Résistance des matériaux
La résistance des matériaux (RDM) est une discipline particulière de la mécanique des milieux continus, permettant le calcul des contraintes et déformations dans les structures des différents matériaux (machines, génie mécanique, bâtiment et génie civil).
Pour les articles homonymes, voir Résistance.


La RDM permet de ramener l'étude du comportement global d'une structure (relation entre sollicitations — forces ou moments — et déplacements) à celle du comportement local des matériaux la composant (relation entre contraintes et déformations). L'objectif est de concevoir la structure suivant des critères de résistance, de déformation admissible et de coût financier acceptable.
Lorsque l'intensité de la contrainte augmente, il y a d'abord déformation élastique (le matériau se déforme proportionnellement à l'effort appliqué et reprend sa forme initiale lorsque la sollicitation disparaît), suivie parfois (en fonction de la ductilité du matériau) d'une déformation plastique (le matériau ne reprend pas sa forme initiale lorsque la sollicitation disparaît, il subsiste une déformation résiduelle), et enfin rupture (la sollicitation dépasse la résistance intrinsèque du matériau).
Histoire
|
.tif.jpg.webp)
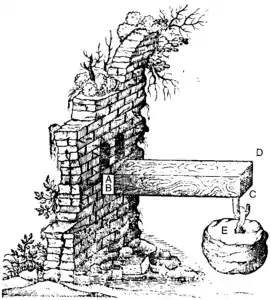
En 1638, Galilée publie Discorsi e Dimostrazioni matematiche intorno à due nuove scienze attenenti alla mecanica e i movimenti locali (Discours concernant deux sciences nouvelles). Dans ce discours, Galilée étudie et est le premier à théoriser la résistance des matériaux et le mouvement des corps. Il s'intéresse à la résistance d'une poutre en console soumise à l'action d'un poids situé à son extrémité. Il montre que le fonctionnement de la poutre-console pouvait être assimilée à un levier coudé s'appuyant au droit de l'encastrement. L'action de la partie du levier comprise entre la section d'encastrement et la charge est équilibrée par la partie du levier correspondant à la section d'encastrement. Cette approche va permettre de changer la manière d'aborder les problèmes de résistance des structures. Cependant Galilée commet une erreur car il admet que la contrainte de traction dans toute la hauteur de la section d'encastrement est uniforme[1].
En 1678, Robert Hooke énonce la loi qui porte son nom (loi de Hooke) qui indique que la déformation d'un corps sous une contrainte inférieure à la limite d'élasticité est proportionnelle à l'effort exercé.
Edme Mariotte reprend les études de flexion des poutres. Il montre que la résistance estimée à partir de la théorie de Galilée pour une poutre en console était exagérée. Il montre dans ses essais que la fibre inférieure de la poutre en console est comprimée, que la fibre supérieure est tendue et que la valeur de la résistance en compression et en traction sont identiques. Cette étude de la flexion des poutres est publiée en 1686 après la mort de Mariotte par Philippe de La Hire.
Jacques Bernoulli étudia la déformation de l'elastica, ligne élastique qui se déforme en flexion sans contraction ni extension, et montra que le moment de flexion est proportionnel à la courbure correspondante de la tige. Vers 1750, Leonhard Euler émit la première théorie des poutres. Daniel Bernoulli écrivit l'équation différentielle pour l'analyse vibratoire. L'étude de l'elastica l'a conduit à la théorie de la stabilité élastique.
Charles-Augustin Coulomb, appliquant la loi de Hooke pour une section finie de poutre, proposa une théorie de la flexion.
Thomas Young a reconnu que le cisaillement était une déformation élastique et remarqua que la résistance élastique au cisaillement était différente de la résistance élastique à la traction-compression pour une même substance. Il introduisit le concept de module d'élasticité d'une substance, devenu le module de Young.
Le , Henri Navier présenta le Mémoire sur les lois de l'équilibre et du mouvement des corps solides élastiques[2] à l'Académie des sciences dans lequel il recherchait les équations d'équilibre des solides élastiques en utilisant une « théorie de mécanique moléculaire ». En supposant le milieu isotrope, il aboutissait à des équations d'équilibre pour des solides élastiques. Il ne faisait intervenir qu'une seule constante semblable au module de Young. Navier était professeur suppléant de mécanique appliquée à l'école des ponts et chaussées en 1819 et est devenu professeur titulaire en 1831. Siméon Denis Poisson s'est opposé à la théorie de Navier entre 1828 et 1829.
