Architecture des moteurs à pistons
L'architecture des moteurs à piston définit, entre autres, la position des cylindres. Il peut s'agir de moteurs à explosion, de moteurs hydrauliques ou de systèmes pneumatiques.
Architectures « classiques »
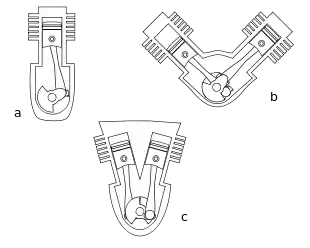
Cylindres en ligne
Les cylindres sont placés les uns à côté des autres. Dans l'industrie automobile, les moteurs de petite cylindrée sont souvent des moteurs avec cylindres en ligne. Depuis plus de 30 ans, les moteurs à quatre cylindres en ligne sont devenus la norme dans l'industrie automobile. Ces moteurs sont réputés pour leur douceur de fonctionnement.
Cylindres en V
Les cylindres sont alignés en deux rangs décalés d'un certain angle (de 15 à 135°[1]), ce qui raccourcit considérablement la longueur du moteur par rapport à une architecture en ligne. La majorité des moteurs à six cylindres et plus, produits en 2005, étaient en V. Une nouvelle technologie consiste en la désactivation d'une rangée de cylindres : celle-ci est mise hors service lorsque le véhicule n'a pas besoin de toute la puissance.
Un moteur en V peut être plus ou moins droit ou couché. Lorsque l'angle est de 90° et qu'un des deux cylindres est à l'horizontale, on parle volontiers de « cylindres en L », sans que le moteur soit vraiment différent d'un moteur en V.
Exemples de moteurs en V montés sur des motocyclettes : Ducati 90° axe transversal, Moto Guzzi 90° axe longitudinal à air, Voxan 72° axe transversal, refroidi par eau, Harley-Davidson et Buell 45° axe transversal refroidi par air.
Cylindres en W
Ils peuvent être :
- À trois cylindres : chaque cylindre est décalé par rapport à l'autre d'un certain angle. Par exemple : angle du 1er par rapport au 2e : 15° ; angle du 3e par rapport au 1er : 30°. Appelé aussi moteur « en éventail ».
- En V : les cylindres des deux lignes sont eux-mêmes disposés en quinconce, permettant de diminuer un peu la longueur du bloc. Exemples : moteur W12, comme le Napier Lion de Napier & Son et le Lorraine 12 E par Lorraine-Dietrich (France, 1924) qui équipait le Potez 25 ou l'Oiseau blanc ; Bugatti Veyron 16.4 et son W16.
Cylindres en H
Le moteur en H est tout simplement la superposition de deux moteurs à plat avec leurs carters d'huile mis en commun mais avec deux vilebrequins.
Exemple : moteur Napier Sabre II à 24 cylindres, équipant notamment le Hawker Tempest et développant une puissance de 2 130 chevaux[2].
Cylindres en U
Le moteur en U est un assemblage de deux moteurs en ligne dont les vilebrequins ont été reliés par l'intermédiaire d'un engrenage ou de chaînes. Le concept de moteur en U a été étudié par Matra pour sa Bagheera dont deux prototypes, dénommés « U8 », ont été dotés d'un assemblage de deux moteurs Simca.
Pour que le montage soit possible, il faut que les deux moteurs aient leur culasses inversées l'une par rapport à l'autre pour que le côté admission (ou échappement) de chacun soit au centre du U. Dans le cas de la U8, deux versions du 1 294 cm3 Simca ont été utilisées : celle de la Simca 1000 Rallye et l'autre de la Simca 1100 ti.
On retrouve aussi un moteur en U sur les locomotives françaises CC 65500.
Cylindres en étoile
Les cylindres sont répartis radialement autour du vilebrequin. Utilisé pour des moteurs d'avions et certains moteurs de motos (Megola, etc.).
Ces moteurs peuvent être rotatifs, l'ensemble des cylindres constituent alors le volant d'inertie.
Cylindres opposés horizontalement ou à plat
Les cylindres sont opposés et à l'horizontale. Parfois appelés « Boxer », ces moteurs permettent d'abaisser le centre de gravité des voitures. Les pistons se déplaçant dans un même plan horizontal mais dans des directions opposées, les forces d'inertie du premier et du second ordre sont équilibrées. Par contre dans un bicylindre, les couples d'inertie du premier et du second ordre ne sont pas équilibrés en raison du fait que les cylindres opposés ne sont pas dans le même plan transversal. Dans le cas d'un 4-cylindres, tant les forces que les couples d'inertie du premier ordre sont équilibrés[3].
