Hayabusa 2
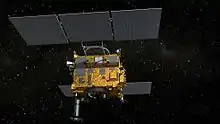
Hayabusa 2 (はやぶさ2, litt. « Faucon pèlerin 2 ») est une mission spatiale de la JAXA, l'agence spatiale japonaise. Lancée le , cette sonde spatiale d'un peu plus de 600 kilogrammes, propulsée par quatre moteurs ioniques, a rejoint l'astéroïde (162173) Ryugu avant de l'étudier entre et . Au cours de son séjour la sonde spatiale a déposé plusieurs petits engins sur le sol qui ont recueilli des données in situ grâce à plusieurs instruments embarqués. Hayabusa 2 a prélevé à deux reprises des échantillons du sol (d'une masse de 5,4g, au lieu des 100 milligrammes escomptés) qui sont ramenés sur Terre pour être analysés. La capsule qui les contient atterrit dans la région désertique de Woomera en Australie le .

| Organisation | JAXA |
|---|---|
| Domaine | Étude de l'astéroïde (162173) Ryugu |
| Type de mission | Retour d'échantillons |
| Statut | Mission étendue |
| Lancement | |
| Lanceur | H-IIA |
| Identifiant COSPAR | 2014-076A |
| Site | Site officiel |
| Assistance gravitationnelle de la Terre | |
| Mise en orbite autour de Ryugu | |
| 21 février 2019 | Collecte premier échantillon |
| 13 novembre 2019 | Départ de Ryugu |
| 5 décembre 2020 | Atterrissage de la capsule sur Terre |
| Juillet 2031 | Mise en orbite autour de 1998 KY26 |
| Masse au lancement | 609 kg |
|---|---|
| Propulsion | Moteur ionique 4 × 10 millinewtons |
| Ergols | Xénon |
| Masse ergols |
60 kg (xénon) 48 kg (hydrazine/MON-3) |
| Δv | > 2 km/s |
| Contrôle d'attitude | Stabilisé 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 2 600 watts (1 ua) |
| Périapside | 0,963 ua |
|---|---|
| Apoapside | 1,146 ua |
| Inclinaison | 5,88° (plan de l'écliptique) |
| ONC | Caméras |
|---|---|
| LIDAR | Altimètre |
| NIRS / TIRS | Spectromètres infrarouges |
| MINERVA II (rovers) | Thermomètre, caméras |
| MASCOT (atterrisseur) | Caméra, magnétomètre, radiomètre, microscope |
Cette mission prend la suite d'Hayabusa lancée en 2003. Cette dernière, malgré de nombreux déboires, était parvenue à ramener une petite quantité de sol d'un astéroïde. Les principales caractéristiques techniques d'Hayabusa 2 sont identiques à celles de son prédécesseur. De taille relativement réduite, la sonde spatiale dispose de caméras, d'un altimètre et de plusieurs spectromètres. Elle se distingue de son prédécesseur par la méthode de collecte des échantillons et l'emport d'un petit atterrisseur MASCOT fourni par les agences spatiales allemande (DLR) et française (CNES). L'astéroïde étudié est de type C, c'est-à-dire susceptible de contenir des matériaux organiques.
Hayabusa 2 est, après Hayabusa, la deuxième mission ayant réussi à ramener des échantillons d'un astéroïde sur Terre. Les données collectées in situ permettront d'améliorer nos connaissances sur le processus de formation et d'évolution du Système solaire. Mais l'objectif principal de la mission est de pouvoir analyser sur Terre un échantillon de sol de l'astéroïde qui permettra, grâce à la puissance des instruments disponibles dans les laboratoires terrestres, d'isoler éventuellement les composants primordiaux du Système solaire que l'astéroïde a théoriquement préservés.
Historique du projet
En 2006, la commission japonaise des activités spatiales accepte de donner une suite à la mission de retour d'échantillons Hayabusa qui était alors en cours. Initialement, les caractéristiques d'Hayabusa 2 devaient être pratiquement identiques à celle de la première sonde spatiale, mais en les responsables du projet annoncent que la nouvelle sonde utilisera une nouvelle méthode pour collecter les échantillons reposant sur l'envoi d'un impacteur. En , alors que la capsule contenant les échantillons prélevés par Hayabusa vient tout juste de réussir son retour sur Terre (fin ), l'agence spatiale japonaise (JAXA) obtient le feu vert du gouvernement pour lancer les développements. Le coût du projet est estimé à 16,4 milliards de yens (environ 200 millions euros). En , l'industriel NEC basé à Tokyo, qui avait déjà réalisé la première sonde spatiale, entame l'assemblage de Hayabusa 2. Le projet rencontre des problèmes de financement et la JAXA se met à la recherche de partenaires. En , les agences spatiales française (CNES) et allemande (DLR) annoncent qu'elles développeront ensemble le petit atterrisseur MASCOT (Mobile Asteroid surface SCOuT) qui doit être déposé par Hayabusa 2 à la surface de l'astéroïde pour analyser son sol[1].
L'astéroïde (162173) Ryugu
La cible de Hayabusa 2 est Ryugu, un astéroïde de type C. Contrairement à l'astéroïde Itokawa visité par la première sonde spatiale qui était de type S, les astéroïdes de type C sont susceptibles de renfermer des matériaux organiques et constituent donc une cible de choix. Ryugu circule sur une orbite semblable à celle de Itokawa et s'approche parfois relativement près de l'orbite terrestre. L'astéroïde est de forme à peu près sphérique avec un diamètre d'environ 875 mètres (à 15 mètres près). Sa période de rotation est de 7,63 heures. Son albédo de 0,047 est faible[2],[3].

Objectifs scientifiques
Hayabusa 2, après s'être placée en orbite autour de l'astéroïde, doit étudier à distance les caractéristiques de celui-ci, puis envoyer un atterrisseur chargé d'effectuer des analyses in situ avant d'effectuer un prélèvement d'échantillon qui doit être ramené sur Terre. La mission Hayabusa 2 a deux objectifs scientifiques :
- l'étude de l'astéroïde à l'échelle macroscopique pour toutes les caractéristiques qui peuvent être mesurées à distance par les instruments de la sonde spatiale : caméras multispectrales, spectromètre proche infra-rouge, imageur thermique infra-rouge, altimètre laser ;
- l'étude de l'astéroïde à l'échelle microscopique à partir des échantillons rapportés sur Terre (moins de 100 milligrammes).
Le petit atterrisseur MASCOT doit permettre d'effectuer une analyse minéralogique in situ du sol de l'astéroïde pour mettre en évidence d'éventuels minéraux hydratés et carbonés. Il doit également fournir le contexte scientifique aux observations effectuées à distance.
Caractéristiques techniques de la sonde spatiale

Hayabusa 2 a des caractéristiques très proches de celles de la sonde Hayabusa qui l'a précédée. Les différences portent principalement sur l'ajout d'une deuxième antenne parabolique grand gain, la modification des moteurs ioniques, l'emport du petit atterrisseur MASCOT développé par l'agence spatiale allemande DLR, le système de collecte d'échantillons qui utilise un impacteur, une roue à réaction supplémentaire pour ajouter une redondance qui avait manqué à la première mission, l'ajout d'un mode de communications en bande Ka plus performant et des modifications apportées aux moteurs ioniques pour accroître leur poussée de 25 % et les rendre plus fiables. Hayabusa 2 reste une sonde spatiale de relativement petite taille avec une masse totale 600 kg (Hayabusa : 510 kg) dont 100 kg d'ergols. Les dimensions de la sonde spatiale passent de 1,0 m × 1,6 m × 1,1 m à 1,0 m × 1,6 m × 1,25 m[4],[5].
Énergie électrique et contrôle thermique
Hayabusa 2 est alimentée en énergie par des panneaux solaires fixes déployés en orbite (envergure 6 mètres) qui fournissent 2,6 kW à 1 Unité Astronomique (U.A.) du Soleil et 1,4 kW à 1,4 U.A. du Soleil (ce qui correspond à la distance la plus lointaine du Soleil atteinte par la sonde spatiale c'est-à-dire l'apogée de l'orbite de l'astéroïde). L'énergie est stockée dans une batterie lithium-ion de 13,2 A-h. Le contrôle thermique est à la fois passif (revêtements isolants multi-couches) et actifs (circuit caloporteur évacuant la chaleur vers des radiateurs situés sur la face à l'ombre de la sonde spatiale). Des résistances sont utilisées pour maintenir à une température minimale les équipements et instruments qui en ont besoin.
