Théorème des fonctions implicites
En mathématiques, le théorème des fonctions implicites est un résultat de géométrie différentielle. Certaines courbes sont définies par une équation cartésienne, c'est-à-dire une équation de la forme f(x, y) = 0, où x et y décrivent les nombres réels. Le théorème indique que si la fonction f est suffisamment régulière au voisinage d'un point de la courbe, il existe une fonction φ de ℝ dans ℝ et au moins aussi régulière que telle que localement, la courbe et le graphe de la fonction φ sont confondus. Plus précisément, si (x0, y0) vérifie l'équation, si f est continûment différentiable et que sa dérivée partielle par rapport à y en (x0, y0) n'est pas nulle, alors il existe un voisinage de (x0, y0) sur lequel la zone s'identifie au graphe de φ.

Ce théorème admet une variante plus générale, qui s'applique non plus au plan, mais à des espaces de Banach, c'est-à-dire des espaces vectoriels complets. Ce résultat est une forme équivalente du théorème d'inversion locale qui indique qu'une fonction différentiable et suffisamment régulière est localement inversible, c'est une conséquence directe d'un théorème du point fixe.
Ce théorème se trouve dans différentes branches des mathématiques, sous cette forme ou sous celle de l'inversion locale. Il permet de démontrer le mécanisme des multiplicateurs de Lagrange, il intervient dans un contexte plus géométrique, pour l'étude des variétés différentielles, on le trouve encore pour l'étude des équations différentielles où il est, entre autres, utilisé à travers le théorème du redressement d'un flot, permettant de démontrer le théorème de Poincaré-Bendixson. Il dépasse le cadre des mathématiques, les physiciens ou les économistes en font usage, lorsque certaines variables ne peuvent être définies à l'aide d'une fonction, mais uniquement implicitement à l'aide d'une équation.
Dimension 2
Avant d'énoncer le théorème sous sa forme générale, prenons l'exemple de la dimension 2 :
Soit f une fonction de classe Cp (avec p > 0) définie sur un ouvert U de ℝ2 et à valeurs dans ℝ. Soit (x0, y0) un point de U tel que f(x0, y0) = 0 et tel que la dérivée partielle de f par rapport à la deuxième variable ne soit pas nulle en (x0, y0). Il existe une fonction réelle φ de classe Cp, définie sur un intervalle ouvert réel V contenant x0, et un voisinage ouvert Ω de (x0, y0) dans U tels que, pour tout (x, y) ∈ ℝ2 :
.

La condition φ(x0) = y0 n'est pas explicitée car elle n'est qu'un cas particulier de l'équivalence. La dérivée de φ au point x0 est donnée par la formule :

Premier exemple
Il existe de multiples manières de définir une figure géométrique dans le plan. Ainsi, l'ensemble des points à distance 1 d'une origine O, définit un cercle. Cette même figure, d'après le théorème de Pythagore, se définit aussi par une équation cartésienne : x2 + y2 – 1 = 0. On peut encore la définir à l'aide d'une équation paramétrique, le cercle correspond à l'image du segment [0, 2π] par la fonction qui à θ, associe (cos θ, sin θ).
Le théorème des fonctions implicites permet, à l'aide d'une équation cartésienne, d'obtenir une équation paramétrique, mais pas de la même nature que celle citée en exemple. Il fournit bien des représentations sous forme d'une équation paramétrique, mais la courbe correspond à l'image d'une fonction qui à x associe (x, φ(x)). Plus simplement, on peut considérer que la courbe est localement le graphe de la fonction φ, ainsi cette forme particulière d'équation paramétrique est définie par une fonction de R dans R et non de R dans le plan.
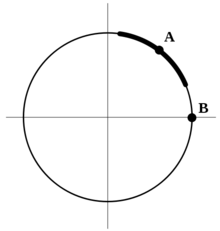
Dans le cas du cercle, une première difficulté apparaît, pour un point x compris strictement entre –1 et 1, il existe deux valeurs de y possibles. Le théorème est uniquement local, c'est-à-dire qu'il permet de fournir une partie seulement de la figure géométrique et ne peut, dans le cas général, la décrire tout entière.
En revanche, pour un point A de la figure, le théorème permet théoriquement de fournir une équation paramétrique d'un voisinage du point A, ce qui signifie, si (x0, y0) sont les coordonnées du point A, qu'il existe un intervalle ouvert ]a, b[ contenant x0 sur lequel est décrit la figure. Ce résultat ne peut pas être toujours vrai, le point B, dont l'abscisse est égale à 1, est un contre exemple. À l'exception du point B et pour toute abscisse suffisamment proche de 1, correspond deux ordonnées possibles. Le théorème ne peut s'appliquer en ce point.
Une remarque permet de détecter une propriété de ce point B. Si un point décrivant le cercle varie autour de B, sa deuxième coordonnée reste presque immobile. Une manière de le percevoir rigoureusement est de considérer l'équation cartésienne comme une fonction de la variable y ayant x comme paramètre. Si l'on dérive cette fonction, on obtient l'expression 2.y. Cette dérivée est appelée dérivée partielle, par rapport à la deuxième variable. Au point B, l'ordonnée est nulle et la dérivée partielle est aussi nulle. Le théorème indique que si cette dérivée partielle n'est pas nulle pour les coordonnées d'un point A, il est toujours possible de représenter le voisinage de A comme le graphe d'une fonction. Dans l'exemple choisi, la fonction est[1] :

