Train à sustentation magnétique
Un train à sustentation magnétique ou Maglev utilise les forces magnétiques pour se déplacer. Il utilise le phénomène de sustentation électromagnétique et n'est donc pas en contact avec des rails, contrairement aux trains classiques. Ce procédé permet de supprimer la résistance au roulement et d'atteindre des vitesses plus élevées : le record est de 603 km/h obtenu en , soit 28,2 km/h de plus que le record d'un train classique (574,8 km/h par une version modifiée du TGV en 2007). Maglev est l'acronyme anglais pour Magnetic levitation.

Principes et technologies
Il existe deux principaux types de trains à sustentation magnétique :
- Le type à sustentation électrodynamique (ou EDS), utilisant des aimants supraconducteurs ou des aimants aux terres rares disposés en réseau de Halbach[1]. Sur le type à aimants supraconducteurs des bobines supraconductrices sont placées dans le train et des électroaimants sont placés le long de la voie. Lorsque le train se déplace, un courant est induit dans la voie. La force résultante fait léviter le train. Le déplacement du train engendre une traînée électromagnétique non négligeable, supérieure à la résistance au roulement d'un système à roue 'acier sur acier'. Sur certains systèmes (InducTrack), cette trainée passe par un maximum puis décroit à haute vitesse. Le projet le plus abouti de type SCMaglev est concrétisé au Japon sur la ligne prototype Shinkansen Chūō.
- Le type à sustentation électromagnétique (ou EMS), utilisant des électroaimants classiques. La traînée électromagnétique est ici très faible, voire nulle. Le Transrapid allemand en est le principal exemple. Le rail « porteur » contient des aimants ou des électroaimants. L'interaction entre les aimants à bord du train et des aimants disposés le long de la voie crée une force magnétique induite qui compense la gravité et permet la lévitation. Ces aimants repoussent le train vers le haut et assurent l'existence d'une garde suffisante entre le "rail" et le train ce qui affranchit le véhicule de toute perte due à la friction. Il apparaît cependant une traînée magnétique. Par ailleurs, aux vitesses élevées, c'est la résistance aérodynamique qui représente de loin la principale résistance à l'avancement.
La propulsion est assurée par un moteur linéaire synchrone.
Histoire
Les débuts des recherches sur les trains à sustentation magnétique commencèrent en 1922 avec les travaux de l'Allemand Hermann Kemper. Celui-ci déposa un brevet le . Ses travaux furent cependant interrompus à cause de la Seconde Guerre mondiale.
- 1962 : le Japon se lance dans des recherches sur le Maglev qui bat régulièrement de nouveaux records de vitesse.
- 1973 : l'Allemagne reprend les recherches à l'université technique de Brunswick.
- 1979 : le Transrapid 05 fut mondialement le premier train à sustentation magnétique à transporter des passagers à l'occasion de l'exposition internationale des moyens de transport (IVA) à Hambourg (photo).
- 1983 : la M-Bahn, une ligne de 1,6 km fut construite à Berlin destinée à un service commercial de type métro (Kabinentaxi). Ouverte en 1989, elle fut fermée en 1991.
- De 1984 à 1995, l'AirRail Link, une liaison de 600 mètres exista entre l'aérogare principal de l'aéroport international de Birmingham jusqu'à la station de chemin de fer à une vitesse de 15 km/h. L'une des raisons de son échec est le poids trop important de la voiture à cause d'une coque trop épaisse. Elle est remplacée en 2003 par un système de câble tirant les wagons.
- 1984 : mise en service de la ligne d'essai pour le Transrapid dans la région appelée Emsland (Pays de l'Ems), (Basse-Saxe, Allemagne).
- 2003 : au Japon, un Maglev MLX01 atteint la vitesse de 581 km/h.
- 2004 : mise en service commercial du Transrapid de Shanghai.
- : accident sur la ligne d'essai de Lathen (Emsland) en Allemagne. Le train percute à près de 200 km/h un véhicule d'entretien stationné sur la voie. La collision a été fatale à 23 personnes sur les 31 passagers qui étaient pour l'essentiel des employés de la société d'exploitation. La technologie semble hors de cause (problème de manque de communication entre les services). Le train n'a cependant pas déraillé.
- : au terme d'une réunion de crise à Berlin, le dernier projet de Transrapid en Allemagne, portant sur la construction d'une ligne entre la gare principale et l'aéroport de Munich, a été enterré d'un commun accord par le gouvernement fédéral allemand et les autorités de Bavière en raison des coûts excessifs[2],[3]. Par suite, ThyssenKrupp et Siemens ont décidé la dissolution de la société de commercialisation Transrapid International, entreprise commune des deux groupes[4]. Une nouvelle tentative de projet de Transrapid en Allemagne n'est pas attendue[5].
- Fin 2011/début 2012, la licence d'exploitation du Transrapid en Allemagne a expiré, la ligne d'essai a fermé, et la destruction/reconversion de l'ensemble du site d'Emsland est approuvée.
- En 2014, selon le Dr Deng Zigang, un projet de Super Maglev permettrait d'atteindre la vitesse de 2 900 km/h grâce aux forces magnétiques. Il s'agit d'une vitesse actuellement théorique, du fait que le prototype actuel est trop petit[6].
- Le , au Japon, un Maglev expérimental atteint la vitesse record de 603 km/h.