En 1822, Augustin Louis Cauchy, dans une communication à l'Académie des sciences, introduisit le concept de contrainte et explicitait la notion de déformation décrite par ses six composantes ou par les axes principaux des déformations et les extensions principales qui leur correspondaient. Cauchy écrivit les équations d'équilibre en contraintes et souhaitait aboutir aux déplacements correspondant à cet état d'équilibre d'un solide supposé élastique. Il supposa que les matériaux étaient isotropes et ayant une relation contrainte-déformation, que les directions principales des contraintes et des déformations coïncidaient. Il introduisit deux constantes matérielles pour écrire les équations d'équilibre d'un corps élastique exprimées en déplacements.
C'est George Green qui introduisit une approche énergétique pour écrire les équations d'équilibre.
Adhémar Barré de Saint-Venant présenta à l'Académie des sciences plusieurs mémoires sur la résistance, la flexion et la torsion des corps solides.
La théorie mathématique de l'élasticité des corps solides a été développée par Siméon Denis Poisson (1812), Augustin Louis Cauchy (1823), Gabriel Lamé (1833-1852).
Le premier cours de Résistance des Matériaux est donné par August Wöhler à l'université de Göttingen en 1842.[réf. nécessaire] À la suite d'expériences, Wöhler montre l'influence des charges répétées et alternées sur la résistance des matériaux.
Karl Culmann va développer le principe du calcul des systèmes réticulaires dans l'hypothèse des nœuds articulés en 1852 pour aboutir à la statique graphique. Maurice Lévy développe cette méthode de calculs.
Émile Clapeyron, à partir de la théorie de l'élasticité établit les équations de Clapeyron pour le calcul des poutres continues en 1857 et écrit en 1858 son mémoire sur le travail des forces élastiques.
En 1864, James Clerk Maxwell énonce le principe de réciprocité des déplacements des points d'application des forces extérieures, cas particulier du théorème de réciprocité de Maxwell-Betti.
Emil Winkler développe la méthode de calcul des lignes d'influence et le calcul des efforts secondaires dans les systèmes réticulaires (1860-1867).
Menabrea établit le principe du travail élastique minimum, en 1868.
Christian Otto Mohr établit le calcul des systèmes articulés à barres surabondantes par application du travail virtuel (1874).
Castigliano démontre le théorème des dérivées du travail (1875).
La théorie de l'arc élastique est développée à partir de la théorie de Culmann et des équations de Bresse.
Démarche générale
La résistance des matériaux est utilisée pour concevoir des systèmes (structures, mécanismes) ou pour valider l'utilisation de matériel. On se place dans le cas d'une déformation réversible : une déformation irréversible (déformation plastique ou rupture) rendrait la pièce inopérante. Il faut donc vérifier deux choses :
- Que l'on reste bien dans le domaine élastique, par l'application d'un critère de ruine : c'est la vérification de l'état limite ultime (ELU).
- Que la déformation élastique sous charge est compatible avec la fonction de la pièce : c'est la vérification de l'état limite en service (ELS).
Pour effectuer les calculs de validation, il faut passer par une étape de modélisation :
- étude statique : détermination des efforts extérieurs auxquels est soumise la pièce étudiée ;
- modélisation du matériau : cela consiste à déterminer des valeurs caractéristiques du matériau par des essais mécaniques, en particulier l'essai de traction ; on s'intéresse en général à la limite d'élasticité pour l'ELU, et au module de Young pour l'ELS ;
- modélisation de la pièce : pour des calculs à la main, on utilise des modèles simples (poutre pour des pièces élancées, plaques ou coques pour des pièces minces) ; le calcul par ordinateur (éléments finis) utilise un modèle numérique de la structure (dans un logiciel de CAO).