Exemples
- Voitures Panhard (deux, quatre et six cylindres) et véhicules militaires EBR et AML (douze-cylindres)
- Citroën 2 CV (et Dyane, Acadiane, Méhari, Ami 6 et Ami 8, LN et LNA pour les deux-cylindres ; Citroën GS et GSA, Axel, Ami Super pour les quatre-cylindres) ;
- « Coccinelle » et Combi Volkswagen ;
- Porsche 911 et son « Flat-six » depuis 1963; Porsche Boxster (quatre ou six-cylindres); Porsche 356 (quatre-cylindres); Porsche 917 (douze ou seize-cylindres)
- Ferrari Testarossa et son douze-cylindres à plat de 5 litres ; Ferrari Berlinetta Boxer (douze-cylindres)
- Subaru Impreza et Forrester (quatre-cylindres) ; Outback et Legacy (quatre ou six-cylindres)
- Alfa Romeo (de l'Alfasud à l'Alfa 145 et 146) (quatre-cylindres);
- Tucker '48 moteur Franklin O-335 (en) (six cylindres d'hélicoptère Bell)
- Motos BMW (deux-cylindres) et Honda Gold Wing (quatre et six-cylindres) ;
- la plupart des moteurs d'avions légers en quatre et six cylindres (ex: Lycoming Engines)
Cylindres en éventail
Les cylindres sont étalés dans un plan. Louis Blériot a traversé la Manche avec un avion muni d'un trois-cylindres en éventail fabriqué par Alessandro Anzani.
Moteur en carré
Il s'agit de moteurs à plusieurs vilebrequins parallèles.
Avantages :
- moins de longueur ;
- possibilité de monter des distributeurs rotatifs sur tous les cylindres (moteurs 2-temps).
Architectures alternatives
L'architecture des moteurs à explosion ou à combustion interne a peu évolué dans son principe depuis le début du XXe siècle. De nombreuses architectures alternatives ont été élaborées avec des succès variés mais pour l'instant limités.
Moteur Wankel
Ce moteur, aussi appelé « moteur à piston rotatif », fut inventé et développé par Félix Wankel, qui vendit ensuite le brevet correspondant.
Moteurs à pistons opposés

Les moteurs à pistons opposés, à deux vilebrequins ou plus, ont eu leur heure de gloire à partir des années 1930. Ils ne se sont révélés efficaces qu'en cycle Diesel 2-temps et n'ont jamais été développés en version essence comme figuré sur cette animation.
Ils ont propulsé des vapeurs (USS Monitor), des sous-marins, des locomotives (Fairbanks-Morse 38D8 1/8 (en)), des chars d'assaut (Leyland L60 et Kharkov Morozov 6TD) et des avions (Junkers Jumo 205). Un système à un seul vilebrequin et culbuteurs a été développé par Sulzer (type ZG) et repris par la société MAP puis par Rootes-Commer sur le TS3[4],[5],[6],[7].
Moteur Napier Deltic

Ces moteurs Diesel de Napier & Son à trois vilebrequins 18 cylindres et 36 pistons ont été produits et exploités dans les années 1950 à 1980 sur des locomotives et des vedettes rapides. Ils nécessitent une soufflante à l'admission pour chasser les gaz brûlés.
Le nom « deltic » vient de leur architecture en lettre Delta (Δ).
L'impossibilité de turbo-compresser fortement l'air d'admission[pourquoi ?] a limité le développement de ces moteurs Diesel à pistons opposés.
Moteur à pistons libres
Dans ce type de moteur, le mouvement du piston répond uniquement à la pression du gaz, sans qu'une bielle(s) ou vilebrequin ne génère une rotation. Les configurations de base des moteurs à pistons libres sont à piston unique, à double pistons, ou à deux pistons opposés.
Ils ont été installés sur des navires de la Marine nationale française à la fin des années 1950, avant d'être retirés du service, et dans des centrales électriques où ils entrainent des turbines à gaz. À allumage spontané comme les Diesel, les moteurs à pistons libres permettent l'utilisation de carburants peu raffinés (type fioul, ou autres ; comme les huiles végétales ou d'origine animale).
Moteur Quasiturbine
Il s'agit d'un moteur à piston purement rotatif entrainant directement l'axe moteur, sans le mouvement radial des moteurs Wankel. Le rotor Quasiturbine est constitué de quatre pièces (pales) articulées. Il n'y a pas eu de prototype à combustion interne jusqu'à présent.
Historique
Le premier moteur à « cycle composé quatre temps sans soupapes » (appelé parfois « à six temps »), a été créé par Giovanni Cargnelutti à Ospedaletto di Gemona (province d'Udine, Italie) durant l'entre-deux-guerres. Il a été baptisé « Centauro » par son inventeur. L'entreprise familiale Officine Meccaniche Valentino Cargnelutti, fondée par son père, a construit trois prototypes de motos et les a équipés avec des moteurs de 125 et 175 cm3[8].