Propulsion
Le système propulsif de Hayabusa 2 est à la fois chimique et électrique. La propulsion principale utilise 4 moteurs ioniques ayant une poussée unitaire de 10 millinewtons et utilisant du xénon avec une impulsion spécifique de 2 080 s fournissant un delta-V total de 2 km/s. Trois moteurs peuvent fonctionner simultanément, le quatrième servant de rechange. Les moteurs ioniques accélèrent du xénon contenu dans un réservoir d'une contenance de 51 litres et pouvant contenir 73 kilogrammes de ce gaz. Hayabusa 2 emportant 60 kg de xénon ce qui lui permet de modifier sa vitesse de 2 km/s. Les quatre moteurs sont fixés sur la même face de la sonde spatiale orientables de +/-5 degrés. L'ensemble a une masse de 70 kilogrammes et doit pouvoir fonctionner pendant 18 000 heures au cours de la mission. Les petites corrections de trajectoire et les manœuvres à proximité de la Terre et de l'astéroïde sont effectuées à l'aide de 12 petits propulseurs chimiques brûlant un mélange hypergolique d'hydrazine et de MON-3 et ayant une poussée de 20 newtons répartis en deux sous-ensembles redondants. Ces propulseurs peuvent fonctionner par impulsions brèves pour corriger l'orientation ou en fonctionnant plus longtemps plus longues pour corriger la trajectoire ou désaturer les roues de réaction. Hayabusa 2 emporte 48 kg d'ergols chimiques[5].
Contrôle d'attitude et télécommunications
Le contrôle d'attitude est réalisé à l'aide de quatre roues de réaction, deux viseurs d'étoiles, deux centrales à inertie, quatre accéléromètres et quatre senseurs solaires. Les viseurs d'étoiles qui constituent les capteurs primaires utilisent des caméras dont le champ de vue est de 8 × 8°. Les télécommunications sont assurées via deux antennes paraboliques fixes à grand gain (une en bande X et l'autre en bande Ka) et une antenne moyen gain[6],[7],[5].

Charge utile
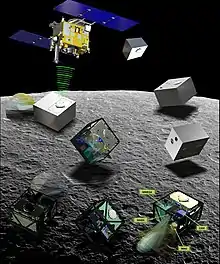
La charge utile de Hayabusa 2 comprend le système de collecte d'échantillon, trois instruments (caméra, caméra infrarouge thermique, spectromètre proche infrarouge), trois petits rovers MINERVA de 1,5 kg analogues à ceux emmenés par Hayabusa et un atterrisseur franco-allemand MASCOT de 10 kg. Ce dernier constitue une nouveauté par rapport à la première mission Hayabusa.
Instrumentation scientifique
La charge utile est composée essentiellement d'instruments déjà embarqués à bord de la première sonde spatiale Hayabusa mais également de nouveaux instruments[6],[5] :
- la sonde spatiale dispose de trois caméras ONC (Optical Navigation Cameras). Les trois caméras disposent chacune d'un détecteur de 1024x1024 pixels collectant la lumière dans une bande spectrale comprise entre 350 et 1060 nanomètres (lumière visible et proche infrarouge). Les deux caméras grand angle ONC-W1 et ONC-W2 ont un champ de vue de 54 × 54° permettant une résolution spatiale de 7 mètres à une distance de 7 kilomètres. La caméra à champ étroit dispose d'un champ optique de 5,8 × 5,7° et sa résolution spatiale est de l'ordre du mètre. ONC-T peut utiliser 7 filtres qui permettent de sélectionner des bandes spectrales étroites (10 à 15 nanomètres) centrées sur les longueurs d'onde 390, 480, 550, 590, 700, 860 et 950 nanomètres. Ces caméras sont utilisées pour la navigation de la sonde spatiale au cours du transit entre la Terre et l'astéroïde, puis une fois cette phase achevée pour la recherche de sites adéquats pour le prélèvement d'échantillons. Les caméras jouent également un rôle crucial dans le guidage de la sonde spatiale pour l'opération de prélèvement d'échantillons en prenant des images entre les altitudes 50 et 5 mètres.
- le spectromètre proche infrarouge NIRS3 (Near IR Spectrometer) observant dans les longueurs d'onde 1,7 - 3,4 micromètres. La lumière pénètre dans l'instrument par une fente de 70 × 70 micromètres. Le détecteur comporte 128 bits ce qui permet une résolution spectrale de 18 nanomètres. Lorsque la sonde spatiale se trouve à une altitude de 20 kilomètres, la résolution spatiale est de 35 mètres. L'instrument d'une masse de 2 kilogrammes est utilisé pour identifier les minéraux hydratés présents à la surface de l'astéroïde, mettre en évidence les terrains les plus jeunes et étudier les éjectas créés par SCI. L'instrument permet de mesurer la proportion de minéraux hydratés avec une précision de 1 % ;
- l'imageur thermique infrarouge TIR (Thermal IR Imager) est une caméra observant dans les longueurs d'onde 7 à 14 micromètres (infrarouge thermique). C'est un instrument mis au point pour la sonde japonaise Akatsuki qui s'est placée en orbite autour de la planète Vénus. Le champ optique est de 12 × 16° et la masse est de 3,3 kg. Le détecteur est un ensemble de bolomètres non refroidis qui restitue une image comportant 320 × 240 pixels. Cet instrument est utilisé pour mesurer les caractéristiques physiques de la surface en mesurant les variations des températures.
- l'altimètre laser LIDAR permettant de mesurer les distances de 50 m à 50 km. Cet instrument d'une masse de 3,7 kilogrammes utilise une source laser infrarouge (1 064 nm) dont la lumière réfléchie par le sol est recueillie par un télescope Cassegrain. Le lidar permet depuis une altitude de 25 km de déterminer la distance avec une précision de ±2 mètres et ±1 m à partir de 50 m d'altitude[8]. L'instrument peut fonctionner dès que la distance est inférieure à 50 kilomètres. L'instrument sera utilisé à des fins de navigation en plaçant la sonde spatiale à une altitude suffisante de la surface et pour déterminer la topographie de l'astéroïde.
Système de collecte d'échantillons
.jpg.webp)
Le système de collecte d'échantillons du sol de l'astéroïde a été fortement revu pour pallier les problèmes rencontrés par l'équipement utilisé par Hayabusa 1 en 2005[5] :
- le petit impacteur SCI (Small Carry-on Impactor) de 18 kg est nouveau. Il comprend une charge d'explosifs qui doit accélérer une masse de 2 kg à 2 km/s. Cette dernière, en frappant le sol de l'astéroïde, doit créer un cratère de 2 mètres de diamètre et soulever des parties du sol qui sont alors recueillies.
- la caméra DCAM3 (Deployable Camera) est dérivée d'un instrument emporté par la sonde spatiale IKAROS. Cet instrument de forme cylindrique d'un diamètre de 6 centimètres pour une longueur de 4 centimètres est largué par la sonde spatiale avant l'impact. Disposant d'une autonomie de plusieurs heures et stabilisée par rotation (60 à 120° par seconde), la caméra doit filmer l'impact. Son champ de vue est de 74 × 74° et elle utilise un détecteur de 1092 × 1092 pixels. À une distance de 1 kilomètre du sol elle fournit des images ayant une résolution spatiale de 65 centimètres. L’événement est photographié au rythme d'une image par seconde. Les images sont transmises à la sonde spatiale par radio avec un débit de 4 mégabits par seconde. Le volume total de donnés devrait représenter environ 1 gigabit.
- le système de collecte en forme de cornet a été amélioré sur plusieurs points : joint d'étanchéité, 3 chambres de stockage au lieu de 2.