L'application des lois de l'élasticité permet de déterminer le tenseur des contraintes. On compare ensuite les valeurs des contraintes avec les limites d'élasticité du matériau, en utilisant un « critère de ruine », pour valider ou invalider à l'ELU.
Les lois de l'élasticité permettent également de déterminer le champ de déplacement, ce qui permet de valider ou d'invalider à l'ELS.
Hypothèses de la résistance des matériaux
Dans son utilisation courante, la RDM fait appel aux hypothèses suivantes :
Le matériau est :
- élastique (le matériau reprend sa forme initiale après un cycle chargement déchargement),
- linéaire (les déformations sont proportionnelles aux contraintes),
- homogène (le matériau est de même nature dans toute sa masse),
- isotrope (les propriétés du matériau sont identiques dans toutes les directions).
Le problème est :
- en petits déplacements (les déformations de la structure résultant de son chargement sont négligeables et n'affectent pratiquement pas sa géométrie),
- quasi statique (pas d'effet dynamique),
- quasi isotherme (pas de changement de température).
Ces simplifications permettent de faire des calculs simples et rapides, automatisés (par ordinateur) ou à la main. Elles sont toutefois parfois inadaptées, en particulier :
- on utilise fréquemment des matériaux fortement hétérogènes ou anisotropes, comme les matériaux composites, le bois, le béton armé ;
- certaines applications impliquent des déformations élastiques importantes, notamment avec des matériaux souples (matériaux composites, polymères), on n'est alors plus dans le domaine linéaire ni dans celui des petits déplacements.
Notons enfin que la déformation plastique est un « mécanisme de protection » contre la rupture, en dissipant l'énergie de déformation. Sa prise en compte dans les aciers permet de concevoir des structures métalliques plus légères (par exemple Annexe 80 des Règles de calcul des constructions en acier CM66) ; ceci appartenant encore au cadre non linéaire et des grands déplacements.
La déformation reste néanmoins toujours limitée ; le domaine des très grandes déformations appartient plutôt au cadre de la rhéologie.
Notion de poutre
L'ingénieur utilise la résistance des matériaux avant tout pour déterminer les dimensions des éléments de construction et vérifier leur résistance et leur déformation. L'un des éléments structurels le plus fréquent est la poutre, c'est-à-dire un objet de grande longueur par rapport à sa section, chargée dans son plan moyen de symétrie.
Sollicitations
Sollicitations élémentaires
| Type | Commentaire | Exemple |
|---|---|---|
| Traction | Allongement longitudinal, on tire de chaque côté | Barre de remorquage |
| Compression | Raccourcissement, on appuie de chaque côté | Poteau supportant un plancher |
| Cisaillement | Glissement relatif des sections | Goujon de fixation |
| Torsion | Rotation par glissement relatif des sections droites | Arbre de transmission d'un moteur |
| Flexion simple | Fléchissement sans allongement des fibres contenues dans le plan moyen | Planche de plongeoir |
| Flexion pure ou circulaire | Fléchissement sans effort tranchant dans certaines zones | Partie de poutre entre deux charges concentrées ou soumise à un couple |
Principes fondamentaux de la théorie des poutres
Deux des dimensions de la poutre sont petites par rapport à la troisième. En d'autres termes les dimensions de la section droite sont petites par rapport à la longueur de la poutre. Ce principe permet d'approximer la poutre par une ligne (droite ou courbe) et des sections droites.
En général, une longueur ou une distance de l'ordre de deux à trois fois la plus grande dimension de la section droite est considérée suffisante pour appliquer le modèle RDM.
Le principe de Saint-Venant précise que le comportement en un point quelconque de la poutre, pourvu que ce point soit suffisamment éloigné des zones d'applications des forces et des liaisons, est indépendant de la façon dont sont appliquées les forces et de la façon dont sont physiquement réalisées les liaisons ; le comportement dépend alors uniquement du torseur des forces internes en ce point. La conséquence est que les contraintes produites par un système de forces dans une section éloignée du point d'application de ces forces ne dépendent que de la résultante générale et du moment résultant du système de forces appliquées à gauche de cette section[3].
Le modèle RDM n'est plus valide lorsque le principe de Saint Venant n'est pas satisfait, c'est-à-dire à proximité des liaisons, des appuis ou des points d'application des forces. Dans ces cas particuliers, il faut appliquer les principes de la mécanique des milieux continus.
Le principe de Navier-Bernoulli précise que les sections droites le long de la fibre moyenne[4] restent planes après déformation. Les déformations dues à l'effort tranchant montrent que les sections droites ne peuvent pas rester planes mais subissent un gauchissement. Pour tenir compte de ce fait l'énoncé de ce principe peut prendre la forme suivante: deux sections droites infiniment voisines deviennent après déformation deux sections gauches superposables par déplacement. Comme ce déplacement est petit, on peut considérer que les allongements ou raccourcissements de tout tronçon de fibre sont des fonctions linéaires des coordonnées de la fibre dans le plan de la section[3].
La loi de Hooke précise que, dans le domaine élastique du matériau, les déformations sont proportionnelles aux contraintes.
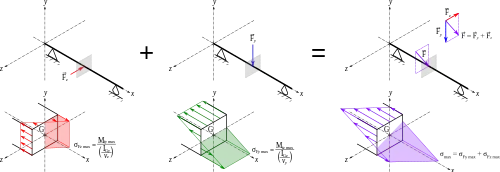
Le principe de superposition permet de décomposer toute sollicitation complexe en une somme de sollicitations élémentaires dont les effets sont ensuite additionnés. Ce principe est directement lié à l'hypothèse de linéarité de la loi de Hooke.
L'équilibre statique d'un système exige que :
- La somme des forces extérieures en tout point est égale au vecteur nul :
. - La somme des moments calculés en tout point est égale au vecteur nul :
.