Les lignes en fonctionnement
Après près de quarante années de recherche et d'essais, seules six lignes fonctionnent pour une longueur de ligne cumulée d'environ 70 km :
- Le Transrapid de Shanghai, liaison centre-ville-aéroport en Chine à Shanghai de 30 km inaugurée en janvier 2004 ; avec une vitesse maximale de 431 km/h, le trajet est effectué en 7 min 20 s, soit à une vitesse moyenne de 251 km/h, c'est le premier et seul train à sustentation magnétique à grande vitesse en utilisation commerciale.
- Linimo, ligne de 8,9 km à Aichi au Japon, elle a été mise en service en 2005 : avec une vitesse maximale de 100 km/h, le trajet est assuré en 17 minutes, soit à une vitesse moyenne de 31 km/h.
- Une ligne longue de 1 km au parc des expositions de Daejeon, en Corée du Sud, mise en service en [7].
- Le , la ligne de 6,1 km reliant la station Yongyu à l'aéroport d'Incheon en Corée du Sud est mise en service[8].
- La ligne Maglev express de Changsha dans la province du Hunan (Chine), en service depuis , relie la gare de Changsha-Sud à l'aéroport international de Changsha-Huanghua (longueur de 18,6 km, vitesse maximale de 100 km/h, vitesse moyenne de 57 km/h)[9].
- La ligne S1 du métro de Pékin circule depuis sur 8,25 km dans le district de Mentougou, situé dans l'ouest de la capitale chinoise.
 Le Transrapid de Shanghaï, Chine.
Le Transrapid de Shanghaï, Chine. Linimo à Fujigaoka, Japon.
Linimo à Fujigaoka, Japon. UTM - 02 à Daejeon (Corée du Sud).
UTM - 02 à Daejeon (Corée du Sud).
Les lignes abandonnées après avoir fonctionné
- En 1979, le transrapid 05 fut mondialement le premier train à sustentation magnétique à transporter des passagers à l'occasion de l'exposition à Hambourg en Allemagne.
- De 1984 à 1995, la liaison AirRail Link de 600 mètres a fonctionné entre l'aérogare principal de l'aéroport de Birmingham jusqu'à la gare ferroviaire de Birmingham en Angleterre à une vitesse de 15 km/h. Elle a été remplacée par un transport hectométrique.
- De 1989 à 1991, une liaison de 1,6 km, le M-Bahn a fonctionné à Berlin en Allemagne, avant la réunification allemande.
 Le Transrapid 08.
Le Transrapid 08. Le M-Bahn de Berlin photographié en 1990.
Le M-Bahn de Berlin photographié en 1990. Le train à sustentation magnétique de Birmingham.
Le train à sustentation magnétique de Birmingham.
Projets
Projets en cours
Le Japon développe un projet de train appelé Shinkansen Chūō. Sur une ligne d'essai de 42,8 km, située dans la préfecture de Yamanashi, le prototype atteint 590 km/h le [10], puis 603 km/h le suivant[11]. L'objectif est de construire une ligne assurant la liaison Tokyo-Ōsaka (400 km à vol d'oiseau) en une heure (travaux en cours depuis ) ; l'ouverture du premier tronçon Tokyo-Nagoya est prévue en 2027 et celle du second tronçon Nagoya-Osaka en 2037 avec l'aide de fonds publics (à l'origine, l'ouverture était prévue en 2045 pour le second tronçon).
Début 2010, la compagnie JR Central a annoncé[12] vouloir développer le MAGLEV à l'étranger, avec deux compagnies américaines[13]. La compagnie estimait en 2010 que 150 sites dans le monde sont des marchés potentiels pour le Shinkansen ou le SCMaglev, dont entre Tampa, Orlando et Miami, entre Las Vegas et Los Angeles, au Texas et dans le Midwest, ou entre Baltimore et Washington, D.C., entre Chattanooga et Atlanta, ou encore en Pennsylvanie, éventuellement en bénéficiant d'une partie des 8 milliards de dollars promis le par le Président Barack Obama pour des projets innovants et économes en énergie de lignes à grande vitesse.
En Allemagne
Le Transrapid était un projet allemand réalisé par plusieurs sociétés dont Siemens et MBB qui avait réalisé le premier prototype dans les années 1970.
- Le projet de liaison de la gare centrale de Munich avec l'aéroport Franz-Josef-Strauss a été abandonné en 2008[2].
- Un projet de ligne de Berlin à Hambourg avait été approuvé en 1994 mais a aussi été abandonné par la suite, faute de soutien financier de l'État.
En Chine
En Suisse
Le projet futuriste Swissmetro fait appel aux mêmes procédés mais les double par l'utilisation de tunnels sous vide partiel d'air. Ceci a l'avantage de réduire la friction de l'air qui devient très importante au-delà de 150 km/h[14]. Il a été abandonné en 2009.
Technologie
Dans l'imagination du public, un train à sustentation magnétique ou "maglev" évoque souvent le concept d'un monorail en hauteur avec une propulsion par moteur linéaire.