Courbe algébrique
.jpg.webp)
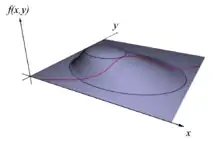
Si l'exemple précédent montre la mécanique et la portée du théorème des fonctions implicites, il n'en illustre guère son intérêt. Il est inutile de faire appel à ce puissant théorème pour trouver les deux fonctions dont l'union des graphes forment un cercle. L'exemple suivant est plus révélateur d'un usage possible. Il correspond à l'étude de la figure vérifiant l'équation cartésienne[2] :

.jpg.webp)
Une manière de visualiser cette figure, est de considérer la nappe qui au point du plan de coordonnées (x, y) associe le terme de gauche de l'équation. Cette nappe est illustrée à gauche, la partie ayant une coordonnée verticale supérieure à 0 est en jaune ou vert et l'autre partie en bleu ou rouge. La courbe définie par l'équation est celle obtenue si la nappe est coupée au plan z = 0, qui correspond à la frontière entre les zones jaune et bleu. Pour une meilleure visibilité, il est possible de se placer verticalement au-dessus de la nappe et d'y ajouter un repère, ce qui est fait sur la figure de droite. Tenter une résolution directe est hasardeux ; le théorème des fonctions implicites facilite l'étude.
Commençons par quelques remarques géométriques simples sur la zone des abscisses positives. Si x est strictement plus grand que 10, l'expression x(x2 + y2) est strictement plus grande que 10(x2 - y2), la courbe recherchée ne possède aucun point d'abscisse strictement supérieure à 10 et le point de plus grande abscisse est unique et de coordonnées (10, 0). Le théorème des fonctions implicites indique que pour les abscisses situées dans l'intervalle ]0, 10[, il existe un paramétrage si l'expression suivante, notée d(x), n'est pas nulle :

L'expression d(x) ne s'annule sur la zone étudiée, que pour les ordonnées nulles (seule la zone des abscisses positives est étudiée ici) et ceux sur la droite x + 10.y = 0, qui ne rencontre pas la courbe pour les abscisses strictement positives. Pour les autres points (x0, y0), on obtient une expression de la dérivée du paramétrage φ au point x0.

Selon la zone où se trouve le point étudié, on sait si la fonction de paramétrage est croissante ou décroissante. À l'intérieur d'une ellipse, illustrée en vert sur la figure de droite, le paramétrage est croissant. Sur l'ellipse, le paramétrage possède une dérivée nulle, elle possède le point de coordonnées (6, 3) en commun avec la courbe recherchée. Et à l'extérieur, dans la zone rouge, le paramétrage est strictement décroissant[3].
Énoncé
Il est utile d'étendre ce résultat sur des surfaces et non plus sur des courbes, voire sur des espaces vectoriels dont la dimension n'est pas nécessairement finie. On trouve cette version plus générale[4],[5] :
Théorème des fonctions implicites — Soient E, F et G trois espaces de Banach et f une fonction de classe Cp définie sur un ouvert U de E × F et à valeurs dans G. Soit (x0, y0) un point de U tel que f(x0, y0) = 0 et tel que la différentielle partielle D2f(x0, y0) soit inversible[Note 1]. Il existe une fonction φ de classe Cp à valeurs dans F, définie sur un voisinage ouvert V de x0, et un voisinage ouvert Ω de (x0, y0) dans U tels que, pour tout (x, y) ∈ E×F :
- Remarques
- L'existence d'un tel ouvert Ω signifie que le graphe de φ est un ouvert de l'ensemble des zéros de f, ce qui garantit automatiquement l'unicité de φ, au sens suivant[6] :Sur toute partie connexe C de V contenant x0, φ est la seule application continue vérifiant