Capsule d'échantillons
La capsule qui doit ramener sur Terre les échantillons du sol de Ryugu a la forme d'une soucoupe d'un diamètre de 40 centimètres. Elle est haute de 20 centimètres et sa masse est de 16,5 kilogrammes. Dépourvue de tout système de propulsion ou de contrôle d'orientation, elle comprend en son centre un petit container cylindrique contenant les échantillons. Elles est recouverte par un bouclier thermique ablatif en résine phénolique qui brûle lentement durant la rentrée atmosphérique en protégeant le cœur de la capsule. Outre l'électronique qui commande le déploiement du parachute et de l'antenne d'une balise radio, la capsule emporte un instrument de mesure baptisé REMM (Reentry Flight Measurement Module) qui comprend des capteurs de température, un accéléromètre tri-axial et un capteur de vitesse angulaire. REMM recueille des données durant les sept minutes de la rentrée atmosphérique qui seront utilisées pour améliorer les futures capsules de rentrée atmosphérique[5].
Les rovers MINERVA-II
Hayabusa 2 embarque trois petits rovers MINERVA-II (acronyme MIcro Nano Experimental Robot Vehicle for Asteroid de deuxième génération) - Rover-1A, Rover-1B, Minerva-II2[9] - aux caractéristiques proches de celui déposé par la première sonde spatiale Hayabusa. Il s'agit d'engins de 1,5 kg à 2,5 kg ayant la forme de cylindre à 6 faces haut de 7 centimètres et de 17 cm de diamètre. Leur charge utile est constituée de 3 à 4 caméras, de thermomètres et de photodiodes. L'énergie est fournie par des cellules solaires produisant au maximum 2 watts. Chacun dispose d'un petit ordinateur embarqué utilisant un microprocesseur RISC et transmet les données avec un débit maximal de 32 kilobits par seconde. Les rovers Minerva ont une capacité limitée de déplacement grâce à deux petits moteurs qui créent un moment dont l'axe de rotation peut être orienté. Ce moment dans la faible gravité de l'astéroïde est suffisant pour permettre au rover Minerva de décoller et de se déplacer sur d'assez grandes distances en suivant une trajectoire parabolique[5].
Rover-1A et Rover-1B sont largués sur Ryugu le et prennent les premières photos depuis la surface de l'astéroïde[10].
L'atterrisseur MASCOT


L'atterrisseur MASCOT (Mobile Asteroid Surface SCOuT)[11],[12],[13], développé par l'agence spatiale allemande DLR avec une participation de l'agence spatiale française du CNES, dérive en partie des travaux réalisés sur l'atterrisseur Philae de la sonde européenne Rosetta et des études menées dans le cadre de la proposition de mission MarcoPolo-R. Il doit mener des études scientifiques in situ à la surface de l'astéroïde. Il s'agit d'un engin de 10 kg dont 3 kg de charge utile. Ses dimensions extérieures sont de 0,3 × 0,3 × 0,2 m. La structure est réalisée en fibre de carbone composite. La protection thermique est réalisée de manière passive grâce à un boitier en aluminium contenant les cartes électroniques et un revêtement thermique multicouches MLI. Il est doté d'une source d'énergie non renouvelable (batteries lithium-chlorure de thionyle de 220 Wh produits par Saft) qui lui ont donné une durée de vie de 16 heures contre 12 heures escomptés[14] et lui permet d'effectuer trois déplacements. MASCOT utilise une masse excentrée située au bout d'un bras qui, en pivotant, fournit un moment suffisant pour déplacer l'atterrisseur. Ce système est également utilisé à l'atterrissage pour retourner si nécessaire l'engin afin de permettre à ses instruments de fonctionner de manière nominale. L'atterrisseur dispose d'un ordinateur embarqué qui permet à MASCOT de fonctionner de manière autonome et communique avec son vaisseau mère par le biais de deux antennes omnidirectionnelles situées sur deux faces opposées. Des capteurs, constitués de détecteurs thermiques et de cellules solaires, sont chargés de détecter l’atterrissage, l'orientation et les mouvements à la surface de l'astéroïde[15],[5].
L'atterrisseur comprend 3 kg de charge utile constituée[5] :
- microscope infrarouge hyperspectral MicrOmega fourni par le CNES ;
- caméra multispectrale à champ large CAM développée par l'agence spatiale allemande DLR ;
- magnétomètre 3 axes MAG fourni par l'université technique de Brunswick ;
- radiomètre MARA destiné à mesurer la température de la surface et l'inertie thermique de l'astéroïde et développé par la DLR.
- Schéma des instruments de MASCOT (en vert)
 Radiomètre MARA.
Radiomètre MARA. Magnétomètre MASMAG.
Magnétomètre MASMAG. Caméra MASCAM
Caméra MASCAM
Déroulement de la mission


Lancement et transit jusqu'à l'astéroïde (décembre 2014 - juin 2018)
Hayabusa 2 décolle depuis la base de lancement de Tanegashima le à 4h22 UTC à bord d'un lanceur H-IIA. La fusée emporte également trois autres petits engins spatiaux placés comme Hayabusa 2 sur une orbite héliocentrique : PROCYON, une micro-sonde spatiale expérimentale de 59 kg qui doit effectuer au moins un survol de l'astéroïde 2000 DP107, Shi'nen 2 un nano satellite expérimental de 15 kg et DESPATCH (Deep Space Amateur Troubadour’s Challenge), œuvre artistique de 20 kg[16],[17]. À compter de , la sonde spatiale utilise sa propulsion ionique pour ajuster sa trajectoire avant son survol de la Terre. Trois des quatre moteurs ioniques fonctionnent pendant 409 heures en exerçant une poussée unitaire de 25 millinewtons. Deux autres corrections de trajectoire sont réalisées en (102 heures) et début (12 heures)[18]. Le , la sonde spatiale survole la Terre à une altitude de 3 090 km, ce qui lui permet grâce à l'assistance gravitationnelle de celle-ci, de gagner 1,6 km/s[19],[20].
À la suite du survol de la Terre, Hayabusa 2 effectue plusieurs corrections de sa trajectoire pour rejoindre Ryugu qui circule sur une orbite de 0,96 × 1,42 Unités Astronomiques. Entre mars et sa propulsion ionique fonctionne pendant 794 heures pour modifier sa vitesse de 127 m/s. Un petit ajustement de la vitesse de 40 cm/s est effectué peu après. Pendant cette période, le système de télécommunications est testé pour s'assurer de son bon fonctionnement à grande distance. Entre et , une deuxième correction de trajectoire est effectuée : trois des quatre moteurs ioniques sont utilisés pendant 2 558 heures pour modifier la vitesse de la sonde spatiale de 435 m/s. Le , la sonde spatiale met en marche ses moteurs ioniques qu'elle va désormais solliciter de manière permanente jusqu'à l'approche finale de l'astéroïde prévue en . D'ici là, ses moteurs vont fonctionner pendant 2 700 heures en modifiant sa vitesse de 400 m/s. Le , la caméra de navigation ONC-T est pointée vers l'objectif encore distant de 1,3 million de kilomètres et prend 300 photos dont un échantillon est transmis à la Terre. L'astéroïde Ryugu, visible comme un astre de magnitude optique 9, est identifié sur celles-ci[21].
Étude de l'astéroïde (juin - aout 2019)

La sonde spatiale arrive à 20 km de l'astéroïde Ryugu le . Hayabusa 2 entame la phase scientifique de la mission qui doit durer un an et demi. Durant les deux premiers mois la sonde spatiale va étudier à distance Ryugu pour disposer d'informations plus détaillées sur ses caractéristiques physiques et identifier les sites d'atterrissage potentiels. Au cours de cette phase de reconnaissance la sonde spatiale fait des allers retours en revenant à chaque fois à sa position à 20 kilomètres de l'astéroïde. Elle se déporte latéralement de 10 kilomètres dans toutes les directions puis verticalement en s'approchant à 5 kilomètres à une vitesse de quelques dizaines de centimètres par seconde en réalisant à chaque déplacement des photos. Le niveau de détail à cette distance permet de distinguer les rochers de plus de 1 mètre de diamètre et ainsi de commencer à identifier les sites d'atterrissage potentiels[22],[23]. Le 6 aout il s'approche pour la première fois à 851 mètres de distance[24]. Le 24 aout l'équipe récapitule les informations collectées après les deux mois. Les caractéristiques sont souvent éloignées de ce qui était prévu. Bien que l'astéroïde soit rocheux (densité 3) sa densité n'est que de 1,2 ce qui dénote une forte porosité. La surface est particulière sombre (albédo de 0,02). La forme quasi sphérique étonne car on ne l'attendait pas compte tenu de sa vitesse de rotation particulièrement lente. Enfin la surface est couverte de roches dont la plus grosse de 140 mètres de diamètre est située près du pôle sud. Cette densité de roches bouleverse les plans de la mission car elle rend les tentatives de prélèvement d'échantillon hasardeuses[25].