Le théorème de Castigliano définit le déplacement du point, lieu d'application d'une force, par la dérivée du potentiel élastique par rapport de cette force.
Quelques notations et définitions
La terminologie employée suivant la grandeur étudiée dépend du point de vue par rapport à la pièce étudiée.
| Grandeur | Point de vue extérieur | Point de vue intérieur |
|---|---|---|
| Mécanique | Efforts | Contraintes |
| Géométrique | Déplacements[5] | Déformations |
Les efforts (ou chargement) regroupent les forces (en multiples du newton (N)) et les moments (en multiples du newton mètre (N m)). Les déplacements sont l'ensemble des translations (en unités de longueur compatibles avec celles utilisées pour les moments) et des rotations (en radians).
Loi de Hooke simplifiée à une seule dimension
La contrainte normale est proportionnelle à l’allongement relatif et un facteur constant désigné sous le nom de module d'élasticité ou encore module de Young (valable uniquement pour les petits déplacements) :



- est une contrainte qui s'exprime le plus souvent en MPa ou N/mm2 ;
- est homogène à une contrainte ;
- est sans dimension.
L’allongement relatif est le rapport entre l'allongement ( - ) et la longueur initiale :



Traction / Compression
Cette contrainte est dite contrainte normale due à la force de traction. est égale à l'intensité de la force divisée par l'aire de la surface normale à cette force :



avec la section initiale (avant déformation). est aussi appelée contrainte PK1.
Le critère de résistance est rempli lorsque la contrainte maximale reste inférieure à la contrainte limite. La première correspond à la contrainte calculée ci-dessus, éventuellement multipliée par divers facteurs tels que :
- un facteur de concentration de contraintes qui dépend de la géométrie de la poutre (ex : pour une vis à filets triangulaires ) ;
- un facteur d'amplification dynamique ;
- divers autres facteurs de sécurité (sur les sollicitations).


La contrainte limite correspond généralement à la limite élastique , éventuellement divisée par des facteurs de sécurité (sur la résistance) (ex : pour les gaines d'un ascenseur ).


Flexion
Sous l'effet du moment de flexion (en N m), la contrainte de flexion à une distance (en m) de la fibre neutre s'exprime en fonction du moment quadratique (en m4) de la section étudiée par la relation :




avec

le moment quadratique, qui est habituellement désigné par inertie de la section par rapport à l'axe du moment de flexion.
- Pour une section rectangulaire de base et de hauteur :
. - Pour une section circulaire de diamètre :
.





Le théorème de Huygens permet de calculer le moment quadratique d'une section coupée en plusieurs morceaux. Pour chaque morceau, son moment par rapport à un axe arbitraire dépend de son moment par rapport à l'axe de gravité parallèle à , à sa section et la distance entre les axes et selon l'expression :



Cisaillement

avec le module de cisaillement (homogène à une contrainte)

Pour avoir la contrainte tangentielle maximale :
- pour une section rectangulaire :
- pour une section circulaire :


Torsion
Ce qui suit concerne uniquement les poutres à sections circulaires.

où est l'angle unitaire de torsion (en rad/m). La rotation de la barre en un point d’abscisse est donc .



Le moment quadratique polaire de la section est donné par :


La contrainte de cisaillement maximale est


Étude de la déformation d'une poutre fléchie
On peut obtenir l'allure de la déformée de la poutre en flexion à partir de l'équation différentielle

En intégrant 2 fois, et en déterminant les constantes selon les conditions aux limites, il est possible de trouver la forme de la déformée de la poutre en flexion.
Références théoriques
- La contrainte normale : contrainte
- L’allongement relatif : tenseur des déformations
- Le déplacement latéral relatif : tenseur des déformations
- Le module d’élasticité longitudinal ou module de Young : module de Young
- Le module de cisaillement ou le module d’élasticité tangentiel ou encore module de glissement : module de cisaillement
- Le coefficient de Poisson : coefficient de Poisson


Dans la résistance des matériaux, les contraintes normales ne sont dues qu'à l'effort normal et aux moments de flexion. Dans la théorie des poutres, les contraintes normales dans une section droite sont calculées dans un repère Gxyz où G est le centre de gravité de la section droite, l'axe Gx est tangent à la fibre neutre de la poutre, les repères Gy et Gz sont les axes principaux d'inertie.
Les contraintes normales dans ce repère peuvent être ramenées à des calculs simples ne faisant intervenir que les caractéristiques géométriques de la section droite :
- la surface de la section droite, notée S
- les inerties calculées par rapport aux deux axes principaux Gy et Gz : Moment quadratique plus couramment appelé moment d'inertie ou inertie calculé dans chaque axe principal d'inertie, notés IGy ou Iy et IGz ou Iz.