Dimension supérieure
Multiplicateur de Lagrange
Le théorème des fonctions implicites peut aussi être vu comme un outil pour démontrer des résultats, à l'image de la méthode du multiplicateur de Lagrange. On se place ici dans Rn ; on cherche les optimums d'une fonction f d'un ouvert U de Rn dans R, vérifiant une contrainte g(x) = 0. On suppose ici que f et g sont continument différentiables. Pour plus de simplicité, on suppose que la contrainte définit une surface de dimension n – 1, c'est-à-dire que g est une fonction dont la différentielle est injective en chaque point et que g est à valeurs dans R[10],[Note 2].
Le théorème associé au multiplicateur de Lagrange indique que les gradients de f et de g sont colinéaires sur les extrema recherchées. Le théorème des fonctions implicites permet simplement de montrer ce résultat dans le cadre des hypothèses restrictives choisies ici[Note 2]. Soit a un tel extremum, on note gradg(a) le gradient de g au point a. Si V désigne un voisinage de a inclus dans U, on peut écrire tout vecteur de V sous la forme a + h + λgradg(a), ou h est un vecteur orthogonal au gradient et λ une valeur scalaire. La contrainte g(x) = 0 s'exprime sur V par l'équation φ(h, λ) = g(a + h + λgradg(a)) = 0. Un rapide calcul montre que la différentielle partielle sur λ est égale au carré de la norme du gradient, qui par hypothèse n'est pas nul. Le théorème des fonctions implicites permet de considérer localement la contrainte comme respectée par les points images par une fonction ψ d'un ouvert de Rn–1 dans R. Plus précisément, il existe un voisinage W du vecteur nul de l'hyperplan orthogonal au gradient de g tel que les points de la contraintes s'écrivent de manière unique sous la forme a + h + ψ(h).gradg(a), avec h élément de W. Dire que a est un extremum signifie que la fonction f1 qui à h associe f(a + h + ψ(h).gradg(a)) admet une différentielle nulle en 0. On obtient :