Sélection des sites d'atterrissage (aout 2018)
La phase d'étude a permis à l'équipe japonaise de recueillir les données permettant de sélectionner les sites d'atterrissage de la sonde spatiale (pour le premier prélèvement d'échantillon du sol de l'astéroïde), des quatre petits rovers MINERVA-II et de l'atterrisseur germano-français MASCOT. Le site de prélèvement de sol doit répondre à un certain nombre de contraintes : il ne doit pas se situer à plus de 200 mètres de l'équateur pour permettre au contrôle au sol de suivre les opérations, l'inclinaison du sol par rapport à la direction du Soleil ne doit pas être de plus de 30° pour que les panneaux solaires soient éclairés suffisamment[Note 1], le nombre de roches de plus de 50 centimètres de haut doit être réduit (longueur du système de prélèvement) et la température doit être inférieure à 97 °C pour être compatible avec la température de fonctionnement des équipements d'Hayabusa 2. Le site L08 sélectionné pour le prélèvement est très proche de l'équateur tout comme les sites de secours L07 et M04. Le site de dépose des quatre rovers MINERVA-II, baptisé N6, est une large ellipse située entre les latitudes nord 30 et 60%[25],[26]. Le CNES et la DLR ont déterminé le lieu d'atterrissage principal de MASCOT parmi 10 sites pré-sélectionnés. « MA-9 » est également situé très près de l'équateur dans l'hémisphère sud de l’astéroïde[27],[28],[29],[30].
Première répétition du prélèvement d'échantillon de sol
Avant d'effectuer le premier prélèvement d'échantillon du sol de l'astéroïde, l'équipe japonaise d'Hayabusa 2 a prévu d'effectuer deux répétitions pour mettre au point l'enchainement des opérations. Ces opérations sont entièrement automatiques car les signaux d'Hayabusa II mettent 17,4 minutes à parvenir jusqu'à la Terre ce qui interdit toute intervention des contrôleurs au sol. La première répétition débute le et doit amener la sonde spatiale à moins de 60 mètres de la surface mais elle est interrompue alors que Hayabusa 2 se situe encore à 600 mètres de distance. L'altimètre laser LIDAR chargé de mesurer la distance ne parvient plus à détecter les réflexions du laser sur la surface très sombre de l'astéroïde[31].
Dépose des mini rovers Minerva-II1 sur le sol de Ryugu (22 septembre)
Le , Hayabusa 2 s'approche à 60 mètres de la surface de l'astéroïde et largue les deux mini-rovers baptisés collectivement Minerva-II1 avant de s'écarter de Ryugu. Tous les deux tombent alors en chute libre à très faible vitesse (la gravité est très faible) et se posent à la surface de Ryugu . Il s'agit des premiers engins mobiles déposés sur un astéroïde. Les rovers et la sonde spatiale transmettent des photos spectaculaires de Ryugu[32],[33],[34].
Dépose de MASCOT (3 octobre)
Le , Hayabusa 2 commence à se rapprocher de la surface de Ryugu pour déposer le petit (30x30x10 cm, masse de 10 kg) atterrisseur franco-allemand MASCOT (Mobile Asteroid Surface Scout). Arrivé à 200 mètres de la surface, les contrôleurs au sol envoient la commande de largage de MASCOT qui se déclenche alors que la sonde spatiale n'est plus qu'à 51 mètres du sol. MASCOT se sépare de Hayabusa 2 sous la poussée d'un ressort puis commence à tomber en chute libre vers la surface de Ryugu (il est dépourvu de propulsion). Durant sa chute, qui est photographiée par Hayabusa 2, l'atterrisseur effectue 20 prises de vue qui sont immédiatement transmises au vaisseau mère. La sonde spatiale a repris de l'altitude et se trouve désormais à 3 kilomètres de distance de l'astéroïde en position pour recevoir les données transmises par l'atterrisseur. MASCOT a une durée de vie limitée à 17 heures car il ne dispose que de batteries. Arrivé au sol 20 minutes après la séparation, MASCOT va enchainer les opérations en partie de manière semi-autonome car la distance de la Terre (35 minutes pour une communication aller-retour) rend difficile les interventions du contrôle au sol. Dans un premier temps MASCOT a des difficultés pour s'orienter car la surface est beaucoup plus sombre que ce qui était prévu. Le contrôle au sol envoie une commande qui permet à l'atterrisseur de se réorienter grâce à la modification de la position d'une masse fixée au bout d'un bras. Dans sa nouvelle position, l'engin parvient à effectuer une séquence d'observations scientifiques complète au cours d'une journée (=7,6 heures terrestres). MASCOT effectue alors un déplacement de quelques mètres qui lui donne un aperçu légèrement différent du terrain environnant et permet au microscope infrarouge hyperspectral MicrOmega de fonctionner. Un troisième déplacement est commandé et les instruments de MASCOT parviennent à recueillir de nouvelles données qui sont transmises avec succès à Hayabusa 2. MASCOT envoie un dernier signal 17 heures après son largage. Ses batteries ont fonctionné environ une heure de plus que prévu[35]. Les photos prises montrent un sol très accidenté et contrairement à ce qui était prévu, une absence totale de régolithe, cette poussière fine produite par les impacts répétés de roches sur la surface des corps célestes. Plusieurs hypothèses sont émises pour expliquer son absence : éjection du fait du rapport en la vitesse d'impact et la faible gravité de Ryugu, éjection ou enfouissement du fait des vibrations[36].
Prélèvement d'un premier échantillon du sol (février 2019)
Au cours de l'automne 2018, l'agence spatiale japonaise (ou JAXA) décide de repousser de plusieurs mois le prélèvement d'échantillons de sol initialement programmé en . En effet la surface de l'astéroïde s'est révélée beaucoup plus tourmentée que prévu. En effectuant une reconnaissance plus détaillée du site d'atterrissage sélectionné, il a fallu réduire le diamètre de la zone visée à 20 mètres, au lieu des 100 mètres prévu, pour avoir l'assurance qu'aucun rocher de plus de 50 centimètres de haut n'était susceptible d'endommager la sonde spatiale[Note 2]. Une répétition doit être effectuée pour s'assurer que le système de navigation est capable de manière autonome de guider la sonde spatiale avec une précision suffisante pour la poser dans le cercle d'un diamètre cinq fois inférieur à ce qui était prévu[37],[38].
Hayabusa 2 effectue une deuxième répétition des opérations de prélèvement d'un échantillon de sol entre le 23 et . La sonde spatiale s'approche à moins de 12 mètres du sol en se dirigeant vers le site d'atterrissage prévu et laisse tomber sur le sol une des cinq sphères réfléchissantes qui servira de repère. En l'illuminant avec un flash la lumière est réfléchie par le marqueur recouvert d'une enveloppe métallique à plusieurs facettes. La lumière réfléchie est analysée par l'ordinateur embarqué de la sonde spatiale qui peut ainsi mesurer sa vitesse horizontale. Cette sphère d'un diamètre de 10 cm a une masse d'environ 300 grammes. Elle est remplie de billes en aluminium dont le rôle est de dissiper l'énergie cinétique au moment de l'impact avec le sol pour éviter un rebond. L'analyse postérieure de la descente montre que la sonde spatiale était située à 15 mètres du centre du site d'atterrissage de 20 mètres de diamètre et qu'il se serait donc posé à l'extérieur de la zone dépourvue d'obstacles dangereux pour l'intégrité de la sonde spatiale[39].