Les systèmes à sustentation magnétique peuvent être monorail ou à double rail – le SCMaglev. MLX01, par exemple, utilise une voie en tranchée – et tous les trains monorail ne sont pas des trains à sustentation magnétique. Certains systèmes de transport ferroviaire incorporent des moteurs linéaires mais n'utilisent l'électromagnétisme que pour la propulsion, sans faire léviter le véhicule. C'est le cas du monorail de Moscou, actuellement le seul train monorail à moteur linéaire sans suspension magnétique en service. De même que les voies ordinaires les voies à sustentation magnétique, monorail ou non, peuvent également être construites au niveau du sol ou installées dans des tunnels. Certains trains a sustentation magnétique intègrent des roues et fonctionnent comme des véhicules à roues à moteur linéaire à des vitesses plus lentes, mais lévitent à des vitesses plus élevées. C'est généralement le cas des trains à sustentation magnétique électrodynamiques. Des facteurs aérodynamiques peuvent également jouer un rôle dans la lévitation de ces trains.

Les deux principaux types de technologie de sustentation magnétique sont
- Une sustentation électromagnétique (EMS), des électroaimants à commande électronique dans le train l'attirent sur une voie magnétiquement conductrice (généralement en acier).
- Une sustentation électrodynamique (EDS) utilise des électro-aimants supraconducteurs ou des aimants permanents puissants qui créent un champ magnétique, lequel induit des courants dans les conducteurs métalliques voisins lors d'un mouvement relatif, ce qui soulève le train vers une position de lévitation fixée par la voie.
Sustentation électromagnétique (EMS)
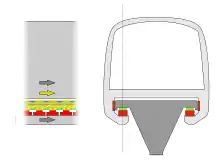
Dans les systèmes de suspension électromagnétique (EMS), le train enveloppe la voie. Des matériaux magnétiques sont disposés sur la partie inférieure de la voie. Des électroaimants sont fixés au train sous la voie et orientés vers le haut pour soulever le train. Le système est généralement disposé sur une série de bras en forme de C, la partie supérieure du bras étant fixée au véhicule, et le bord intérieur inférieur contenant les électroaimants. Le train repose sur la voie uniquement à l'arrêt et un système de contrôle asservi des électroaimants soulève le train lors de la mise en route. Certains systèmes combinent des aimants permanents et des électroaimants afin de diminuer la taille de ceux-ci et de leur électronique de contrôle[17].
L'attraction magnétique varie de manière inverse au carré de la distance, de sorte que des changements mineurs de distance entre les aimants et le rail produisent des variations de forces importantes. Ces changements de force sont dynamiquement instables - un léger écart par rapport à la position optimale a tendance à augmenter, ce qui nécessite des systèmes de rétroaction sophistiqués pour maintenir une distance constante par rapport au rail, (environ 15 mm)[18],[19].
Le principal avantage des systèmes suspendus à électroaimants est qu'ils fonctionnent à toutes les vitesses, contrairement aux systèmes électrodynamiques qui ne fonctionnent qu'à partir d'une vitesse minimale. Cela élimine la nécessité d'un système de train d’atterrissage à basse vitesse et peut simplifier l'aménagement des voies. En revanche, l'instabilité dynamique exige des tolérances de réalisation de la voie très précises, ce qui peut compenser cet avantage. Eric Laithwaite craignait que pour respecter les tolérances requises, il faille augmenter l'écart entre les aimants et le rail au point où les aimants seraient d'une taille déraisonnable[20]. En pratique, ce problème a été résolu grâce à des systèmes de rétroaction améliorés, qui prennent en charge les tolérances requises mais la distance moyenne à la voie est généralement inférieure à celle des systèmes électrodynamiques.
Sustentation électrodynamique (EDS)


Dans une suspension électrodynamique (EDS), la voie est constituée de matériaux conducteurs en principe amagnétiques (cuivre ou aluminium). Le déplacement d'aimants contenus dans le train induit un courant électrique dans la voie et donc un champ magnétique qui interagit avec les champs magnétiques des aimants du train. Le train est mis en lévitation et centré par les interactions entre ces champs magnétiques[21]. Dans certaines configurations, le train ne peut être mis en lévitation que par des forces répulsives. Dans les premiers stades de développement du SCmaglev sur la piste d'essai de Miyazaki, un système purement répulsif a été utilisé puis a évolué vers un système mélangeant forces d'attraction et de répulsion[22]. Le champ magnétique est produit soit par des aimants supraconducteurs (comme dans le SCMaglev), soit par un réseau d'aimants permanents (comme dans la voie de type en:Inductrack). Les forces répulsives et attractives entre la voie et le train sont créés par les champs magnétiques dans la voie obtenus par induction électromagnétique dans des boucles réalisées avec des fils ou des empilements de bandes en matériau conducteur.
L'un des principaux avantages des systèmes Maglev EDS est qu'ils sont dynamiquement stables – les changements de distance entre la piste et les aimants créent de fortes forces pour ramener le système à sa position initiale[20]. En outre, la force d'attraction varie de manière inverse, ce qui permet d'obtenir les mêmes effets de réglage. Aucun contrôle actif de la rétroaction n'est nécessaire mais des résonances sont possibles parce qu'il y a peu d'amortissement.
Cependant, à faible vitesse, le courant induit dans ces bobines et le flux magnétique qui en résulte ne sont pas assez importants pour faire léviter le train. Pour cette raison, le train doit avoir des roues ou une autre forme de train d'atterrissage pour soutenir le train jusqu'à ce qu'il atteigne la vitesse de décollage. Étant donné qu'un train peut s'arrêter à n'importe quel endroit, en raison de problèmes d'équipement par exemple, l'ensemble de la voie doit pouvoir supporter à la fois une exploitation à basse et à haute vitesse.
