Moment d'inertie
Le moment d'inertie est une grandeur physique qui caractérise la géométrie des masses d'un solide, c'est-à-dire la répartition de la matière en son sein. Il quantifie également la résistance à une mise en rotation de ce solide (ou plus généralement à une accélération angulaire), et a pour dimension M·L 2 (le produit d'une masse et du carré d'une longueur, qui s'exprime en kg m2 dans le S.I.). C'est l'analogue pour un solide de la masse inertielle qui, elle, mesure la résistance d'un corps soumis à une accélération linéaire.
Pour les articles homonymes, voir Moment.
.jpg.webp)
| Unités SI | kg m2 |
|---|---|
| Dimension | M·L 2 |
| Nature | Grandeur tensorielle extensive |
| Symbole usuel | I, JΔ |
| Lien à d'autres grandeurs |

Dans le cas simple de la rotation d'une masse autour d'un axe fixe, le moment d'inertie par rapport à cet axe est une grandeur scalaire qui apparaît dans les expressions du moment cinétique et de l'énergie cinétique de rotation de ce corps. Toutefois dans le cas général d'une rotation autour d'un axe dont la direction varie au cours du temps, il est nécessaire d'introduire un tenseur symétrique du second ordre, le tenseur d'inertie. Il est toujours possible de choisir un système d'axes, dits axes principaux d'inertie, tels que la matrice représentative de ce tenseur prenne une forme diagonale. Les trois moments correspondants sont moments principaux d'inertie. Dans le cas particulier d'un solide homogène, ils ne dépendent que de la forme géométrique de celui-ci.
En mécanique des matériaux l'appellation de « moment d'inertie » est parfois utilisée pour déterminer la contrainte dans une poutre soumise à flexion. Il s'agit alors d'une notion physique différente, encore appelée moment quadratique, qui a pour grandeur physique L4 (la quatrième puissance d'une longueur, exprimée en m4 dans le S.I.).
Approche empirique
Résistance au mouvement
Le moment d'inertie est au mouvement de rotation l'analogue de la masse pour le mouvement de translation : il reflète la « résistance » qu'oppose un corps à sa mise en mouvement.
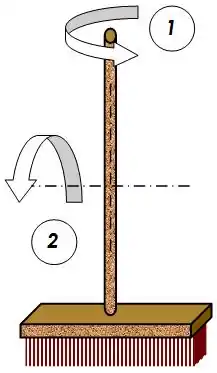
Cette difficulté est d'autant plus grande, dans le cas de la rotation d'un solide, que les masses en son sein se trouvent loin de l'axe de rotation. Ainsi par exemple dans le cas d'un balai pris en main au milieu du manche (cf. figure ci-contre), il est plus aisé de le faire tourner autour de l'axe du manche (cas 1), qu'autour de l'axe transversal indiqué (cas 2). En effet, dans ce dernier cas la brosse, dont la masse relative par rapport au manche est importante, est située plus loin de l'axe de rotation que dans le premier cas (il y a également dissymétrie dans la répartition des masses autour de l'axe de rotation). Comme pour un solide en rotation, la vitesse linéaire d'un point croît en proportion avec cet éloignement, il est nécessaire, à vitesse angulaire égale, de communiquer une plus grande énergie cinétique aux points éloignés. D'où la plus grande résistance du balai à tourner autour d'un axe transversal qu'autour de l'axe du manche.
Énergie nécessaire au mouvement
Dans cette analogie, l'énergie nécessaire à la mise en mouvement se transforme (d'une manière ou d'une autre) en énergie cinétique. Dans le cas d'un mouvement de translation, l'énergie cinétique d'un point de masse m est donnée par la formule . Dans le cas d'une rotation d'un solide autour d'un axe fixe, il est possible de montrer que l'énergie cinétique totale se met sous la forme , où le terme est précisément le moment d'inertie par rapport à l'axe de rotation, c'est-à-dire une forme analogue à celle de l'énergie cinétique du mouvement de translation. Le moment d'inertie apparaît ainsi comme l'analogue de la masse (inerte) du solide dans le cas du mouvement de translation, et est donc en relation avec la "résistance" de celui-ci à sa mise "en rotation". En fait l'explication du phénomène empirique de plus grande "résistance à tourner" du balai selon que le choix de l'axe de rotation axial ou transversal est liée au fait que le moment d'inertie par rapport à l'axe dans ce dernier cas est plus grand que dans le premier.