Entre le et le le Soleil s'interpose entre la Terre et Ryugu et les communications avec la sonde spatiale deviennent difficiles. Durant cette période la sonde spatiale réalise de manière automatique deux manœuvres qui la mettent à l'abri d'une collision accidentelle avec l'astéroïde. La sonde s'écarte d'abord de sa position de repos située à 5 kilomètres de l'astéroïde et s'éloigne jusqu'à une distance d'environ 90 kilomètres puis revient progressivement à son point de départ qu'elle atteint à la fin de cette conjonction[39]
Le prélèvement du premier échantillon a lieu avec succès le . La descente vers la surface depuis la position de repos débute vers 4h45 UTC et s'effectue à une vitesse de 90 centimètres par seconde. Un premier arrêt est marqué à 22h02 UTC lorsque Hayabusa 2 n'est plus éloignée que de 200 mètres de la surface. Arrivé à 45 mètres d'altitude, Hayabusa 2 modifie son orientation pour se placer en position d'atterrissage. L'antenne grand gain ne pointe plus vers la Terre et les contrôleurs au sol ne reçoivent plus que les signaux transmis par l'antenne omnidirectionnelle qui leur indiquent simplement la vitesse de la sonde spatiale. Les étapes suivantes sont déclenchées de manière autonome par l'ordinateur embarqué. L'altimètre laser détecte le marqueur qui avait été déposé au sol lors de la répétition effectuée en octobre. Il abaisse alors l'altitude jusqu'à 8,5 mètres. Il corrige la vitesse horizontale en utilisant le marqueur, modifie légèrement son orientation puis descend en chute libre vers le site d'atterrissage. Lorsque le cornet d'échantillonnage touche le sol, une balle de 5 grammes en tantale[Note 3] est tirée à travers le cornet à une vitesse de 300 mètres par seconde[40],[41]. L'impact soulève un nuage de débris dont certains ont une taille de quelques dizaines de centimètres. Une partie des particules de roches pénètre dans le cornet et est stockée dans un des trois compartiments prévus à cet effet. L'équipe japonaise est à peu près certaine que des échantillons ont été prélevés mais elle n'en aura la certitude que lorsque la capsule reviendra sur Terre. L'analyse a posteriori des images de l'atterrissage prises par une des caméras embarquées montre que la sonde spatiale s'est posée à seulement 1 mètre du centre du site sélectionné. Ce dernier est baptisé Tamatebako (en japonais : boite à trésors). Immédiatement après avoir touché le sol, la sonde spatiale s'en écarte[42],[43],[44].
Création d'un cratère artificiel (4 avril 2019)

En la sonde spatiale doit recueillir un deuxième échantillon du sol en utilisant une technique de prélèvement différente de celle mise en œuvre pour le premier échantillon. Hayabusa 2 doit creuser un cratère artificiel et prélever un échantillon du sol dans une couche préservée du sol. Les scientifiques japonais espèrent ainsi acquérir plusieurs informations[45] :
- mesurer la taille d'un cratère sur Ryugu en connaissant la masse et la vitesse d'arrivée de l'impacteur.
- déterminer les caractéristiques du sol lorsqu'il n'a pas été altéré par son exposition au vide interplanétaire (bombardement par le vent solaire et les rayons cosmiques, etc.).
- déterminer dans quelle mesure le sol en surface se déplace facilement lorsqu'il est frappé par un impacteur.
- mesurer le degré de fragmentation des roches lorsqu'elles sont frappées par un impacteur.
La taille du cratère résultant est une inconnue ce qui rend l'expérience particulièrement intéressante. La plupart des modélisations estiment le diamètre à environ 10 mètres mais selon la nature de la surface le diamètre beaucoup plus petit (sol poreux) ou plus important (sol constitué de cailloux de petite taille). Le site retenu pour l'impact se trouve à un quart de circonférence à l'est du premier site de prélèvement et à 300 mètres de l'endroit où MASCOT est situé. Dans la mesure où le deuxième prélèvement pourrait se faire dans le cratère créé, les chercheurs japonais ont sélectionné un endroit aux caractéristiques proches du premier site de prélèvement ce qui permettra d'effectuer des comparaisons. L'impacteur SCI (Small Carry-On Impactor), d'une masse de 2,5 kg, a la forme d'un cône de 30 cm de diamètre et d'une hauteur de 21,7 cm de hauteur. Il est constitué d'un disque de cuivre de deux kilogrammes et d'une charge explosive[45].
La sonde spatiale quitte sa position de repos située à 20 kilomètres de Ryugu le et commence à se rapprocher de l'astéroïde à une vitesse de 40 centimètres par seconde. Arrivé à 5 kilomètres de la surface elle réduit cette vitesse à 10 centimètres par seconde. Elle entre dans un mode autonome avant d'arriver au point de largage. Arrivé à une altitude 500 mètres elle largue le l'impacteur puis s'éloigne dans une direction perpendiculaire à son axe de descente de manière à se mettre à l'abri de retombées éventuelles. Elle largue une caméra DCAM3 (Deployable camera 3) de 2 kilogrammes qui est chargée de filmer l'impact. À environ 300 mètres l'explosion de la charge emportée par l'impacteur est déclenchée. La plaque de cuivre plate et circulaire qui constitue l'impacteur accélère de 2 kilomètres par seconde tout en étant déformée et en prenant la forme d'un casque. Une image prise par la caméra DCAM3 confirme presque immédiatement le succès de l'impact. La sonde spatiale s'éloigne de 100 kilomètres pour éviter de rencontrer des débris qui pourraient flotter dans l'espace et reste à cette distance durant deux semaines. Le la sonde spatiale se rapproche à nouveau de Ryugu pour observer les résultats de l'opération. Sur les photos prises à environ 1,6 kilomètre de distance, un nouveau cratère de 20 mètres de diamètre est clairement visible, une taille bien plus importante que ce qui était prévu[46],[47] ,[45].

Prélèvement d'un deuxième échantillon du sol (11 juillet 2019)
L'équipe projet d'Hayabusa 2 s'interroge sur la nécessité de prélever un deuxième échantillon du sol de Ryugu. Chaque prélèvement présente un risque important du fait de la nature particulièrement chaotique de la surface de l'astéroïde et le premier prélèvement semble avoir été un succès. Néanmoins, en prévision d'une telle opération, l'agence spatiale décide de larguer un marqueur le à quelques mètres du cratère artificiel créé un mois auparavant. Une fois de plus la descente vers le sol est interrompue à une altitude de 50 mètres parce que le lidar utilisé pour mesurer l'altitude ne parvient plus à déceler la surface. Le largage du marqueur est reporté. Mais désormais le temps presse car l'astéroïde approche de son périgée et début juillet la température de surface va dépasser 100 °C et la chaleur rayonnée va devenir trop importante pour permettre à la sonde spatiale de s'approcher[48]. Une deuxième tentative de dépose du marqueur est effectuée le et celle-ci est cette fois une réussite[49].
Les responsables du projet ont finalement décidé de prendre le risque d'effectuer un deuxième prélèvement. Les opérations débutent le lorsque Hayabusa 2 commence à descendre vers la surface de l'astéroïde à une vitesse de 40 centimètres par seconde. La sonde spatiale passe en mode autonomie alors qu'elle se situe encore à 30 mètres du sol. 13 minutes plus tard, le à 1h20 UTC, le cornet de prélèvement touche le sol et une deuxième cartouche de tantale est tirée. Hayabusa 2 s'éloigne immédiatement et 20 minutes plus tard la liaison est rétablie avec la Terre. Les images prises par la caméra embarquée CAM-H montrent que l'opération a été un succès. Hayabusa 2 a touché le sol à seulement 60 centimètres du centre du site visé[50],[51].
Le la sonde spatiale se rapproche à un kilomètre de l'astéroïde, largue les deux marqueurs puis s'en éloigne à une vitesse de 11 centimètres par seconde tout en filmant la chute des objets vers le sol de Ryugu. L'opération est une répétition du largage du rover MINVERVA-II-2. Ce dernier construit par une équipe différente des MINERVA-II-1 présente une anomalie de fonctionnement qui laisse planer un doute sur son système de télécommunications. MINVERVA-II-2 est largué le depuis une altitude d'un kilomètre et sa trajectoire est mesurée visuellement mais également à l'aide d'un accéléromètre embarqué car son objectif est de préciser les conditions de navigation dans un champ de gravité très faible comme celui de Ryugu. Il est prévu qu'il se pose à la surface de l'astéroïde le [52],[53].