Un autre inconvénient est que le système EDS crée naturellement un champ dans la voie à l'avant et à l'arrière des aimants de levage, qui agit contre les aimants et crée une traînée magnétique. Ceci n'est généralement préoccupant qu'à basse vitesse, et c'est l'une des raisons pour lesquelles JR a abandonné un système purement répulsif et a adopté le système de lévitation avec des parois latérales[22]. À plus haute vitesse, les autres modes de traînée dominent[20].
La force de traînée peut toutefois être utilisée à l'avantage du système électrodynamique, car elle crée une force variable dans les rails qui peut être utilisée comme système réactionnel pour entraîner le train, sans qu'il soit nécessaire de disposer d'une plaque de réaction séparée, comme dans la plupart des systèmes à moteur linéaire. Laithwaite a dirigé le développement de tels systèmes de "flux transversal" dans son laboratoire de l'Imperial College.[20] Une autre solution consiste à utiliser des bobines de propulsion sur le rail de guidage pour exercer une force sur les aimants du train et faire avancer celui-ci. Les bobines de propulsion qui exercent une force sur le train sont en fait un moteur linéaire : un courant alternatif dans les bobines génère un champ magnétique variant continuellement qui avance le long de la voie. La fréquence du courant alternatif est synchronisée pour correspondre à la vitesse du train. Le décalage entre le champ exercé par les aimants sur le train et le champ appliqué crée une force qui fait avancer le train.
Voies
La conception d'un train à sustentation magnétique ne concerne pas uniquement les véhicules, mais aussi le système ferroviaire, spécifiquement conçu pour la lévitation et la propulsion magnétique. Toutes les mises en œuvre opérationnelles de la technologie à sustentation magnétique ont des roues basiques et ne sont pas compatibles avec les voies ferrées conventionnelles. Comme ils ne peuvent pas partager l'infrastructure existante, les systèmes à sustentation magnétique doivent être conçus comme des systèmes autonomes. Le système à sustentation magnétique SPM est interopérable avec les voies ferrées en acier et permettrait aux véhicules à sustentation magnétique et aux trains conventionnels de circuler sur les mêmes voies. MAN en Allemagne a également conçu un système de train à sustentation magnétique qui fonctionnait avec des rails conventionnels, mais son développement n'a pas abouti[20].
Évaluation
Chaque principe de lévitation magnétique pour les voyages en train comporte des avantages et des inconvénients.
| Technologie | Avantages | Inconvénients | ||
| EMS[23],[24] (Sustentation électromagnétique) | Les champs magnétiques à l'intérieur et à l'extérieur du véhicule sont inférieurs à ceux de l'EDS ; technologie éprouvée, disponible dans le commerce ; vitesses élevées (500 km/h); pas besoin de roues ni de système de propulsion secondaire. | La séparation entre le véhicule et la voie de guidage doit être constamment surveillée et corrigée en raison de la nature instable de l'attraction électromagnétique ; l'instabilité inhérente du système et les corrections constantes requises par les systèmes extérieurs peuvent induire des vibrations. | ||
| EDS de type SCMaglev[25],[26] (Sustentation électrodynamique) |
Les aimants embarqués supraconducteurs et la relativement grande distance entre le rail et le train permettent d'atteindre les vitesses les plus élevées jamais enregistrées pour un train (603 km/h) et une capacité de charge importante; le train de type SCMaglev a réussi ses essais en utilisant la supraconductivité à 'haute température' dans ses aimants embarqués refroidis à l'azote à -196 °C, d'un usage plus aisé que les aimants supraconducteurs 'ordinaires' refroidis aux alentours de -270 °C.[réf. nécessaire] | Des champs magnétiques puissants dans le train rendraient le train dangereux pour les passagers équipés de stimulateur cardiaque ou de supports de stockage de données magnétiques tels que des disques durs et des cartes de crédit, ce qui nécessiterait l'utilisation d'un blindage magnétique ; les limitations de l'inductance des voies de guidage limitent la vitesse maximale ; [réf. nécessaire] le véhicule doit avoir des roues pour les déplacements à faible vitesse. | ||
| EDS de type en:Inductrack[27],[28] (Sustentation électrodynamique par aimants permanents à température ambiante disposés en réseau de Halbach) | Sécurité de la suspension: pas de courant nécessaire pour activer les aimants; le champ magnétique est localisé sous la voiture ; peut générer suffisamment de force à basse vitesse (environ 5 km/h pour la lévitation ; en cas de panne de courant, les voitures s'arrêtent en se posant sur leur train atterrissage ; Les aimants permanents en réseau de Halbach sont plus puissants que des électroaimants et génèrent un champ magnétique assez faible à l'intérieur du véhicule comparable à un système à blindage magnétique. | Nécessite soit des roues, soit des segments de voie mobiles lorsque le véhicule est à l'arrêt. En cours de développement (depuis 2008) ; il n'y a pas de version commerciale ni de prototype à l'échelle réelle. Le système de transport Individuel en:Skytran a abandonné la sustentation de type InducTrack au profit d'une sustentation magnétique particulière à asservissement mécanique. | ||
Ni la voie de type en:Inductrack ni la suspension EDS à supraconducteurs ne sont capables de faire léviter les véhicules à l'arrêt, bien que l'Inductrack assure la lévitation à une vitesse beaucoup plus faible; des roues sont nécessaires pour ces systèmes. Les systèmes EMS n'ont pas de roues.