Mise en évidence et définition du moment d'inertie
Soit un solide, considéré comme composé de plusieurs points matériels de masse , dont les distances mutuelles sont fixes. Ce système est en mouvement de rotation autour d'un axe , fixe dans le référentiel d'étude, à la vitesse angulaire , qui est la même (à un instant donné) pour tous les points du système. Le moment d'inertie autour de l'axe apparaît alors naturellement dans les expressions de l'énergie cinétique et du moment cinétique du solide considéré.




Énergie cinétique de rotation
L'énergie cinétique étant une grandeur extensive, c'est-à-dire que sa valeur sur un système complexe est la somme des valeurs sur les parties élémentaires, l'énergie cinétique totale du solide considéré s'exprime donc sous la forme :
- ,

avec :
- , distance du point à l'axe de rotation ( désignant la projection de sur ) ;
- .




Cette expression possède une analogie évidente avec celle de l'énergie cinétique pour un point matériel (ou un solide en translation), où celle-ci s'écrit . Dans le cas de la rotation la vitesse angulaire ω est l'homologue de la vitesse linéaire v, et le moment d'inertie comme l'homologue de la masse m. Toutefois le moment d'inertie dépend également de la répartition des masses autour de l'axe et sa valeur dépend donc du choix de celui-ci.

En tant qu'homologue de la masse (inerte) pour la rotation, ce terme reflète la "résistance" du solide à sa mise en rotation, comme il avait été indiqué dans l'approche empirique précédente.
Moment cinétique de rotation du solide
De la même façon que pour l'énergie cinétique, et du fait du caractère extensif de cette grandeur, le moment cinétique du solide par rapport à un point quelconque de l'axe s'exprime alors sous la forme, en utilisant les mêmes notations que précédemment :


Comme la vitesse d'un point est donnée par , la composante du moment cinétique colinéaire à l'axe de rotation correspond au second terme de la somme[1], et se met sous la forme :

- , puisque par hypothèse.


Dans les deux cas apparaît la grandeur caractéristique, qui ne dépend que de la géométrie des masses du solide, appelé moment d'inertie par rapport à l'axe :
- .
Remarque : il convient de souligner que , moment cinétique du solide au point de l'axe de rotation n'est pas en général colinéaire à cet axe. Ce n'est que si l'axe de rotation coïncide avec un axe principal d'inertie du solide, ce qui est notamment le cas s'il est un axe de symétrie matérielle du solide, c'est-à-dire à la fois axe de symétrie géométrique et que pour tout couple de points symétriques l'un par rapport à l'autre on ait , que sera colinéaire à l'axe de rotation. En fait on aura alors par rapport à tout point situé sur l'axe de rotation.




Unités du moment d'inertie
Du fait de sa définition , le moment d'inertie a les dimensions d'une masse par le carré d'une longueur soit M·L 2. Son unité dans le système international d'unités pourra donc naturellement être exprimée en kg⋅m2, unité qui n'a pas de nom propre.
On peut cependant remarquer que dans la relation , la vitesse de rotation ω n'est pas exprimée en s−1, mais en rad⋅s−1. Toutefois, étant défini comme le rapport de deux longueurs, le radian, considéré comme unité dérivée du système international depuis la 20e conférence générale du BIPM[2], est sans dimension, par suite ceci n'affecte pas l'homogénéité de l'équation aux dimensions de l'expression de l'énergie cinétique. Il ne serait cependant pas faux que le moment d'inertie soit exprimé en kg⋅m2⋅rad−2, mais ce choix est rarement retenu en pratique. Son seul intérêt serait de rappeler qu'il s'agit d'une unité spécifiquement rattachée au mouvement de rotation, comme pour toutes les unités où le radian apparaît.

Généralisation à un solide quelconque
Par extension dans un solide considéré comme un ensemble continu de points matériels affectés d'une masse volumique , le moment d'inertie s'écrit :



où
- est la distance entre le point et l'axe Δ ;
- est un volume élémentaire autour de ;
- est la masse de ce volume élémentaire ;
- est la masse volumique autour de .



