Goal 3: Characterize the Geology of Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « Goal 4: Prepare for the Human Exploration of Mars », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- (en) « MO > Mission > Science > Objectives », sur NASA JPL, Jet Propulsion Laboratory (consulté le ).
- Ulivi et Harland 2014, p. 213-218
- Rocard 2003-2006, p. 141
- (en) « Mars Reconnaissance Orbiter - High Resolution Imaging Science Experiment (HiRISE) », sur NASA NSSDC Master Catalog, NASA (consulté le )
- (en) « Mission > Instruments > CTX Context Camera », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Mission > Instruments > MARCI Mars Color Imager », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Mars Reconnaissance Orbiter - Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) », sur NASA NSSDC Master Catalog, NASA (consulté le )
- (en) « Mars Reconnaissance Orbiter - Mars Climate Sounder (MCS) », sur NASA NSSDC Master Catalog, NASA (consulté le )
- Rocard 2003-2006, p. 143-144
- (en) « Mission > Instruments > SHARAD Shallow Radar », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Missions and Projects > Solar system exploration > SHARAD », sur Agence spatiale italienne, Jet Propulsion Laboratory (consulté le )
- Graf et Zurek 2001, p. 3.
- (en) « Mission > Instruments > Gravity Field », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Mission > Instruments > Accelerometers », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Mission > Instruments > Electra », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Mission > Instruments > Optical Camera », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) « Mission > Instruments > Ka-band », sur NASA JPL, Jet Propulsion Laboratory (consulté le )
- (en) Mars Reconnaissance Orbiter Nears End of Aerobraking - Communiqué de presse de la NASA, 25 août 2006
- (en) Eric Hand, « Planetary science: Stranger in a strange land », Nature, no 753, , p. 712-713 (lire en ligne)
- Ulivi et Harland 2014, p. 235
- (en) « Orbiter in Safe Mode Increases Communication Rate », NASA/JPL,
- (en) « Spacecraft Out of Safe Mode », NASA/JPL,
- (en) Emily Lakdawalla, « Mars Reconnaissance Orbiter HiRISE has done it again!! », The Planetary Society,
- (en) Emily Lakdawalla, « Maintaining the health of an aging Mars orbiter », The Planetary Society,
Annexes
Bibliographie
- NASA documents liés à la mission
- (en) NASA, Mars Reconnaissance Orbiter Launch press kit, (lire en ligne)Dossier de presse fourni par la NASA pour le lancement de MRO
- (en) NASA, Mars Reconnaissance Orbiter Arrival, (lire en ligne)Dossier de presse fourni par la NASA pour l'insertion en orbite de MRO
- (en) James E. Graf, Richard W. Zurek et al., « The Mars Reconnaissance Orbiter Mission IAC-05-A.3.3 », IAC, , p. 1-11 (lire en ligne [PDF]) Présentation générale de la mission.
- (en) Richard W. Zurek et Suzanne E. Smrekar, « An overview of the Mars Reconnaissance Orbiter (MRO) science mission », Journal of Geophysical Research, vol. 112, no E05S01, , p. 23291–23316 (DOI 10.1029/2006JE002701, lire en ligne [PDF]) Présentation générale de la mission et des enjeux scientifiques.
- (en) Jim Taylor et al., Mars Reconnaissance Orbiter Telecommunications, Jet Propulsion Laboratory (NASA), coll. « DESCANSO Design and Performance Summary Series », (lire en ligne [PDF])
- Ouvrages de synthèse sur l'exploration de Mars
- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2)
- (en) Peter J. Westwick, Into the black : JPL and the American space program, 1976-2004, New Haven, Yale University Press, , 413 p. (ISBN 978-0-300-11075-3) — Histoire du Jet Propulsion Laboratory entre 1976 et 2004
- (en) Erik M. Conway, Exploration and engineering : the Jet propulsion laboratory and the quest for Mars, Baltimore, Johns Hopkins University Press, , 418 p. (ISBN 978-1-4214-1605-2, lire en ligne) — Histoire du programme d'exploration martien du Jet Propulsion Laboratory
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9)
- Francis Rocard, Planète rouge : dernières nouvelles de Mars, Paris, Dunod, coll. « Quai des Sciences », 2003-2006, 2e éd., 257 p. (ISBN 978-2-10-049940-3 et 2-10-049940-8)
- Description des instruments scientifiques - Résultats scientifiques - articles des concepteurs des instruments
- (en) Roberti Seu et al., « SHARAD sounding radar on the Mars Reconnaissance Orbiter », Journal of Geophysical Research, vol. 112, no E05S05, , p. 23291–23316 (DOI 10.1029/2006JE002745, lire en ligne [PDF]) Présentation du radar Sharad.
- (en) D. J. McCleese, J. T. Schofield et al., « Mars Climate Sounder: An investigation of thermal and water vapor structure, dust and condensate distributions in the atmosphere, and energy balance of the polar regions », Journal of Geophysical Research, vol. 112, no E05S06, , p. 23291–23316 (DOI :10.1029/2006JE002790, lire en ligne [PDF]) Description de l'instrument MCS.
- (en) Alfred S. McEwen, Maria E. Banks et al., « The High Resolution Imaging Science Experiment (HiRISE) during MRO’s Primary Science Phase (PSP) », Icarus, vol. 205, no 1, (DOI 10.1016/j.icarus.2009.04.023) Description de la caméra HiRISE et resultats à l'issue de la mission primaire.
- (en) Alfred S. McEwen, Maria E. Banks et al., « The High Resolution Imaging Science Experiment (HiRISE) during MRO’s Primary Science Phase (PSP) », Icarus, vol. 205, no 1, (DOI 10.1016/j.icarus.2009.04.023) Description de la caméra HiRISE et resultats à l'issue de la mission primaire.
- (en) S. Murchie, R. Arvidson et al., « Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) on Mars Reconnaissance Orbiter (MRO) », Journal of Geophysical Research, vol. 112, no E05S03, , p. 1-57 (DOI 10.1029/2006JE002682, lire en ligne [PDF]) Description du spectromètre CRISM.
- (en) Michael C. Malin, James F. Bell III et al., « Context Camera Investigation on board the Mars Reconnaissance Orbiter », Journal of Geophysical Research, vol. 112, no E05S04, , p. 1-25 (DOI 0.1029/2006JE002808, lire en ligne [PDF]) Description de la caméra Context.
Articles connexes
- Mars
- Exploration spatiale de Mars
- Exploration de Mars
- Mars Global Surveyor : mission ayant précédé MRO en jouant un rôle similaire
- Mars Exploration Rover
- Techniques spatiales
Liens externes
- (en) Site officiel de la mission MRO sur le site du centre JPL de la NASA
- (en) Dossier de presse de la NASA fourni pour le lancement de la sonde
- (en) Description de la mission dans le catalogue des missions tenu par la NASA
- (fr) Descriptif de la mission MRO sur le site de Philippe Labro
- (fr) Dossier consacré à MRO sur le site Futura-Sciences (description des instruments et de la mission)
 Portail de l’astronautique
Portail de l’astronautique  Portail de la planète Mars
Portail de la planète Mars