Les seuls vecteurs orthogonaux à l'orthogonal d'un vecteur non nul sont les vecteurs colinéaires, ce qui montre la propriété.
Variété différentielle
Une variété différentielle de dimension d de Rn où n et d sont des entiers strictement positifs tel que d est plus petit que n, permet de généraliser les notions de courbes ou de surfaces lisses et régulières de dimension 2. Les termes de lisse et régulier sont des métaphores pour désigner le fait que les êtres considérés n'ont pas d'arête ou de point double. L'objet de ce paragraphe concerne les figures à l'image d'une sphère, qui est une variété différentielle de dimension 2, mais pas d'un cube, qui contient des points singuliers[Note 3].
Le voisinage d'un point O d'une variété de dimension d possède la propriété d'être semblable, au sens du difféomorphisme, à un ouvert de Rd. On peut l'exprimer de la manière suivante : il existe un ouvert U de Rd et un homéomorphisme φ1, continument différentiable de U dans un ouvert de la variété contenant le point O et la différentielle en un point quelconque est de rang d. Autrement dit, il existe un bon paramétrage du voisinage de O. Il est aussi possible d'exprimer cette propriété à l'aide d'une équation cartésienne. Il existe un ouvert V de Rn et une fonction ψ de V dans Rn-d continument différentiable et dont les différentielles sont surjectives, tel que l'intersection de la variété avec V soit l'ensemble des points x qui vérifie l'équation ψ1(x) = 0, ce qui donne une définition locale à l'aide d'une équation cartésienne[11]
Cette situation est la copie d'une configuration classique en algèbre linéaire. Un sous-espace vectoriel de dimension d d'un espace de dimension n peut être vu, soit comme l'image d'une application linéaire injective d'un espace de dimension d, soit comme le noyau d'une application surjective dans un espace de dimension n - d. En algèbre linéaire, ces deux points de vue sont équivalents[12]. Il en est de même avec les variétés différentielles. L'équivalence se démontre dans un sens avec le théorème des fonctions implicites, la réciproque est plus aisée avec le théorème d'inversion locale.
Supposons que l'on dispose d'une équation paramétrique ψ1(x) = 0 sur le voisinage U. La différentielle de ψ1 en x0, coordonnées du point O, est de rang d et possède un noyau K de dimension n - d et un supplémentaire H de ce noyau de dimension d, d'après le théorème du rang. Tout élément de U s'écrit de manière unique comme égal à une somme x0 + h + k et l'on peut choisir un ouvert UH de H contenant le vecteur nul et un ouvert UK de H contenant le vecteur nul tel que x0 + UH + UK soit contenu dans U. L'application ψ de UH×UK dans Rd, qui à (h, k) associe ψ1(x0 + h + k) satisfait aux hypothèses du théorème des fonctions implicites, d'où l'existence d'un paramétrage locale du voisinage de O, construit sur le voisinage UH.
.jpg.webp)
On suppose maintenant que l'on dispose d'une représentation paramétrique locale du voisinage de O, c'est-à-dire une application φ1 de Rd dans Rn dont l'image est un voisinage de O dans la variété. Cette situation est illustrée sur la figure de droite. La droite bleue représente Rd, la portion de courbe la variété contenant le point O est représentée en rouge. On identifie Rd avec le sous-espace vectoriel de Rn dont les n - d dernières coordonnées sont nulles. L'image de la différentielle de φ1 au point x0 est un sous-espace vectoriel de dimension d, on considère Ha un supplémentaire de ce sous-espace vectoriel. On appelle Hd le sous-espace de Rn ayant les d premières coordonnées nulles. Les sous-espaces Ha et Hd ayant même dimensions, ils sont isomorphes ; soit φ2 un tel isomorphisme. On considère maintenant φ l'application de U×Hd dans Rn, qui à x0 + h + k associe φ1(x0 + h) + φ2(k). Ici h désigne un vecteur de Rd et k un vecteur de Ha. L'application φ est continument différentiable et sa différentielle au point x0 est un isomorphisme. Le théorème d'inversion locale montre qu'il existe un ouvert W contenant O et une application ψ1 de W dans Rn différentiable et qui soit localement une réciproque de φ. L'image de l'intersection de la variété et de W est incluse dans Hd, si l'ouvert W est choisi suffisamment petit. Il suffit, pour conclure, de composer ψ1 par l'application linéaire qui, à un vecteur de Rn, associe le vecteur de Rn–d constitué des n - d dernières coordonnées du vecteur d'origine. Si ψ est cette application composée, sur un voisinage de O, la variété est définie par l'équation ψ(x) = 0.
Théorème du redressement d'un flot

Le théorème des fonctions implicites joue un rôle pour l'étude des équations différentielles. On le trouve à divers endroits, dont le théorème du redressement d'un flot[13]. Considérons l'équation différentielle autonome (1) :

Ici f désigne une fonction continument différentiable définie sur U, un ouvert d'un espace de Banach E et à valeurs dans E. Le théorème de Cauchy-Lipschitz montre l'existence d'une unique fonction flot φ qui prend ses valeurs dans un ouvert V inclus dans R×U et à valeurs dans E, telle que la fonction qui à t associe φ(t, x) soit l'unique solution de l'équation (1) avec la condition de Cauchy s(0) = x.
Un exemple de flot, au voisinage V1 d'un point x0 de U est illustré en rouge à droite. Si l'on considère l'intersection de V1 avec un hyperplan affine contenant x0 et dont la direction ne contient pas f(x0), on obtient la « pastille » illustrée en rouge et jaune. Pour l'étude locale d'un flot, la configuration équivalente au-dessous, en bleu est plus simple. Si la fonction f est constante, sur un voisinage de la pastille V, pour un point x de V, les solutions de l'équation différentielle (1) sont décrites par le flot φ(t, x) = x + tv où v est le vecteur constant image de f, sur un voisinage de V.
Une conséquence du théorème du redressement est l'existence d'un difféomorphisme ψ défini sur un voisinage W de x tel que :

Autrement dit, il est possible de « redresser » le flot φ à l'aide d'un difféomorphisme ψ, ce qui permet une étude locale plus aisée de l'équation différentielle (1). La démonstration de ce résultat est fondée sur le fait que la fonction flot est aussi continument différentiable. La restriction de φ à W×]–μ, μ[ possède au point (0, x0) une différentielle inversible[Note 1]. Le théorème d'inversion locale permet de conclure. Ce résultat est utilisé, par exemple dans la démonstration du théorème de Poincaré-Bendixson[14].
Théorème de Cauchy-Lipschitz
Le théorème précédent est une application directe du théorème d'inversion locale, à la condition de disposer d'un résultat non immédiat. Si la fonction f du paragraphe précédent est de classe C1, alors le flot l'est aussi. Ce résultat porte généralement le nom de théorème de Cauchy-Lipschitz. Cette forme sophistiquée du théorème est traitée dans l'article détaillé. De manière indépendante, deux mathématiciens Pugh et Robbin[15] ont trouvé une même démonstration élémentaire. Elle consiste à étudier l'application T qui à un couple (x, σ) associe une fonction. Ici x est un élément de U avec les notations du paragraphe précédent et σ une fonction d'un petit intervalle contenant O. L'application est définie de la manière suivante :