Cette définition peut également prendre une forme vectorielle :

où
- est un point sur l'axe ;
- est un point du solide considéré ;
- est un vecteur unitaire de l'axe ;
- désigne le produit vectoriel et la norme euclidienne.




Généralisation à un système quelconque
En toute rigueur, la notion de moment d'inertie n'est définie que si la quantité peut être isolée des expressions de l'énergie cinétique ou du moment cinétique de rotation, c'est-à-dire que dans la mesure où la vitesse angulaire est la même pour les points du système à un instant donné. Ceci n'est valable strictement que dans le cas du modèle du solide indéformable.

Toutefois, la définition précédente peut s'étendre à un système déformable, dès lors qu'il ne présente pas de rotation différentielle, ou que l'on peut négliger l'effet de celle-ci, de façon qu'il soit possible de considérer que tous les points du système ont à un instant donné la même vitesse angulaire. Par exemple un système articulé, constitué de plusieurs solides reliés entre eux par des liaisons, en rotation autour d'un axe fixe, si les vitesses angulaires de rotation entre les diverses parties sont petites devant la vitesse angulaire de rotation « globale ». Toutefois, pour un système déformable le moment d'inertie n'est plus constant dans le temps.
Moment d'inertie et moment cinétique
Dans la comparaison entre le mouvement de rotation et le mouvement de translation, le moment cinétique est l'homologue de la quantité de mouvement, et pour un système isolé est une grandeur conservative.
Comme indiqué précédemment, il découle de la définition du moment d'inertie que plus les masses constituant un solide sont réparties loin de l'axe de rotation, plus son moment d'inertie par rapport à cet axe est important. Comme la composante axiale du moment cinétique est égale au moment d'inertie multiplié par sa vitesse angulaire de rotation, et du fait de son caractère conservatif, si le moment d'inertie d'un système diminue du fait d'une variation de sa géométrie interne, sa vitesse angulaire de rotation doit augmenter (et inversement).
Ainsi, le patineur sur glace[3] rapproche les bras de son corps lors d'une pirouette. Cela a pour effet de diminuer son moment d'inertie, ce qui, par conservation du moment cinétique[4], implique une plus grande vitesse de rotation.
De même, les enfants jouant à mettre en rotation un tourniquet en courant à ses côtés atteignent une vitesse de rotation limitée par leur course. Ils peuvent cependant ensuite sauter sur le tourniquet en mouvement, puis se positionner en son centre, augmentant ainsi significativement la vitesse de rotation initialement obtenue.
Cas général : tenseur d'inertie
La notion de moment d'inertie a été mise en évidence à partir du mouvement de rotation autour d'un axe fixe d'un solide. Or le mouvement général d'un solide par rapport à un référentiel (R) quelconque peut se décomposer en celui de son centre d'inertie C (affecté de la masse totale du système) et un mouvement de rotation propre autour de C dans le référentiel lié à ce point, en translation par rapport à (R), appelé référentiel barycentrique (noté (R*))[5]
Il est alors possible d'exprimer comme précédemment le moment cinétique et l'énergie cinétique propres du système, c'est-à-dire évalué dans (R*), notés respectivement [6] et , ce qui permet de mettre également en évidence une grandeur ne dépendant que de la géométrie des masses du solide, et généralisant la notion précédente, qui ne se réduit cependant plus à une grandeur scalaire mais sera représenté par un tenseur, le tenseur d'inertie (appelé aussi opérateur ou matrice d'inertie).


Mise en évidence et définition du tenseur d'inertie
Le moment cinétique propre d'un solide de vecteur rotation instantané s'écrit :

- ,

Il est possible d'exprimer par exemple la composante suivant x en coordonnées cartésiennes, ce qui donne :
- .

Dans cette expression, les facteurs entre parenthèses représentent respectivement le moment d'inertie du solide par rapport à l'axe Ox, noté , et deux termes homogènes à un moment d'inertie, appelés produits d'inertie, notés et . Il est possible d'écrire sous la forme :




- ,

et en procédant de même pour les autres composantes il vient finalement l'expression du moment cinétique propre sous la forme :
- ,

avec tenseur (ou opérateur) d'inertie, qui est défini par :

- ,

expression dans laquelle les éléments diagonaux sont les moments d'inertie du solide par rapport aux divers axes, et les éléments non diagonaux sont les produits d'inertie. De même, l'énergie cinétique propre s'écrit : .