Retour sur Terre (13 novembre 2019 - 5 décembre 2020)
Hayabusa 2 achève ses observations de l'astéroïde au cours de l'automne 2019. La sonde spatiale reprend la direction de la Terre le . A 36 millions de kilomètres de la Terre la sonde spatiale effectue avec ses moteurs ioniques la première des cinq corrections de la trajectoire qui doivent lui permettre de larguer la capsule d'échantillons sur la trajectoire souhaitée. Celle-ci se détache de la sonde spatiale le à 5h35 UTC (14h24 heure de Tokyo) alors que Hayabusa 2 se trouve encore à 220 000 kilomètres de la Terre. La capsule s'éloigne de la sonde spatiale sous l'action d'un ressort qui lui imprime un mouvement de rotation permettant de stabiliser son orientation. Une heure plus tard la sonde spatiale effectue une première correction de trajectoire qui doit lui éviter de s'écraser à la surface de la Terre et survole celle-ci à environ 200 kilomètres de distance avant d'entamer une nouvelle mission. La capsule d'échantillons, qui ne dispose pas de système de propulsion, pénètre dans l'atmosphère terrestre à 17h28 UTC alors qu'elle n'est plus qu'à 121 kilomètres de la surface. Sa vitesse est de 11,7 km/s et du fait des forces de friction la température de son bouclier thermique s'élève jusqu'à 3 000°C. Les couches d'isolant thermique qui entourent l'échantillon maintiennent sa température en dessous de 80°C. Deux avions Gulfstream affrétés par la NASA survolent la région pour photographier la rentrée atmosphérique de la capsule et en déduire des informations permettant d'améliorer la conception du bouclier thermique. A 17h32 UTC, alors que la capsule ne se trouve plus qu'à 10 kilomètres d'altitude, les boucliers thermiques avant et arrière sont largués. le parachute de la capsule s'ouvre, l'antenne de sa balise radio est déployée et celle-ci commence à émettre. La capsule se pose en douceur quelques minutes plus tard dans le désert de Woomera en Australie[54],[55],[56].
Compte tenu de la précision des manœuvres effectuées avant le largage de la capsule par la sonde spatiale, celle-ci doit se poser dans un quadrilatère de 100 kilomètres de côté. Plusieurs méthodes sont utilisés pour retrouver la capsule dont la taille (40 centimètres de diamètre) peut soulever quelques problèmes de repérage sur une surface aussi importante. Un radar est utilisé pour suivre la course du parachute qui comporte une couche réfléchissant les ondes émises par celui-ci. Cinq stations de réception radio disposant d'une antenne directionnelle effectuent un relevé de la balise de la capsule pour déterminer par triangulation la trajectoire de celle-ci. Un dispositif de secours a été mis en place au cas où les méthodes de repérage précédentes seraient infructueuses : des photographies de la capsule sont également effectuées depuis le sol et les airs par un drone. Par recoupement entre ces photos, la zone d'atterrissage peut être précisée. Finalement la capsule est très rapidement retrouvée et l'équipe vérifie qu'il ne reste pas des composants pyrotechniques non amorcés puis la capsule est transférée par hélicoptère dans une salle blanche provisoire pour un premier examen rapide. Une fois celui-ci achevé, la capsule doit être transférée par avion jusqu'à Tokyo pour l'étude des échantillons en laboratoire dans un environnement d'azote[57],[55].
- Retour sur Terre de la capsule
.jpg.webp) Largage de la capsule contenant les échantillons de sol lors du survol de la Terre (vue d'artiste).
Largage de la capsule contenant les échantillons de sol lors du survol de la Terre (vue d'artiste). La capsule contenant l'échantillon est pratiquement similaire à celle de Hayabusa dont une réplique est présentée ici.
La capsule contenant l'échantillon est pratiquement similaire à celle de Hayabusa dont une réplique est présentée ici.
Analyse des échantillons de sol
Les analyses de l'échantillon, dont la masse est de finalement de 5,4g au lieu des 100 milligrammes escomptés, doivent être effectuées au Centre de conservation des échantillons extraterrestres de l'agence spatiale japonaise (ou JAXA) construit spécifiquement pour cette mission. Cette analyse sera effectué par une équipe internationale comprenant notamment des chercheurs français. Le microscope hyperspectral MicrOmega, développé par l’Institut d’astrophysique spatiale sera utilisé pour effectuer une première analyse non destructrice[58] sous la responsabilité de l’astrophysicien Jean-Pierre Bibring. Cela est officialisé par un accord signé le [59]. La NASA recevra une partie de l'échantillon récolté en échange de portions de l'échantillon de l'astéroïde Bénou collectés par la sonde spatiale américaine OSIRIS-REx dont le retour sur Terre aura lieu en 2023[60].
Suite de la mission : Hayabusa 2 extended

Au cours des 6 années écoulées depuis son lancement, la sonde spatiale a fait fonctionner pendant 1 an et demi ses moteurs ioniques qui lui ont permis de modifier sa vitesse de 2 km/s. A l'issue de celle-ci la sonde spatiale dispose encore de la moitié de sa réserve de xénon (l'ergol utilisé par ses moteurs ioniques) et elle est en parfait état de marche. L'agence spatiale japonaise (ou JAXA) a décidé de prolonger la mission de Hayabusa 2 en lui donnant un deuxième objectif : l'étude de l'astéroïde 1998 KY26 qui appartient à une catégorie jamais encore visitée par une sonde spatiale. Il s'agit d'un astéroïde de petite taille (30 mètres) en rotation rapide (une rotation toutes les 10 minutes). La sonde spatiale doit l'atteindre en juillet 2031 soit après plus de 10 ans de transit. Durant celui-ci la sonde spatiale réalisera six fois le tour du Soleil en modifiant progressivement son orbite à l'aide de sa propulsion ionique. Au cours de cette phase elle effectuera plusieurs opérations scientifiques : observation de la lumière zodiacale pour déterminer la distribution de la poussière interplanétaire dans le système solaire, observations de transit d'exoplanètes devant leur étoile. La sonde spatiale effectuera un survol à grande vitesse de l'astéroïde 2001 CC21 et tentera d'effectuer des photos de celui-ci malgré l'absence de téléobjectifs. La sonde spatiale doit utiliser l'assistance gravitationnelle de la Terre à deux reprises : en décembre 2027 et en juin 2028. La sonde spatiale se placera à proximité de son objectif en juillet 2031. L'observation de l'astéroîde doit permettre de comprendre pourquoi un astéroïde de ce type en rotation rapide ne se désintègre pas. Ce spécimen est représentatif des astéroïdes géocroiseurs qui menacent d'impacter la Terre et son étude doit fournir des éléments permettant de définir un système de défense planétaire. Il est prévu que Hayabusa 2 tente de se poser à la surface de 1998 KY26[61],[62].
Résultats de la mission
Les principaux résultats de la mission Hayabusa 2 seront obtenus en analysant les échantillons de sol de l'astéroïde ramenés sur Terre. Néanmoins les différents instruments (caméras, spectromètres, altimètre) ont permis d'effectuer des observations in situ qui ont fait progresser de manière significative notre connaissance des astéroïdes.
Description physique
Les premières observations optiques de Ryugu par la sonde spatiale Hayabusa 2 débutent en juin 2018 mais les premiers résultats scientifiques sont communiqués en . Ryugu a la forme d'une toupie avec un épais bourrelet au niveau de l'équateur. Le diamètre en passant par l'équateur est de 1004 mètres alors que la circonférence en passant par les pôles est de 875 mètres (dans les deux cas à 4 mètres près. L'astéroïde est en rotation rétrograde avec une période de 7,63 heures. L'axe de rotation est pratiquement perpendiculaire au plan orbital avec une inclinaison orbitale de 171,6°. Son volume est de 0,377 km3 et sa densité est de 1,19. En partant de l'hypothèse qu'il est composé de chondrites carbonées (densité minimale de 2,42), il en découle que sa porosité est de 50%. C'est un des objets les plus sombres jamais observés dans le système solaire (albédo compris entre 1,4 et 1,8 %). La surface est recouverte de rochers (2 fois plus que Itokawa) dans des proportions qui ont étonné l'équipe scientifique. Le plus important, baptisé Otohime, fait 160 mètres dans sa plus grande longueur. Aucun satellite n'a pu être observé. La forme très symétrique de Ryugu (vu du pôle il est presque parfaitement circulaire), pourrait être expliquée si l'astéroïde tournait plus rapidement qu'il ne le fait. Les cratères observables sur le bourrelet équatorial impliquent que cette formation est ancienne mais elle l'est moins que les zones situées aux latitudes intermédiaires. On dénombre à la surface de Ryugu une trentaine de dépressions circulaires de plus de 20 mètres de diamètre mais près de la moitié ne sont pas entourées d'un rebord et pourraient résulter de l'effondrement de la surface ou l'éjection de celle-ci par les forces centrifuges[63].