Pour une section droite symétrique par rapport à un axe principal d'inertie Gy, l'axe Gy est en général l'axe vertical. Il est possible de calculer les contraintes maximales en ne faisant intervenir que les distances maximales du contour de la section droite aux axes principaux d'inertie du repère Gyz.

Contraintes mécaniques composées
| Type | Commentaire | Exemple |
|---|---|---|
| Flexion et torsion | Arbre de transmission | |
| Flexion et traction | Vis | |
| Flexion et compression | Le flambage provoque les mêmes effets | Poteau d'angle |
| Cisaillement et compression | Pile de pont en rivière navigable | |
| Cisaillement et traction | Boulon précontraint |
La poutre est généralement composée d'un matériau isotrope homogène et chargée dans son plan moyen, vertical le plus souvent. Dans ces conditions, l'ensemble des efforts extérieurs appliqué d'un côté d'une section droite quelconque se ramène à :
- un effort longitudinal de compression ou traction : l'effort normal ;
- un effort normal de cisaillement : l'effort tranchant ;
- un moment fléchissant.
Ce sont les éléments de réduction des charges extérieures au droit de la section considérée.
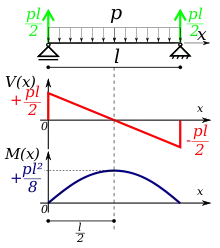
Un cas simple est constitué par une poutre droite, horizontale, de section constante, chargée uniformément et reposant sur deux appuis simples. Si on désigne par la charge constante et linéaire, et par la longueur de la poutre, la détermination des éléments de réduction des efforts tient en quelques formules simples :

- la réaction à chaque appui est une force verticale, égale à la moitié de la charge totale soit ,
- l'effort tranchant varie linéairement de à avec une valeur nulle en milieu de travée. On doit vérifier que la contrainte de cisaillement au voisinage de l'appui reste inférieure à la résistance au cisaillement du matériau,
- Le moment fléchissant est nul sur appui et maximum en milieu de travée où il vaut . On doit vérifier que les contraintes dans la section à mi-travée ne dépassent ni la résistance à la compression, ni la résistance à la traction du matériau.




Notes et références
- « Histoire des Essais mécaniques », sur Dmoz.fr (consulté le ).
- Lire en ligne : Mémoires de l'Académie des sciences de l'Institut de France. 1816-1949, tome VII, p. 375, 1827.
- M. Albigès & A. Coin, Résistance des matériaux, Éditions Eyrolles 1969.
- Ce principe est aussi valable pour les plaques et coques, la fibre moyenne est remplacée par plan moyen.
- Pour l'utilisateur de la structure, le mot déplacement sera le plus souvent remplacé, à juste titre pour lui, par le mot déformation.
Bibliographie
- Henry Lossier, Les progrès des théories de la résistance des matériaux et leur application à la construction des ponts, p. 183-189, Le Génie civil, Numéro spécial du Cinquantenaire 1880-1930, (lire en ligne).
- Albert Caquot, Idées actuelles sur la résistance des matériaux, p. 189-192, Le Génie civil, Numéro spécial du Cinquantenaire 1880-1930, (lire en ligne).
- (en) Stephen Timoshenko, History of strength of materials, Dover publications, New York, 1983 ; p. 452 (ISBN 0-486-61187-6).
Annexes
Articles connexes
Liens externes
- RDM : cours d'initiation en pdf.
- Calculs simples en ligne.
- Dates clef de l'histoire de la RdM, Y. Debard.
- Logiciel libre pyBar.
- Introduction à la résistance des matériaux.
- Calcul statique linéaire pour poutres, Guide de validation des progiciels de calcul de structure, ICAB.
- , Cours résistance des matériaux G. R. Nicolet.
 Portail des sciences des matériaux
Portail des sciences des matériaux  Portail de la physique
Portail de la physique  Portail du génie mécanique
Portail du génie mécanique  Portail du bâtiment et des travaux publics
Portail du bâtiment et des travaux publics