Il est clair que ne dépend que de la géométrie des masses du solide. Il découle des relations précédentes que dans le cas général le moment cinétique propre du système n'est pas colinéaire à l'axe instantané de rotation, les relations précédentes généralisant celles obtenues dans le cas de la rotation autour d'un axe fixe[7].
Le moment d'inertie par rapport à un axe quelconque, de direction donnée par le vecteur unitaire est alors donné par .


Expression générale du tenseur
Il est facile de montrer que est effectivement un tenseur. En effet, en adoptant la notation il est possible de remarquer que la composante de se met sous la forme suivante[8] :


- .

Le premier terme est le produit d'un scalaire (le moment d'inertie par rapport au point O, ) par un tenseur (le tenseur de Kronecker ). Le second terme correspond à une somme dans lequel chaque terme correspond au produit d'un scalaire (la masse mi) par . Or il s'agit là des composantes du tenseur résultant du produit tensoriel du vecteur par lui-même, donc celles d'un tenseur. Par suite est donc bien un tenseur d'ordre deux[9] : ceci était nécessaire de façon à assurer le caractère invariant par changement du système de coordonnées des expressions précédentes de et . Ce tenseur est évidemment symétrique.



Axes principaux d'inertie et éléments de symétrie matérielle du solide
Du fait de son caractère symétrique il est toujours possible de choisir un système d'axe tel que la matrice représentant soit diagonale[10]. De tels axes sont dits axes principaux d'inertie. Les moments d'inertie correspondants sont appelés moments principaux d'inertie, et sont notés . Leurs valeurs dépendent de la forme géométrique du solide et de la distribution de la masse en son sein, donc de l'expression que prend sa masse volumique en chaque point du solide. Pour un solide homogène ρ est constante, et les moments principaux d'inertie ne dépendent alors que de la forme géométrique du solide.


En général un solide quelconque possède trois moments principaux d'inertie différents, il est appelé toupie asymétrique[11]. Si deux moments principaux d'inertie sont égaux, par exemple , le corps est qualifié de toupie symétrique, et si tous les moments principaux sont égaux, de toupie sphérique. Par exemple un parallélépipède homogène quelconque sera une toupie asymétrique, un cône ou un cylindre homogène une toupie symétrique et une sphère homogène une toupie sphérique. La Terre, du fait de son aplatissement aux pôles, est également en général considérée comme une toupie symétrique.

La présence d'éléments de symétrie matérielle simplifie grandement la recherche des axes principaux d'inertie. En effet en présence de tels éléments certains produits d'inertie, par nature impairs par réflexions, s'annulent, ce qui permet de diagonaliser facilement la matrice représentant .
Un élément de symétrie (point, axe, plan) matérielle est non seulement un élément par rapport auquel le solide est géométriquement symétrique, mais aussi pour lequel sa masse volumique présente la même symétrie. Ainsi un cylindre homogène comporte-t-il un axe de symétrie matérielle (son axe), par lequel passe une infinité de plans de symétrie matérielle, ainsi qu'un autre plan de symétrie matérielle qui est celui perpendiculaire à son axe passant par le milieu du cylindre. En revanche, si le cylindre est constitué de deux demi-cylindres tous deux homogènes, mais de masses volumiques différentes, accolés dans un plan contenant leurs axes, le cylindre possède toujours le plan de symétrie matérielle précédent, mais son axe n'est plus axe de symétrie matérielle. En revanche le plan de symétrie commun des deux demi-cylindres est toujours plan de symétrie matérielle du système.
Il est possible de montrer compte tenu des expressions précédentes des produits d'inertie les propriétés suivantes[12] :
- Tout axe de symétrie matérielle est axe principal d'inertie;
- Tout axe perpendiculaire à un plan de symétrie matérielle est axe principal d'inertie;
Ainsi un cylindre homogène a pour axes principaux d'inertie son axe ainsi que tout axe qui y est perpendiculaire, passant par son centre. Par suite, deux des moments principaux d'inertie sont égaux et le tenseur d'inertie prend dans cette base la forme suivante :
- . Il s'agit donc d'une toupie symétrique.