La question de l'origine
Comme tous les astéroïdes de cette taille circulant sur une orbite de quasi collision avec la Terre, Ryugu n'est pas très âgé à l'échelle géologique. Ce type d’astéroïde est le fragment d'un astéroïde plus gros circulant dans la ceinture d'astéroïdes qui a éclaté à la suite d'une collision. L'orbite de Ryugu soumis à la fois à l'effet Yarkovsky et à l'effet YORP s'est progressivement rapprochée de celle des planètes internes. En étudiant les spectres des roches de Ryugu, les scientifiques japonais ont tenté de déterminer l'astéroïde parent. Les candidats les plus proches sont (142) Polana et (495) Eulalie mais les spectres sont légèrement différents. L'albédo particulièrement bas a surpris les scientifiques qui s'attendaient à une valeur comprise entre 3 et 4%. Aucune météorite identifié sur Terre n'a un albédo aussi bas. La composition des roches à la surface de Ryugu semble très homogène. Tous les spectres montrent une petite quantité d'hydroxyde probablement présent dans un minéral argileux riche en magnésium. Cette composition indique que les matériaux présents ont interagi par le passé avec de l'eau. Cette composition et l'apparence (albédo) semblent indiquer que les roches qui forment Ryugu sont issues des couches internes d'un astéroïde de grande taille qui aurait subi un métamorphose thermique tout en étant infiltré par de l'eau. Pour que ce processus se déclenche il fallait que cet astéroïde fasse quelques centaines de kilomètres de diamètre. Le réchauffement très important généré a pu l'être soit par la décomposition radioactive de l'aluminium 26 soit par un impact violent avec un autre astéroïde[63].
Les photos prises par le petit rover Mascot ont permis de constater que la surface de l'astéroïde était recouverte par deux types de roches présentes dans des proportions pratiquement égales. Le premier type est caractérisé par un albédo relativement élevé avec des faces aux formes douces et des arêtes aiguisées. La deuxième catégorie de roche est plus sombre avec une surface friable en forme de chou-fleur. On y observe des inclusions de petits grains riches en calcium et en aluminium. Ces roches ressemblent à un type de météorite rare : la chondrite carbonée. Ces roches ont été créées il y a 4,5 milliards d'années soit pratiquement au moment de la formation du système solaire. Elles n'ont jamais fondu et n'ont jamais subi d'impacts d'autres objets mais elles ont pu être chimiquement modifiées par la présence d'eau à l'état liquide. Deux scénarios peuvent expliquer la présence de ces deux types de roches. Selon le premier scénario l'astéroïde a été formé à la suite de la collision de deux corps composés de matériaux d'origine différente. Les débris résultants sous l'influence de leur gravité ont formé un nouvel astéroïde à la structure hétérogène. Selon le deuxième scénario, l'astéroïde serait issu d'un corps céleste dont la structure interne aurait subi des conditions de pression et de température non homogènes[64].
Absence de régolithe
Les photos prises par le petit rover Mascot ont également permis de constater qu'il n'y avait ni régolithe ni poussière à la surface de l'astéroïde. Or le bombardement continuel de l'astéroïde par les micrométéorites devrait produire du régolithe. Cette absence serait due à la gravité très faible qui empêche les débris produits par les impacts de se déposer à la surface. Le régolithe pourrait également s'infiltrer entre les roches très poreuses qui forment l'astéroïde[64].
Les chondrites : un matériau très friable
Les astéroïdes de type C comme Ryugu représentent 75% de l'ensemble des astéroïdes. La proportion de météorites de ce type sur Terre, très faible, ne reflète pas cette abondance. L'étude par Hayabusa 2 des propriétés thermiques des chondrites qui forment le matériau de base de ces astéroïdes, fournit une explication à ce phénomène. Le petit rover franco-allemand MASCOT a utilisé le radiomètre MARA pour mesurer l'évolution de la température de roches de ce type en fonction de l'éclairement. Les scientifiques ont pu en déduire que les chondrites étaient extrêmement friables. Durant la rentrée atmosphérique d'un astéroïde de ce type, il est probable que seuls les corps les plus massifs atteignent la surface de la Terre, les autres brûlant entièrement dans l'atmosphère[65].
Notes et références
Notes
- La sonde spatiale se présente en étant pratiquement sur la ligne reliant l'astéroïde d'une part et la Terre et le Soleil d'autre part. La valeur de l'inclinaison dépend donc de la pente locale et de la latitude (plus celle-ci est élevée plus l'inclinaison est importante)
- Le cornet d'échantillonage dépasse de un mètre le corps de la sonde spatiale mais celle-ci n'est pas parallèle au sol et ses panneaux solaires d'une envergure de 5 mètres pourraient toucher un rocher d'une hauteur supérieure à 50 centimètres
- Ce métal a été choisi parce que, lorsque le prélèvement sera analysé sur Terre, les scientifiques pourront isoler sans ambiguité les éclats de la balle du reste de l'échantillon.
Références
- Rémy Decourt, « En bref : le Cnes et le DLR fourniront l'atterrisseur d'Hayabusa-2 », futurasciences, .
- (en) « Asteroid explorer Hayabusa 2" », JAXA (consulté le ).
- (en) Paul Abell et all, « "Hayabusa 2" », , p. 13-14.
- (en) Paul Abell et all, « "Hayabusa 2" », , p. 5.
- (en) Patric Blau, « Hayabusa-2 – Asteroid Exploration Mission », sur spaceflight101.com (consulté le ).
- (en) « Asteroid explorer "Hayabusa 2" », JAXA (consulté le ).
- « La sonde Hayabusa 2 », CNES (consulté le ).
- (en) 46th Lunar and Planetary Science Conference (2015) : PERFORAMANCE OF HAYABUSA-2 LIDAR IN ACCEPTANCE AND VERIFICATION TESTS.
- (en) « The small exploration rovers, MINERVA-II1 », sur hayabusa2.jaxa.jp.
- (en)Les premières images de la surface de Ryugu depuis la sonde Minerva 2-I, JAXA, 27 septembre 2018.
- (en)Page consacrée à MASCOT sur le site du projet Hayabusa2 de la JAXA.
- Page consacrée à MASCOT sur le site du CNES, 30 mais 2018.
- (en)Liens vers les partenaires de MASCOT sur le site du projet Hayabusa2 de la JAXA.
- Yann Cochennec, « Les batteries Saft étaient aussi sur le robot Mascot », sur Air et Cosmos, (consulté le ).
- « Hayabusa-II > 'atterrisseur MASCOT », CNES (consulté le ).
- (en) William Graham, « Japanese H-IIA kicks off Hayabusa 2’s asteroid mission », sur NASASPaceflight.com, .
- (en) Paul Abell et all, « "Hayabusa 2" », , p. 10.
- (en) Patric Blau, « Hayabusa 2 Asteroid Explorer inbound for High-Speed Earth Swing-by », sur spaceflight101.com, .
- Eric. Bottlaender, « Hayabusa accélère vers Ryugu », Air & Comos, no 2480, , p. 38.
- (en) Patric Blau, « Hayabusa 2 delivers Photos of speedy Earth Swing-By », sur spaceflight101.com, .
- (en) Patric Blau, « Eyes on Target: Japan’s Hayabusa 2 Takes First Images of Asteroid Ryugu », sur spaceflight101.com, .
