Mécanique du contact
En génie mécanique, la mécanique du contact décrit le comportement de structures en contact ou vouées à entrer en contact. Elle comprend la modélisation (sous forme d'équations, d'inéquations, d'inclusions, de projections) du comportement de ces structures mécaniques et le développement d'algorithmes capables de générer une approximation numérique dont les propriétés sont contrôlées (convergence, stabilité).
La mécanique du contact est un sujet relativement ardu. La difficulté principale provient des conditions dites de non-pénétration qui interdisent aux structures en contact d'occuper, au moins en partie, le même domaine spatial ainsi que des conditions de frottement. Ces conditions posent des difficultés théoriques et numériques.
Contact unilatéral en statique
Dans cette section, le frottement est ignoré, ainsi que le temps. Seules les conditions de contact unilatéral sont évoquées.
Système à un degré de liberté
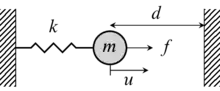
Dans cette section, afin d'établir un cadre (très) simplifié de la mécanique du contact, un seul degré de liberté est supposé, comme indiqué sur la figure 1 : le système idéalisé implique donc le déplacement de la masse . Cette masse est initialement, c'est-à-dire quand le système est au repos (force extérieure ignorée ), séparée d'un mur rigide d'une distance appelée jeu. Sous l'effet d'un force extérieure , la masse est amenée à se déplacer. La raideur , évidemment quantité strictement positive (on observe immédiatement, sur la figure 2, qu'une raideur négative élimine soit l'unicité de la solution, soit son existence), aura tendance à la retenir. Sous cette hypothèse, plusieurs formulations équivalentes sont disponibles. L'exemple considéré est particulièrement simple. Il ne s'agit aucunement d'être exhaustif mais de se concentrer sur la bonne formulation des conditions de contact. Le cadre général, comprenant notamment des cinématiques plus riches, implique rapidement l'usage de notations lourdes qui n'aident pas à la compréhension des concepts.





Loi de contact unilatéral
La loi de contact unilatéral d'un solide sur un obstacle rigide fut proposée par Signorini et s'écrit

où est la force de contact. Elle décrit deux configurations:

- contact inactif (ou jeu ouvert): et ;
- contact actif (ou jeu fermé): et .




Ces trois conditions, écrites sous la forme de deux inéquations et d'une égalité, sont dites conditions de complémentarité. C'est leur aspect combinatoire qui rend la mécanique de contact difficile.
Équations du mouvement

Les équations qui gouvernent le statut du système combinent l'équation de la statique (principe de Newton) à la loi de Signorini. Elles s’énoncent comme suit:

La première équation décrit l'équilibre statique du système, à savoir que la somme des forces extérieures (la force de rappel initiée par la raideur, la force extérieure et la force de contact) agissant sur la masse est nulle. La deuxième ligne résume les conditions de Signorini. Elles expriment le fait que la masse ne peut pas pénétrer le mur rigide sous l'action des forces extérieures comme expliqué ci-dessus.
Dans l'exemple considéré ci-dessus, les équations sont très simples à résoudre. Il y a deux inconnues, à savoir et , et deux ensembles décrits par les deux lignes précédentes: ces deux ensembles s'intersectent nécessairement en un unique point. Une fois des valeurs numériques assignées aux quantités mécaniques en jeu, il suffit de discuter deux situations:
- contact inactif (ou jeu ouvert): , soit et ;
- contact actif (ou jeu fermé): et .