Le Transrapid allemand, le HSST japonais (Linimo), et coréen Rotem. Les trains à sustentation magnétique de type EMS lévitent à l'arrêt, l'électricité étant extraite du rail de guidage à l'aide de rails électriques pour les deux derniers, et sans fil pour le Transrapid. En cas de perte d'énergie sur la voie de guidage pendant le déplacement, le Transrapid est toujours capable de générer de la lévitation jusqu'à une vitesse de 10 km/h, [citation nécessaire] en utilisant l'énergie des batteries de bord. Ce n'est pas le cas des systèmes HSST et Rotem.
Propulsion
Les systèmes EMS tels que HSST/Linimo peuvent fournir à la fois la lévitation et Propulsion en utilisant un moteur linéaire embarqué. Mais les systèmes EDS et certains systèmes EMS tels que Transrapid lévitent mais ne propulsent pas. Ces systèmes ont besoin d'une autre technologie pour la propulsion. Un moteur linéaire (bobines de propulsion) monté dans la voie est une solution. Sur de longues distances, l'équipement de toute la voie avec des bobines a un coût très important.
Stabilité
Le théorème d'Earnshaw montre qu'aucune combinaison d'aimants statiques ne peut être en équilibre stable[29]. Par conséquent, un champ magnétique dynamique (variant dans le temps) est nécessaire pour atteindre la stabilisation. Les systèmes EMS reposent sur un régulateur de tension électronique actif qui mesure en permanence la distance d'appui et ajuste le courant de l'électroaimant en conséquence. Les systèmes EDS s'appuient sur des champs magnétiques changeants pour créer des courants, ce qui peut donner une stabilité passive.
Comme les véhicules à sustentation magnétique volent essentiellement, une stabilisation du tangage, du roulis et du lacet est nécessaire. En plus de la rotation, les sursauts (mouvements vers l'avant et vers l'arrière), les oscillations (mouvements latéraux) ou les soulèvements (mouvements vers le haut et vers le bas) peuvent être problématiques.
Les aimants supraconducteurs d'un train au-dessus d'une voie constituée d'un aimant permanent verrouillent le train dans sa position latérale. Il peut se déplacer linéairement le long de la voie, mais pas hors de la voie. Cela est dû à l'effet Meissner et au pinning du flux.
Système de guidage
Certains systèmes utilisent des systèmes à courant nul (aussi appelés parfois systèmes à flux nul)[21],[30]. Ces systèmes utilisent une bobine qui est enroulée de manière à entrer dans deux champs opposés et alternatifs, de sorte que le flux moyen dans la boucle est nul. Lorsque le véhicule est en position de marche en ligne droite, aucun courant ne circule, mais tout mouvement hors ligne crée un flux qui génère un champ qui le pousse/tire naturellement en ligne.
Tubes sous vide
Certains systèmes (notamment le système Swissmetro) proposent l'utilisation de la technologie des trains a tube sous vide d'air, ce qui supprime la traînée aérodynamique. Cela pourrait permettre d'augmenter considérablement la vitesse et l'efficacité, car la majeure partie de l'énergie des trains à sustentation magnétique classiques est perdue en raison de la traînée aérodynamique[31].
Un risque potentiel pour les passagers des trains circulant dans des tubes sous vide est qu'ils pourraient être exposés au risque de dépressurisation de la cabine, à moins que les systèmes de surveillance de la sécurité du tunnel ne puissent re-pressuriser le tube en cas de dysfonctionnement ou d'accident du train ; cependant, comme les trains sont susceptibles de circuler à la surface de la terre ou à proximité, le rétablissement d'urgence de la pression ambiante devrait être simple. La RAND Corporation a décrit un train à tubes sous vide qui pourrait, en théorie, traverser l'Atlantique ou les États-Unis en 21 minutes environ[32].
Utilisation de l'énergie
L'énergie des trains à sustentation magnétique est utilisée pour accélérer le train. L'énergie peut être récupérée lorsque le train ralentit grâce au freinage régénératif. Elle permet également de faire léviter et de stabiliser le mouvement du train. La majeure partie de l'énergie est nécessaire pour surmonter la traînée aérodynamique. Une partie de l'énergie est utilisée pour la climatisation, le chauffage, l'éclairage et autres.
À basse vitesse, le pourcentage de puissance utilisé pour la lévitation peut être important, consommant jusqu'à 15 % de plus qu'un métro ou un train léger[33]. Pour de courtes distances, l'énergie utilisée pour l'accélération peut être considérable.
La puissance utilisée pour vaincre la traînée de l'air augmente avec le cube de la vitesse et domine donc à grande vitesse. L'énergie nécessaire par unité de distance augmente avec le carré de la vitesse et le temps diminue de façon linéaire. Par exemple, il faut 2,5 fois plus de puissance pour voyager à 400 km/h que pour 300 km/h[34].
Les avions tirent parti de la pression atmosphérique et des températures plus basses en naviguant en altitude pour réduire la consommation d'énergie, mais contrairement aux trains ils doivent transporter du carburant à bord. Cela a conduit à la suggestion d'utiliser des trains à sustentation magnétique dans des tubes sous vide d'air partiel ou des tunnels alimentés avec de l'énergie provenant de sources renouvelables.