- (en) Emily Lakdawalla, « Hayabusa2 descends from Home Position to take its first close look at Ryugu », The Planetary Society, .
- (en) Emily Lakdawalla, « A second successful medium-altitude operation for Hayabusa2 », The Planetary Society,
- (en) Emily Lakdawalla, « Hayabusa2 descends again, this time to lower than 1000 meters above Ryugu », The Planetary Society,
- (en) Emily Lakdawalla, « Hayabusa2 Team Announces Ryugu Landing Sites, Initial Science Survey Results », The Planetary Society,
- (en) « Candidates for landing sites for the Hayabusa2 mission », Agence spatiale japonaise,
- MA-9 : Le site d'atterrissage de Mascot sur l'astéroïde Ryugu, Site du CNES, le 23 août 2018.
- Choix du site d'atterrissage de Mascot, un vrai challenge, CNES, 14 août 2018 .
- Trois sites d'atterrissage sélectionnés pour la mission d'exploration de l'astéroïde Ryugu par Hayabusa2, Site du CNES, 23 août 2018.
- Astéroïde Ryugu : voici l'endroit où va se poser le robot Mascot, Futura Sciences, 23 août 2018 .
- (en) Emily Lakdawalla, « Hayabusa2 stops short of close approach on first touchdown rehearsal », The Planetary Society,
- (en) Jason Davis, « Japan's asteroid hoppers deliver new batch of incredible images », The Planetary Society,
- (en) Jason Davis, « Japan's Hayabusa2 spacecraft successfully drops rovers on asteroid Ryugu », The Planetary Society,
- (en) « MINERVA-II1 of Hayabusa2 Touches Down Ryugu », sur global.jaxa.jp, .
- (en) Emily Lakdawalla, « MASCOT landing on Ryugu a success », The Planetary Society,
- « Les premières photos de Ryugu par MASCOT », sur CNES - MASCOT, CNES, .
- (en) « Schedule change for the touchdownoperation », sur Hayabusa 2, JAXA, .
- (en) Jason Davis, « Collecting a sample from asteroid Ryugu is going to be dicey », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 prepares for holiday break as Sun passes between Earth and asteroid Ryugu », The Planetary Society,
- (en) Jason Davis, « What to expect when Hayabusa2 collects a sample from Ryugu », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 has touched down on Ryugu », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 Scores a Bulls-eye on Touchdown, More Explodey Fun on the Horizon », The Planetary Society,
- (en) Sawau Shujori, « Hayabusa's Return Jourey to Earth - With the hopes of 880 000 people », sur JAXA (consulté le ).
- « Mission MASCOT/Hayabusa 2 », CNES.
- (en) Jason Davis, « What to Expect When Hayabusa2 Blows a Hole in Asteroid Ryugu », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 Safe and Sound after Blasting New Crater on Ryugu », The Planetary Society,
- (en) Jason Davis, « Here’s an Update on Hayabusa2’s Crater-Creating Explosion », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 Encounters Snag Trying to Drop Second Target Marker », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 drops second target marker, targets artificial crater for sample collection », The Planetary Society,
- (en) Andrew Jones, « Hayabusa2 makes second touchdown on asteroid Ryugu », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 Nailed its Second Touchdown on Asteroid Ryugu », The Planetary Society,
- (en) Stephen Clark, « Hayabusa 2 completes practice run for deployment of last asteroid lander », sur spaceflightnow.com,
- (en) Evan Gough, « Hayabusa 2 Has Sent its Last Rover to Ryugu », sur universetoday.com,
- (en) JAXA, « Overview: Capsule Recovery », sur Hayabusa 2 (consulté le )
- (en) Philip Whitehouse, « JAXA’s Hayabusa2 asteroid sample return capsule lands in Australia », sur nasaspaceflight.com,
- (en) Stephen Clark, « Japanese capsule carrying asteroid rocks lands in Australia after six-year mission », sur spaceflightnow.com,
- (en) JAXA, « Capsule collection : Search for the re-entry capsule », sur Hayabusa 2 (consulté le )
- « Coopération spatiale entre la France et le Japon - Première collecte d’échantillons sur Ryugu par Hayabusa 2 » [PDF], sur CNRS, .
- « Poursuite des accords franco-japonais sur l’exploration du système solaire », sur Air et Cosmos, (consulté le ).
- (en) « NASA to Receive Hayabusa2 Asteroid Sample from Japanese Colleagues », sur NASA, .
- (en) John Boyd, « Japan Prepares to Welcome Home Asteroid Explorer Hayabusa2 », IEEE Spectrum, .
- (en) JAXA, « A new Challenge - Extended mission », sur Hayabusa 2, .
- (en) Emily Lakdawalla, « First Science Results from Hayabusa2 Mission », The Planetary Society,
- (en) Jason Davis, « Hayabusa2 Lander Mania: Results from MASCOT, Plans for MINERVA-II2 », The Planetary Society,
- (en) « Small fragments of carbon-rich asteroids are too fragile to survive entry into Earth’s atmosphere : MASCOT confirms what scientists have long suspected », DLR,
Voir aussi
Bibliographie
- (en) Hayabusa2 Project Team, Hayabusa2 Information Fact Sheet, JAXA, , 136 p. (lire en ligne)Description de la mission publiée par l'agence spatiale japonaise à l'arrivée de Hayabusa 2 à proximité de Ryugu
- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2)
- (en) Shogo Tachibana, M. Abe, Masahiko Arakawa, M. Abe et al., « Hayabusa2: Scientific importance of samples returned from C-type near-Earth asteroid (162173) 1999 JU3 », Geochemical journal, vol. 48, no 6, , p. 571-581 (DOI 10.2343/geochemj.2.0350, lire en ligne)
- (en) Koji Wada, Matthias Grott, Patrick Michel, Kevin Walsh, Antonella Barucci et al., « Asteroid Ryugu Before the Hayabusa2 Encounter », Progress in Earth and Planetary Science, , p. 62 (DOI 10.1186/s40645-018-0237-y, lire en ligne)
- (en) Yuichi Tsuda, Takanao Saiki, Naoko Ogawa, Mutsuko Morimoto et al., « TRAJECTORY DESIGN FOR JAPANESE NEW ASTEROID SAMPLE RETURN MISSION HAYABUSA-2 », JAXA, , p. 7 (lire en ligne)
- (en) J de León, H Campins, D Morate, M de Prá, V Alí-Lagoa et al., « Expected spectral characteristics of (101955) Bennu and (162173) Ryugu, targets of the OSIRIS-REx and Hayabusa2 missions », Icarus, , p. 25–37 (DOI 10.1016/j.icarus.2018.05.009, lire en ligne)
- (en) JP. Bibring, V. Hamm, Y. Langevin et al., « The MicrOmega Investigation Onboard Hayabusa2 », Space Science Reviews, vol. 208, , p. 401–412 (DOI 10.1007/s11214-017-0335-y, lire en ligne)
Articles connexes
Liens externes
- (en) Description détaillées des caractéristiques techniques de Hayabusa 2 et du déroulement de la mission sur le site /spaceflight101.com
- (en) Page dédiée sur le site EO Portal de l'Agence spatiale européenne
- (en) (ja) Page dédiée au projet Hayabusa2 sur le site de la JAXA
- (en) (ja) Dépêches sur le site de la mission
- (en) Site du suivi de mission en directe de la sonde (septembre 2018
- (en) Présentation de la sélection des sites d'atterrissage par l'Agence spatiale japonaise (23 aout 2018)
- (fr) Hayabusa 2 sur le site du CNES missions scientifiques
- (en) Présentation de la mission (juillet 2014)
- (en) Présentation de la mission (juin 2013)
- (ja) HAYABUSA II -Rebirth of Phoenix- / Xenon-P feat. Hatsune Miku, une musique de Hatsune Miku sur le lancement de la sonde Hayabusa 2, par Xenon Maiden et SHO
- "Hayabusa, un petit tour et puis s'en va", La Méthode Scientifique, France Culture, 12 mars 2019
 Portail de l’astronautique
Portail de l’astronautique  Portail de l’astronomie
Portail de l’astronomie  Portail des planètes mineures et comètes
Portail des planètes mineures et comètes  Portail du Japon
Portail du Japon