La solution intégrale s, qui à t associe φ(t, x) vérifie l'égalité T(x, s) = 0. Il est relativement simple de montrer que T satisfait les hypothèses du théorème des fonctions implicites, ce qui montre que la fonction qui à x associe la courbe intégrale φ(t, x) est de classe C1. À partir de là, il est simple d'en déduire le caractère C1[Note 4].
Cette démonstration montre la pertinence du deuxième énoncé, très général, du théorème des fonctions implicites proposé dans cet article. En analyse fonctionnelle et à l'image du résultat de ce paragraphe, il est utile de pouvoir choisir les variables dans un Banach.
Théorème des fonctions implicites holomorphes
Si on s'intéresse aux fonctions holomorphes à une ou plusieurs variables, on dispose d'une variante du théorème des fonctions implicites appelée théorème des fonctions implicites holomorphes[16].
Soient pour des fonctions holomorphes au voisinage d'un point telles que pour tout . Supposons que
Alors les équations
admettent une solution holomorphe au voisinage de telle que .









Notes et références
Notes
- Une application linéaire continue T : E → F entre deux espaces vectoriels normés est dite inversible lorsqu'elle est bijective et que sa réciproque T−1 : F → E (linéaire) est continue. Entre espaces de dimension finie, toute application linéaire est continue. Entre espaces de Banach, d'après le théorème de Banach-Schauder, la réciproque d'une bijection linéaire continue est toujours continue. François Laudenbach, Calcul différentiel et intégral, éd. École Polytechnique, , 214 p. (ISBN 978-2-7302-0724-9, lire en ligne), p. 49.
- Le cas général est traité dans l'article détaillé.
- Pour une définition précise, voir l'article détaillé.
- Voir l'article détaillé.
Références
- Cet exemple est traité dans E. W. Swokowski, Analyse, De Boeck, 1993, 5e éd. (ISBN 978-280411594-4), p. 147, aperçu sur Google Livres.
- Il provient de : Cours de deuxième année deug mass - Les fonctions implicites par F. Dupont, de l'université de Brest.
- Le choix de ce type d'exemple pour illustrer l'intérêt du théorème est fréquent. On trouve un exemple similaire dans p. 54 de F. Ronga, « Dérivabilité, théorème des fonctions implicites et applications », sur Université de Genève.
- Pour une démonstration, voir par exemple .
- Robert Roussarie et Jean Roux, Des équations différentielles aux systèmes dynamiques, vol. I, EDP Sciences, (lire en ligne), p. 15, dans le cas d'espaces de dimension finie.
- Pour une démonstration, voir par exemple cet .
- Serge Lang, Analyse Réelle, Paris, InterÉditions, , 230 p. (ISBN 978-2-7296-0059-4), p. 122.
- Laudenbach 2000, p. 65.
- Dany-Jack Mercier, Fonctions de plusieurs variables réelles : exercices et problèmes corrigés, Publibook, (lire en ligne), p. 324, dans le cas d'espaces de dimension finie.
- Ce sont les restrictions choisies dans l'article, servant de référence au traitement de cet exemple : D. Hoareau Cauchy-Schwarz par le calcul différentiel, sur MégaMaths (2003).
- Marcel Berger et Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions], 2.1.
- Ronga, p. 78.
- D. Leborgne, Calcul différentiel et géométrie, PUF, 1982, p. 234.
- C'est pour cette raison que ce résultat est présenté, par exemple dans Claude Viterbo, « Conjugaison, redressement et premier retour », sur École Polytechnique, .
- Lang 1977, p. 129.
- Henri Cartan, Théorie élémentaire des fonctions analytiques d'une ou plusieurs variables complexes, Hermann, , p. 138
Voir aussi
Articles connexes
Lien externe
V. F. Bayart Théorème des fonctions implicites sur le site bibmath.net
Bibliographie
(en) Michael Spivak, (A Comprehensive Introduction to) Differential Geometry [détail des éditions]
 Portail de l'analyse
Portail de l'analyse