Comparaison avec les trains conventionnels
Le transport par train à sustentation magnétique est sans contact et fonctionne à l'électricité. Il repose moins ou pas du tout sur les roues, les roulements et les essieux communs aux systèmes ferroviaires à roues[35].
- Vitesse : le train à sustentation magnétique permet des vitesses de pointe plus élevées que le rail conventionnel, mais certains trains à grande vitesse sur roues ont démontré des vitesses similaires en exploitation normale.
- Entretien : les trains à sustentation magnétique actuellement en service ont montré que l'entretien des voies de guidage était faible. L'entretien des véhicules est également faible (basé sur les heures de fonctionnement, plutôt que sur la vitesse ou la distance parcourue). Le rail traditionnel est soumis à une usure mécanique qui augmente rapidement avec la vitesse, ce qui augmente également la maintenance. Par exemple: l'usure des freins et des caténaires a causé des problèmes pour le Fastech 360 rail Shinkansen. Le train à sustentation magnétique permettrait d'éliminer ces problèmes.
- Météo : le train à sustentation magnétique sont peu affectés par la neige, la glace, le froid intense, la pluie ou les vents violents. Cependant, ils n'ont pas fonctionné dans les conditions aussi variées que les systèmes ferroviaires traditionnels basés sur la friction. Les véhicules à lévitation magnétique accélèrent et décélèrent plus vite que les systèmes mécaniques, indépendamment de l'épaisseur du rail de guidage ou de la pente de la voie, car ce sont des systèmes sans contact[35].
- La voie : les trains Maglev ne sont pas compatibles avec les voies conventionnelles, et nécessitent donc une infrastructure sur mesure pour l'ensemble de leur parcours. En revanche, les trains à grande vitesse conventionnels tels que le TGV peuvent circuler, bien qu'à vitesse réduite, sur l'infrastructure ferroviaire existante, ce qui réduit les dépenses là où de nouvelles infrastructures seraient particulièrement coûteuses (comme les approches finales des terminaux urbains), ou sur des extensions où le trafic ne justifie pas de nouvelles infrastructures. John Harding, ancien responsable scientifique des trains à sustentation magnétique de l' Administration fédérale des chemins de fer US, a affirmé que des infrastructures de train à sustentation magnétique séparées sont plus que rentables avec des niveaux plus élevés de disponibilité opérationnelle par tous les temps et des coûts de maintenance nominaux. Ces affirmations doivent encore être prouvées dans un contexte opérationnel intense et elles ne tiennent pas compte des coûts de construction plus élevés des trains à sustentation magnétique.
- L'efficacité : le rail conventionnel est probablement plus efficace à faible vitesse. Mais en raison de l'absence de contact physique entre la voie et le véhicule, les trains à sustentation magnétique n'ont aucune résistance au roulement, ne laissant que la traînée aérodynamique et la traînée électromagnétique, ce qui peut améliorer l'efficacité énergétique[36]. Certains systèmes, cependant, tels que la Central Japan Railway Company SCMaglev utilisent des pneus en caoutchouc à basse vitesse, ce qui réduit les gains d'efficacité.[citation nécessaire]
- Poids : les électroaimants de nombreux modèles de SGE et de SDE nécessitent entre 1 et 2 kilowatts par tonne[37]. L'utilisation d'aimants supraconducteurs peut réduire la consommation d'énergie des électroaimants. Un véhicule Transrapid Maglev de 50 tonnes peut soulever 20 tonnes supplémentaires, pour un total de 70 tonnes, ce qui consomme 70 -140 kWhp.[citation nécessaire] La plupart de l'énergie utilisée pour le TRI sert à la propulsion et à surmonter la résistance de l'air à des vitesses supérieures à 160 km/h.[citation nécessaire]
- Répartition de masse : une voie 'normale' à grande vitesse nécessite plus de support et de construction à cause de sa charge concentrée sur les roues. Les voitures à sustentation magnétique sont plus légères et leur poids est réparti de manière plus uniforme[38].
- Bruit : comme la principale source de bruit d'un train à sustentation magnétique provient de l'air déplacé plutôt que du contact des roues avec les rails, les trains à sustentation magnétique font moins de bruit qu'un train conventionnel à vitesse équivalente. Cependant, le profil psychoacoustique du train à sustentation magnétique peut réduire cet avantage : une étude a conclu que le bruit du train à sustentation magnétique devrait être évalué comme celui du trafic routier, alors que les trains conventionnels connaissent un « bonus » de 5-10 dB, car ils sont considérés comme moins gênants au même niveau sonore[39],[40],[41].
- Fiabilité des aimants : les aimants supraconducteurs sont généralement utilisés pour générer les puissants champs magnétiques qui font léviter et propulser les trains. Ces aimants doivent être maintenus en dessous de leur température critique (celle-ci varie de 4,2 kelvin à 77 kelvin, selon le matériau). Les nouveaux alliages et les nouvelles techniques de fabrication des supraconducteurs et des systèmes de refroidissement ont permis de résoudre ce problème.
- Systèmes de contrôle : aucun système de signalisation n'est nécessaire pour les trains à grande vitesse, car ces systèmes sont contrôlés par ordinateur. Les opérateurs humains ne peuvent pas réagir assez vite pour gérer ces trains à grande vitesse. Les systèmes à grande vitesse nécessitent des droits de passage spécifiques et sont généralement surélevés. Des tours de communication doivent être en contact permanent avec les trains. Il n'y a pas non plus besoin de sifflets ou de klaxons pour les trains.