Relation avec le moment quadrupolaire d'une distribution de masses
Le potentiel de gravitation créé par une distribution quelconque de points matériels de masses ne se ramène pas en général à la forme obtenue dans le cas d'une distribution de masse à symétrie sphérique. Toutefois la plupart des corps célestes (étoile, planètes…) possède approximativement cette symétrie et les écarts à la sphéricité demeurent faibles. Ces écarts sont évidemment liés à la répartition de la matière au sein de la distribution de masse, et donc doivent être (au moins pour les premières corrections) en relation avec le tenseur d'inertie de la distribution (assimilée à un solide parfait dans la suite) : de fait il est possible de montrer facilement que la première correction non nulle au potentiel sphérique fait intervenir une grandeur tensorielle, le tenseur de moment quadrupolaire de la distribution de masse, dont les composantes s'expriment de façon simple en fonction de celles du tenseur d'inertie.
De façon générale à grande distance d'une distribution de masse le potentiel créé peut se mettre sous la forme d'un développement multipolaire : chaque point matériel constituant la distribution (de masse totale ), repéré par le vecteur par rapport à une origine O génère en le potentiel



- ,

dans lequel est l'angle entre et et est le polynôme de Legendre d'ordre k.



Comme r>>ri il est possible de se limiter aux 3 premier termes, ce qui donne :
- ,

ce qui compte tenu de devient :

- .

Le potentiel créé par la distribution en M est égale à la somme des potentiels , et chacun des trois termes se met alors sous la forme :

- terme d'ordre 0 ou polaire : . C'est le potentiel à symétrie sphérique créé par une masse ponctuelle M à l'origine O ;
- terme d'ordre 1 ou dipolaire : , or en prenant pour origine le centre de masse du système, , et le terme dipolaire est nul[13] ;
- terme d'ordre 2 ou quadrupolaire : .




Ce dernier terme est donc la première correction, a priori non nulle, traduisant la non-sphéricité à grande distance du potentiel de gravitation créé par une distribution de masse. La somme sur i qui apparaît dans celui-ci peut être réécrite sous la forme :
- ,

où est le moment quadrupolaire de la distribution de masse :

- ,
- Chaque composante de ce tenseur se met donc sous la forme : , et compte tenu de l'expression générale des composantes du tenseur d'inertie d'un solide il vient finalement l'expression générale[14] : ,
- où désigne la trace de la matrice représentant le tenseur d'inertie, c'est-à-dire la somme de ses termes diagonaux[15].




Les axes principaux d'inertie, pour lesquels la matrice représentant est diagonale, constituent également une base dans lequel est également diagonale, il vient pour les composantes de ce dernier l'expression .

Dans le cas où la distribution de masse est à symétrie sphérique tous les moments principaux d'inertie sont égaux, et alors . Ce résultat est physiquement évident, et en fait dans ce cas tous les termes d'ordre supérieur du développement multipolaire précédent sont également nuls.

Une planète comme la Terre se comporte comme une toupie symétrique pour laquelle [16], l'axe principal d'inertie selon Oz correspondant pratiquement à son axe de rotation. Dans ce cas d'après les formules précédentes le potentiel gravitationnel à grande distance se met sous la forme :

- , où est l'angle entre la direction de et celle de l'axe principal d'inertie Oz.


Ellipsoïde d'inertie
Le moment d'inertie d'un solide quelconque de tenseur d'inertie par rapport à un axe quelconque dont la direction est donnée par le vecteur unitaire est donné par :
- ,
en posant cette relation peut se mettre sous la forme :

- ,

en explicitant avec les composantes de ce vecteur, il vient l'équation d'un ellipsoïde :

- ,

laquelle prend dans les axes principaux d'inertie une forme particulièrement simple :
- .

Cet ellipsoïde est appelé ellipsoïde d'inertie[17]. Dans le cas d'une toupie symétrique, il s'agit d'un ellipsoïde de révolution, et dans le cas d'une toupie sphérique, d'une sphère. Cette notion n'a plus en général aujourd'hui qu'un intérêt historique, toutefois il est intéressant de remarquer que les axes principaux d'inertie sont les axes principaux de l'ellipsoïde d'inertie.
Moments d'inertie particuliers
Pour les exemples suivants, nous considérerons des solides homogènes ( constant) et de masse .