Comme mentionné précédemment, l'aspect combinatoire est tel que toutes les configurations possibles doivent être testées avant de trouver la solution. C'est rapide pour un système à un seul degré de liberté mais beaucoup plus gourmand pour les grands systèmes.
Minimisation de l'énergie potentielle
Les équations précédentes peuvent être réécrites par minimisation d'énergie sous contrainte unilatérale. On fait appel aux outils de l'optimisation. Pour cette configuration hautement simplifiée, il s'agit d'écrire formellement:

Le théorème de Karush Kuhn & Tucker permet de retrouver les équations précédentes sans difficulté.
Inéquation variationnelle
Les inéquations variationnelles sont moins connues des ingénieurs en général. La mise en place des équations demandent un ingrédient particulier, à savoir l'espace des déplacements admissibles, c'est-à-dire qui ne violent pas la condition de non-pénétration, soit . La formulation nécessite un déplacement virtuel admissible (aussi appelé fonction test par les mathématiciens), appartenant à l'ensemble . Elle s'écrit:


Trouver le déplacement tel que .









Les outils provenant de l'analyse convexe forment la base de cette approche parce que l'ensemble est convexe: c'est aussi un sous-ensemble de l'espace des déplacements n'ayant pas à satisfaire les contraintes de contact. Sans entrer dans les détails, on remarque que la force de contact n'apparaît pas explicitement dans la formulation. C'est un de ses avantages parce qu'aucune hypothèse sur n'est stipulée. Cet avantage n'est pas évident pour la configuration en cours, mais l'est dans des cadres mathématiques plus avancés.
Cette formulation est aussi dite formulation en déplacement ou formulation primale parce que l'effort de contact n'apparaît pas explicitement.
Formulation par projection



Les équations de Newton évoquées précédemment, associant égalités et inégalités, peuvent être réécrites sous forme d'égalités uniquement, grâce à l'opérateur de projection. Dans la configuration présente, cet opérateur de projection, est équivalent à la fonction

L'écriture de l'équilibre statique reste inchangée mais les trois conditions de Signorini sont transformées de telle sorte que l'ensemble devient (il s'agit d'un exemple parmi d'autres puisque la transformation des trois conditions de Signorini en égalité n'est pas unique):

où est une constante arbitraire strictement positive.







Cette formulation est intéressante dans le sens où il est possible d'utiliser un solveur de Newton non lisse pour résoudre le système d'équations. Il faut cependant faire attention puisque la faible régularité de la fonction peut poser problème.

Inclusion
Les développements précédents peuvent aussi s'exprimer sous forme d'inclusion. Pour cela, il faut réécrire la fonction multivoque définie par les conditions de Signorini, soit:

Il s'agit bien de l'ensemble illustré sur les figures 2 et 3. La formulation devient alors:

ou, dit autrement . La nécessité d'utiliser une inclusion et non pas une égalité provient du fait que l'ensemble n'est pas mono-valué pour tous les et en particulier pour . Cela ne signifie en aucun cas que la solution au problème n'est pas unique, comme certains lecteurs peu habitués à ce formalisme, pourraient le penser.


Frottement en statique
Contact unilatéral en dynamique
Système à un degré de liberté
L'exemple classique de la balle rebondissante est utilisé. Il s'agit bien d'un système à un degré de liberté semblable à l'exemple en statique mais la raideur a été éliminée afin de simplifier les développements.
Équations du mouvement
Dans un premier temps, on peut être tenté d'ajouter seulement le terme d'inertie dans les équations de la statique pour aboutir à:

Cependant, il est relativement simple d'exhiber plusieurs solutions physiquement acceptables. Le problème est donc mal posé parce qu'il n'y a pas unicité de la solution. Il faut en fait ajouter une loi qui permet de recouvrer l'unicité. Ceci est classiquement réalisé grâce à une loi d'impact qui lie les vitesses de la balle avant et après l'impact, lorsque le jeu est fermé, soit .
Bibliographie
- Vincent Acary (2001), Contribution à la modélisation mécanique et numérique des édifices maçonnés, thèse de doctorat
- Pierre Alart (1997), Méthode de Newton généralisée en mécanique du contact. Journal de mathématiques pures et appliquées, vol 76, p. 83-108
- Houari Boumediène Khenous (2005), Problèmes de contact unilatéral avec frottement de Coulomb en élastostatique et élastodynamique. Étude mathématique et résolution numérique, thèse de doctorat
Notes et références
 Portail de la physique
Portail de la physique