- Terrain : les trains à sustentation magnétique sont généralement capables de monter des pentes plus importantes, offrant plus de flexibilité sur le choix de la route et une réduction du nombre de tunnels[38]. Cependant, leur grande vitesse et leur besoin accru de contrôle rendent difficile l'adaptation d'un maglev avec un terrain complexe, comme une colline incurvée. Les trains traditionnels peuvent plus facilement suivre le flanc d'une colline ou serpenter dans une forêt.
Comparaison avec l'avion
Différences entre l'avion et le voyage en train à sustentation magnétique :
- Efficacité : Pour les systèmes à sustentation magnétique, le rapport entre la portance et la traînée peut dépasser celui des avions (par exemple la voie de type en:Inductrack peut approcher un ratio de 200:1 à grande vitesse, meilleur que celui de n'importe quel avion). Cela peut rendre les trains à sustentation magnétique plus efficaces au kilomètre. Cependant, à des vitesses de croisière élevées, la traînée aérodynamique est beaucoup plus importante que la traînée induite par la voie. Les avions à réaction profitent de la faible densité de l'air à haute altitude pour réduire considérablement la traînée aérodynamique. Par conséquent, malgré leur désavantage en termes de rapport entre la portance et la traînée, ils peuvent se déplacer plus efficacement à grande vitesse que les trains maglev qui opèrent au niveau de la mer [citation nécessaire].
- Choix des parcours : les trains à sustentation magnétique offrent des temps de parcours compétitifs pour des distances de 800 km ou moins. En outre, les ascenseurs peuvent facilement desservir des destinations intermédiaires.
- Disponibilité : les trains à sustentation magnétique sont peu affectés par la météo [citation nécessaire].
- Temps total de voyage : les trains à sustentation magnétique ne sont pas soumis aux protocoles de sécurité étendus auxquels sont confrontés les voyageurs aériens, et il n'y a pas de temps de roulage ou de file d'attente pour le décollage et l'atterrissage[citation nécessaire].
Avantages
Par rapport aux chemins de fer traditionnels, les trains à sustentation magnétique sont réputés présenter des avantages[42] :
- Vitesses de pointe et de croisière plus élevées.
- Meilleures accélérations et relances.
- « à vérifier » : Capacité de franchissement de pentes plus fortes, limitant le nombre de tranchées à creuser et d'ouvrages d'art à construire et diminuant donc le coût total de l'infrastructure.
- Risque presque nul de déraillement dans des constructions telles que le Transrapid (du moins tant que la voie est dépourvue d'appareils ou autres zones à risques, ce qui est par ailleurs un lourd handicap du point de vue de l'exploitation). L'accident du Transrapid le qui causa la mort de 23 personnes[43] marqua un coup d'arrêt à ce projet.
Il fut inventé dans l'espoir d'obtenir un meilleur rendement énergétique sur longues distances, en dépit d'un coût prohibitif sur courte distance. Ceci est cependant loin d'être avéré, en particulier si l'on rapporte la consommation totale d'énergie au nombre de passagers transportés.
Inconvénients
- Dans le cas du système à sustentation électrodynamique japonais, la lévitation est obtenue grâce aux bobines supraconductrices installées de chaque côté des bogies du train et à des bobines fixées sur les côtés verticaux de la voie en béton, qui est à température ambiante. La supraconduction utilisée dans les bogies permet d'obtenir la lévitation sans consommation d'énergie. Les aimants supraconducteurs des bogies sont constitués de niobium-titane. Les bobines sont maintenues à environ 4 K (~-269 °C) par un circuit d'azote liquide et d'hélium liquide afin d'obtenir la supraconductivité[44].
Ces lignes présentent des inconvénients comparées aux lignes de train traditionnel à grande vitesse (TGV):
- Incompatibilité avec les réseaux traditionnels : un train à sustentation magnétique nécessite un réseau de voies particulier et ne peut emprunter des tronçons conventionnels déjà existants.
- Système peu adapté au fret lourd (limité à 20 tonnes pour un train de 50 tonnes).
- Système sensible au vent, nécessitant des pentes peu marquées et des rayons de courbe très larges.
- Acceptabilité du champ électro-magnétique par les riverains de la ligne[45].
Cependant en l'absence de systèmes importants en exploitation, on manque de recul pour apprécier les avantages et inconvénients réels par rapport au chemin de fer classique, notamment sur le plan économique.
Notes et références
- General Atomics: Maglev technology
- Le Monde, 28 mars 2008
- « L'Allemagne enterre son train à sustentation magnétique », sur lexpress.fr, 27 mars 2008, consulté le 13 août 2013.
- (en) « Siemens, ThyssenKrupp to Dissolve Maglev Train Company », DW, (lire en ligne)
- (de) , « Transrapid - Industrie sieht keine Chance mehr », 4 juillet 2008
- Adrien Bonetto, « Innovation : Paris-Moscou en une heure, c'est (bientôt) possible ! » », sur Lepoint.fr, (consulté le ).
- http://www.monorails.org/tmspages/MagDaejeon.html
- (en) « Incheon Airport Maglev OPENS », sur Kojects, (consulté le ).
- (en) Keith Barrow, « Changsha airport maglev line opens », .
- Claude Fouquet, « Un train à lévitation japonais atteint la vitesse record de 590 km/h », Les Échos, (consulté le ).