Boule
Pour une boule homogène de rayon et de centre , les moments d'inertie au centre de la boule par rapport aux trois axes sont égaux. On peut donc écrire :



En désignant par la masse volumique, donc :


Comme la masse de la boule est , on obtient[18] :

- .

Sphère (creuse)
Pour une sphère (par parenthèses une sphère est une surface, donc creuse), comme pour une boule, les moments d'inertie passant par son centre sont égaux. En l'occurrence, si son rayon est , on a[19] :

Barre
Dans le cas d'une barre de section négligeable et de longueur , le moment d'inertie selon un axe perpendiculaire à la barre est, en son centre :

- , (avec )


Ici, exprime une masse linéique (masse par unité de longueur).
Cela est vrai si l'axe de rotation passe par le milieu de la barre. La formule est différente si l'axe de rotation passe par son extrémité.
Carré
Dans le cas d'un carré de côté , le moment d'inertie selon un axe perpendiculaire au plan du carré est, en son centre :

- , (avec )


Ici, exprime une masse surfacique (masse par unité de surface).
Rectangle
Dans le cas d'un rectangle de grand côté et de petit côté , le moment d'inertie selon un axe perpendiculaire au plan du rectangle (ici l'axe Oz) est, en son centre[20] :


- , (avec )


Ici, exprime une masse surfacique (masse par unité de surface) pour une surface homogène, elle ne dépend donc pas de x et y. Remarquons que si , on se ramène au cas du carré.

Parallélépipède
Dans le cas d'un parallélépipède de hauteur , de grand côté et de petit côté , le moment d'inertie selon l'axe le long de sa hauteur et en son centre est le même que celui pour un rectangle. En d'autres termes, la hauteur du parallélépipède ne joue aucun rôle[19] :


Cylindre plein
On utilisera les coordonnées cylindriques pour simplifier les calculs. Dans le cas d'un cylindre de rayon et de hauteur , le moment d'inertie selon l'axe de révolution Oz du cylindre est[21] :
- , (avec )


Ici, exprime une masse volumique (masse par unité de volume).
On peut également déterminer le moment d'inertie selon tout axe Ox perpendiculaire à l'axe de révolution Oz du cylindre. Il vaut[22] :

Cylindre creux
Dans le cas d'un cylindre creux de rayons intérieur et extérieur , et de hauteur , le moment d'inertie selon l'axe du cylindre est[23] :


- , (où la masse du cylindre )


Ici, exprime une masse volumique (masse par unité de volume).
Cône
Pour un cône (plein) dont la base a un rayon , son moment d'inertie le long de sa hauteur est[19] :
- , avec .


A noter que l'expression du moment d'inertie en fonction de sa masse et du rayon de sa base ne dépend pas de la hauteur du cône.


Anneau fin
Pour un anneau fin (d'épaisseur négligeable) de rayon et de densité linéique (masse par unité de longueur) , tous les éléments sont à la même distance de l'axe donc :


Théorème de transport (ou théorème de Huygens-Steiner)
Soit l'axe passant par le centre de masse d'un objet de masse , et un axe parallèle à et distant de . En calculant comme précédemment le moment d'inertie, on retrouve la relation établie par Christian Huygens connue sous le nom de théorème de transport[25] ou théorème de Huygens ou théorème de Steiner ou théorème des axes parallèles qui donne le moment d'inertie en fonction de :