Fonctionnement
La combinaison des cycles est obtenue au moyen de deux éléments moteurs travaillant selon deux cycles différents. La chambre d'explosion est unique. Il y a deux cylindres en tandem et deux pistons de diamètres différents. Le piston qui a le plus gros diamètre se déplace à un régime double de celui du piston de plus faible alésage. Le premier fonctionne selon le cycle à quatre temps, le second selon le cycle à deux temps[8].
L'aspiration se produit quand le piston de l'élément à quatre temps se déplace à partir du point mort haut. Pendant ce temps, le piston de l'élément à deux temps accomplit la moitié de sa course à partir du point mort bas. Par suite de la différence du diamètre des deux pistons, il se produit une dépression qui est comblée par les gaz qui arrivent par la lumière découverte par le piston et le distributeur rotatif.
Quand le mouvement inverse se produit pour le piston de l'élément à quatre temps nous avons le temps de compression au cours duquel le piston de l'élément à deux temps achève sa course et a masqué la lumière d'admission. Au temps de travail, les deux pistons se meuvent vers leur point mort inférieur. Au moment où le piston de l'élément à quatre temps est au point inférieur, le piston de l'élément à deux temps arrive seulement au milieu de sa course et démasque la lumière d'échappement. La remontée du piston de l'élément à quatre temps aide à l'expulsion des gaz.
Avantages
C'est d'abord la prolongation des phases d'admission et d'échappement. La commande desmodromique assure la possibilité de tourner à des régimes très élevés. Le rendement thermique est excellent, les gaz se détendent dans un plus grand espace que celui d'un quatre-temps classique et pendant un temps plus long et en outre une bonne partie de l'énergie, consommée au temps d'admission et à celui d'échappement se trouve récupérée.
Moteur Crower à six temps
Un moteur à six temps, dont les deux derniers temps sont faits avec de la vapeur produite par la chaleur des cylindres et pistons.
Autres architectures
Des architectures plus complexes ont été ou sont étudiées, pour certaines expérimentées, sans perspective d'industrialisation pour l'instant.
Moteurs à compression variables
En anglais : « Variable Compression Ratio » ou VCR.
Afin d'augmenter le rendement à régimes et charges intermédiaires, divers systèmes permettant de faire varier le taux de compression du moteur ont été étudiés depuis les années 1930. Les contraintes imposées par les différents systèmes, qui impliquent généralement des déplacements de parties importantes du moteur ont empêché la généralisation de la compression variable[9].
Un nouveau type de compression variable est actuellement en cours d'industrialisation avec le moteur MCE-5. Le principe utilisé qui n'implique aucun déplacement du vilebrequin ou des cylindres offre le gros avantage d'annuler les efforts latéraux sur les pistons, ce qui permet un gain supplémentaire important de rendement.
Le moteur Dynacam
C'est un moteur en barillet avec un arbre central dont les archives ne sont plus accessibles sur Internet. Les droits avaient été repris par la société Axial Vector engines[10], avant la disparition de cette dernière en 2012.
Le moteur Revetec
Un moteur à combustion contrôlée (en anglais : « controlled combustion engine », ou CCE) est un terme utilisé par la société Revetec pour caractériser un type de moteur à explosion conçu par Brad Howell-Smith. Il utilise deux cames contrarotatives à la place d'un vilebrequin. Les paires de cylindres sont opposées dans une disposition à plat ou en « X ».
Notes et références
- (en) Are eight cylinders enough? - Popular Mechanics, janvier 1972, page 176
- Coupe du moteur Napier-Sabre II - MotorLexikon.com
- Technique : Le moteur boxer - MotorLegend.com, .
- Les moteurs sans soupapes - Auto-innovations.com
- moteur à pistons opposés et cylindres opposés - Auto-innovations
- Cf. « Le Diesel multivilebrequin à pistons opposés », sur Histomobile.com
- <Cf. Jean-Pierre Pirault et Martin Flint, Opposed Piston Engines -, SAE International
- Cargnelutti - Moteur à 6 temps ? - Moto-histo.com
- Principe des moteurs VCR
- (en) Axial Vector Engines Corporation (AVEC) - (voir archive, société disparue en 2012)
{kind=link}
Annexes
Articles connexes
- Moteur à combustion et explosion
- Rendement d'un moteur à explosion
- Liste des motoristes aéronautiques par pays
- Moteurs hydrauliques
Liens externes
- L'architecture : nombre et disposition des cylindres
- (de) Flugmotoren (Moteurs d'avions) - Motorlexikon
 Portail de l’automobile
Portail de l’automobile  Portail de la moto
Portail de la moto  Portail des camions
Portail des camions  Portail de l’énergie
Portail de l’énergie  Portail du génie mécanique
Portail du génie mécanique  Portail des technologies
Portail des technologies