- « Japon : un train atteint la vitesse record de 603 km/h », Le Monde, .
- (ja) « 高速鉄道の海外事業展開について » [« À propos du développement commercial à l'étranger du chemin de fer à grande vitesse »], compagnie ferroviaire JR Central (Japan Railway Central), ; texte repris par ADIT Japon
- U.S.-Japan High-Speed Rail (USJHSR) et U.S.-Japan MAGLEV (USJMAGLEV) cofondées en 2009 avec une société de capital risque et de conseil, New Magellan Ventures. Source ADIT
- Site officiel du Swissmetro, in swissmetro.ch, 2012
- (en) « High-Tech for 'Flying on the Ground' », Transrapid International, (lire en ligne [PDF], consulté le )
- (en) « Hong Kong Physics World - Maglev », Hong Kong Physics World (consulté le )
- Magnemotion M3 Maglev system
- (en) Tsuchiya, M. Ohsaki, H., « Characteristics of electromagnetic force of EMS-type maglev vehicle using bulk superconductors », IEEE Transactions on Magnetics, vol. 36, no 5, , p. 3683-3685 (DOI 10.1109/20.908940, Bibcode 2000ITM....36.3683T)
- (en) R. Goodall, « The theory of electromagnetic levitation », Physics in Technology, vol. 16, no 5, , p. 207-213 (DOI 10.1088/0305-4624/16/5/I02)
- "Maglev: How they're Getting Trains off the Ground", Popular Science, December 1973 p. 135.
- (en) « Principle of Maglev », Railway Technical Research Institute (consulté le )
- (en) J.L. He, D.M. Rote et H.T. Coffey, « Study of Japanese Electrodynamic-Suspension Maglev Systems », Osti.gov, (DOI 10.2172/10150166, lire en ligne, consulté le )
- (en) Nelson Ireson, « Dutch university working on affordable electromagnetic suspension » [archive du ], MotorAuthority.com, (consulté le )
- (en) Keisuke Ogawa, « Hitachi Exhibits Electromagnetic Suspension System », techon.nikkeibp.co.jp,
- (en) Marc T. Thompson et Richard D. Thornton, « Flux-Canceling Electrodynamic Maglev Suspension : Part II Test Results and Scaling Laws », IEEE Transactions on Magnetics, vol. 35, no 3, (DOI 10. 1109/20.764894, lire en ligne)
- (en) Valarie Cotsalas, « It Floats! It Speeds! It's a Train! », The New York Times, (lire en ligne)
- (en) « A New Approach for Magnetically Levitating Trains – and Rockets », llnl.gov (consulté le )
- (en) Richard F. Post, « MagLev: A New Approach » [archive du ], sur Scientific American,
- (en) Gibbs, Philip et Geim, Andre, « Is Magnetic Levitation Possible ? » [archive du ], High Field Magnet Laboratory (consulté le )
- (en) « How maglev works: Learning to levitate », Maglev 2000 (consulté le )
- (en) « Trans-Atlantic MagLev » (consulté le )
- (en) « The Very High Speed Transit System », RAND, (consulté le )
- (en) « Beijing Maglev », Maglev.net (consulté le )
- « Can magnetically levitating trains run at 3 000 km/h? »
- (en) « -Maglev Technology Explained », North American Maglev Transport Institute, (lire en ligne[archive du ])
- (en) « Transrapid claims to use a quarter less power at 200 km/h than the InterCityExpress » [archive du ], Transrapid (consulté le )
- « Tagungsband.doc » [archive du ] (consulté le )
- (en) Alan Kandel, « Conventional High-Speed Rail Vs. Magnetically Levitated Trains: Was Maglev Ever In Contention? »,
- (en) Vos, Joos, « Annoyance caused by the sounds of a magnetic levitation train », The Journal of the Acoustical Society of America, vol. 115, no 4, , p. 1597-1608 (PMID 15101639, DOI 10. 1121/1.1650330, Bibcode 2004ASAJ..115. 1597V, lire en ligne, consulté le )
- (en) Gharabegian, Areq, « Maglev-A super fast train », The Journal of the Acoustical Society of America, vol. 108, no 5, , p. 2527 (DOI 10. 1121/1.4743350, Bibcode 2000ASAJ..108R2527G, lire en ligne, consulté le )
- (en) « Maglevs in Action », North American Maglev Transport Institute, (lire en ligne[archive du ])
- Que peuvent apporter les trains magnétiques dans le domaine ferroviaire ?, in trainsmagnetiques.netlib.re, 2012.
- (en-GB) « Deadly crash on German monorail », BBC, (lire en ligne, consulté le )
- MAGLEV Le train volant, in supraconductivite.fr
- « Pékin suspend l'extension du train à grande vitesse Maglev pour des « raisons sanitaires » », LeMonde.fr, 28 mai 2007.
Voir aussi
Articles connexes
- Transrapid de Shanghai : premier service de train à sustentation magnétique commercial au monde.
- SCMaglev
- Aérotrain français circulant sur un rail de béton sur coussin d'air.
- Liste des monorails dans le monde
- déplacement à grande vitesse
- Dépendance au sentier
- Hyperloop
- TransPod
Liens externes
 Portail du chemin de fer
Portail du chemin de fer  Portail de la grande vitesse ferroviaire
Portail de la grande vitesse ferroviaire  Portail de l’énergie
Portail de l’énergie