À l'énergie cinétique de rotation propre d'un corps, s'ajoute celle de « translation » circulaire du centre de masse auquel on a affecté la masse totale du solide.
Une conséquence immédiate du théorème de Huygens est qu'il est moins coûteux (en énergie) de faire tourner un corps autour d'un axe passant par le centre de masse.
Notes et références
- En effet est nécessairement perpendiculaire à , qui lui-même est colinéaire à l'axe , O étant situé sur cet axe.
- Résolution 8 de la 20e CGPM (1995), bipm.org.
- Il s'agit là d'un système déformable, mais pour lequel on peut considérer que la vitesse angulaire de rotation à un instant donné est la même pour tous les points du système, cf. remarque précédente.
- le patineur dépensant autant d'énergie.
- Voir notamment Perez, Mécanique, 6e édition, Masson, Paris, 2001. Cette décomposition entre mouvement du centre d'inertie et mouvement propre dans le référentiel barycentrique est générale pour tout système de points matériels, comme l'expriment les deux théorèmes de Koenig pour le moment cinétique et l'énergie cinétique. Ce qui caractérise le mouvement du solide, c'est le fait qu'à un instant donné tous ses points ont même vecteur rotation . Ce vecteur rotation instantané à un caractère « absolu » : il peut être interprété comme le vecteur rotation entre le référentiel rigidement lié au solide et le référentiel barycentrique, mais il ne sera pas modifié si l'on considère un autre référentiel non lié au solide : voir sur ce point Lev Landau et Evgueni Lifchits, Physique théorique, t. 1 : Mécanique [détail des éditions] paragraphe §31.
- Ces deux grandeurs s'écrivent et , avec vecteur vitesse du point par rapport au référentiel barycentrique (R*). Il est facile de montrer que le moment cinétique propre ne dépend pas du point choisi pour origine. En effet soit deux points quelconques O et P, il vient aussitôt puisque d'après les propriétés du centre d'inertie , C étant immobile dans (R*).
- Il est facile de vérifier que si garde une direction fixe dans l'espace, par exemple si , les expressions précédentes se ramènent effectivement à et .
- Voir par exemple Lev Landau et Evgueni Lifchits, Physique théorique, t. 1 : Mécanique [détail des éditions], §32 et Herbert Goldstein, Charles P. Poole Jr. et John L. Safko, Classical Mechanics [détail des éditions], chapitre 5.
- Aucune distinction n'a été faite entre composante covariante ou contravariante du tenseur ici, dans la mesure où l'on opère dans un système de coordonnées orthonormées en général.
- Il est ici fait une distinction, par souci de rigueur entre le tenseur , objet mathématique abstrait, et la matrice 3X3 qui correspond à son écriture dans une base donnée, de la même façon qu'il est nécessaire de distinguer un vecteur de ses composantes dans une base particulière, dont les valeurs dépendent du choix de cette base.
- Voir pour ces appellations, Landau, op. cit. et Goldstein, op. cit..
- Voir par exemple Perez, op. cit., chapitre 17.
- Cette situation est très différente d'une distribution de charges, où du fait des différences de signe les « centres de charge » positif et négatif ne coïncident pas toujours, et donc le terme dipolaire ne peut pas être éliminé par un simple choix d'origine.
- Cf. Lev Landau et Evgueni Lifchits, Physique théorique, t. 2 : Théorie des champs [détail des éditions], chapitre 12, §99.
- Celle-ci peut aussi s'écrire en utilisant la convention de sommation sur les indices répétés d'Einstein, il s'agit de la contraction du tenseur d'inertie, par nature invariante.
- Il s'agit d'une toupie « aplatie aux pôles », donc la matière est « plus éloigné » de l'axe Oz que des deux autres axes d'inertie, perpendiculaire à celui-ci contenus dans le plan équatorial, d'où un plus grand moment principal d'inertie selon Oz. La différence n'est cependant de l'ordre que de 0,3 %.
- Cf. Goldstein, op. cit., chapitre 5.
- Gieck et Gieck 1997, M3(m23).
- Commission romandes des mathématique, de physique et de chimie, Formulaires et tables : mathématiques, physique, chimie, Éditions G d'Encre, , 290 p. (ISBN 978-2-940501-41-0), p. 140
- Gieck et Gieck 1997, I18(i215).
- Gieck et Gieck 1997, M3(m17a).
- Gieck et Gieck 1997, M3(m17b).
- Gieck et Gieck 1997, M3(m19).
- Gieck et Gieck 1997, M3(m25).
- Fascicule de L'Université de Liège, Faculté des Sciences Appliquées, Résistance des matériaux et mécanique du solide exercices, 1999, Pro. S. Cescotto (point 3.B.)












Voir aussi
Bibliographie
- Perez, Cours de physique : mécanique - 6e édition, Masson, Paris, 2001, chapitre 17;
- Herbert Goldstein, Charles P. Poole Jr. et John L. Safko, Classical Mechanics [détail des éditions], chapitre 5;
- K. Gieck et R. Gieck (trad. G. Bendit), Formulaire technique, Gieck Verlag, ;
- Lev Landau et Evgueni Lifchits, Physique théorique, t. 1 : Mécanique [détail des éditions], chapitre 6.
Articles connexes
 Portail de la physique
Portail de la physique