Interface neuronale directe
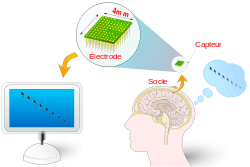
Une interface neuronale directe - abrégée IND ou BCI[1] ou encore ICM (interface cerveau-machine, ou encore interface cerveau-ordinateur) est une interface de communication directe entre un cerveau et un dispositif externe (un ordinateur, un système électronique…). Ces systèmes peuvent être conçus dans le but d'étudier du cerveau, d'assister, améliorer ou réparer des fonctions humaines de cognition ou d'action défaillantes.
L'IND peut être unidirectionnelle ou bidirectionnelle.
Ce type de périphérique est fondamentalement différent de toute autre interface homme-machine : une telle liaison ne requiert en effet aucune transformation préalable du signal électrique émis par l’activité cérébrale en activité musculaire (psychomotrice), cette dernière étant usuellement traduite en signal d’entrée pour la machine.
En s’affranchissant de la chaîne de réaction « cerveau, nerfs, muscles, interface conventionnelle homme-machine », les temps de réponse peuvent être écourtés de plusieurs dixièmes de seconde dans le cas d’interaction urgente. De plus, ils laissent les organes vitaux (mains, pieds, yeux, etc.) libres et disponibles pour d’autres types de commandes simultanées.
Principe
- Une IND unidirectionnelle :
peut envoyer (tenant) vers une entrée machine ou recevoir (aboutissant) à partir d'une sortie machine des informations mais jamais les deux en même temps, car chaque interface est destinée à un usage spécifique, comme tout matériel d'entrées-sorties en informatique. Exemple d'IND unidirectionnelle : implant cochléaire (entrée), EEG contrôlant une prothèse (sortie)[2].
- En revanche, une IND bidirectionnelle : peut à la fois émettre et recevoir (comme un simple relais) des signaux. Exemple d'IND bidirectionnelle : IND de production de paroles[2].
Une interface neuronale directe est soit implantée dans un cerveau ; on parlera alors d'IND invasive, soit uniquement externe par le biais de technique d'imagerie cérébrale, comme l'EEG dans la plupart des cas. Elle désigne à la fois le cortex humain/animal ou une culture de neurones. Le cerveau ne doit pas être compris comme « une entité (système) capable de raisonnement uniquement logique », puisque seules les propriétés électriques des neurones sont exploitées.
Historique
La recherche sur les IND a commencé dans les années 1970 à l'université de Californie à Los Angeles (UCLA) grâce à une dotation de la National Science Foundation et suivie d'un contrat avec la Defense Advanced Research Projects Agency (DARPA)[3],[4]. Les publications scientifiques concernant ces recherches mentionnent pour la première fois l'expression brain-computer interface.
D'autres travaux, réalisés en groupe sous la direction de Schmidt, Fetz et Baker dans la même période établirent que, par une méthode d'entraînement par punition et récompense, des singes pouvaient rapidement apprendre à contrôler par la volonté la fréquence de neurones individuels du cortex moteur primaire[5].
Premiers travaux
L'étude de conditionnement réalisée par Fetz et ses collègues a tout d'abord démontré que le singe peut apprendre à contrôler la réponse d'un équipement de biofeedback par sa simple pensée[6]. Ce travail a permis, dès les années 1970, de démontrer que le singe est capable de contrôler l'activité individuelle des neurones ou de groupes de neurones dans le cortex moteur primaire, lorsque l'expérimentateur le récompense s'il utilise un chemin neuronal déterminé[7]. De cette époque datent aussi les premières études visant à comprendre les algorithmes qui régissent le cheminement neuronal menant à une action.
Dans les années 1980, Apostolos Georgopoulos, de l'université Johns-Hopkins, trouva, chez le macaque rhésus, une loi mathématique expliquant la direction de déplacement de son bras en fonction de l'activité électrique d'un simple neurone de son cortex moteur. Cette fonction était essentiellement une cosinus. Il découvrit aussi que ce sont des groupes de neurones dispersés dans plusieurs régions du cerveau qui contrôlent le mouvement. Malheureusement son équipement ne lui permit pas d'enregistrer l'activité dans toutes ces zones en même temps[8].
À partir des années 1990, la recherche sur les IND a progressé rapidement[9]. Plusieurs équipes de recherche, dont celles de Richard Andersen, John Donoghue, Phillip Kennedy, Miguel Nicolelis et Andrew Schwartz ont réussi à capturer les ondes provenant de centre moteurs du cerveau et à les utiliser pour contrôler des équipements.
Recherches les plus fructueuses
C'est Phillip Kennedy et ses collègues qui fabriquèrent la première interface cerveau-ordinateur intracorticale. Elle fut connectée par implantation d'électrodes dans le cerveau d'un singe.
En 1999 une équipe de chercheurs, menée par Yang Dan à l'université de Californie, Berkeley, réussit à décoder l'activité neuronale afin de reproduire les images vues par des chats. L'équipe utilisa pour cela un réseau d'électrodes implantées dans le thalamus (qui est le point d'entrée de tous les influx nerveux de perception). Plus précisément, ils visèrent 177 cellules cérébrales de la zone du noyau géniculaire latéral du thalamus, qui décodent les signaux en provenance de la rétine. Huit courts films furent projetés aux chats alors que l'activité de leurs neurones était enregistrée. Par l'utilisation de traitements mathématiques des signaux, les chercheurs purent décoder les signaux enregistrés et reconstruire ce que les chats avaient vu[10]. Des recherches similaires ont depuis été menées par des chercheurs japonais[réf. souhaitée].
Miguel Nicolelis a promu l'utilisation massive d'électrodes sur de larges zones du cerveau dans le but d'obtenir un signal très complet permettant de piloter une IND. On considère que ce type de dispositif permet de réduire la variabilité des résultats qui sont obtenus avec un plus petit nombre d'électrode. Ayant conduit plusieurs études sur le rat dans les années 1990, Nicolelis et ses collègues développèrent un IND capable de décoder l'activité neuronale chez le singe nocturne. Ils utilisèrent ce dispositif pour reproduire les mouvements du singe avec un bras robotisé. Les singes furent choisis pour leur très grande dextérité, ce qui rendait le champ d'investigation très étendu.
Dès les années 2000, cette équipe fabriqua un IND reproduisant les mouvements du singe hibou lorsqu'il manipule une manette pour attraper de la nourriture[11]. Cette IND fonctionnait en temps réel et permettait aussi de piloter un robot distant, à travers Internet. Le singe ne pouvant pas voir ce robot distant, cette expérience permit de tester un système IND à boucle ouverte (sans retour d'information).
Nicolelis réalisa ensuite ses expériences sur des singes rhésus, dont le cerveau est plus proche de celui des hommes. Les singes furent entrainés à atteindre et saisir des objets présentés sur un écran d'ordinateur. Leur pensée était décodée et transmise à un bras robotisé dont ils ne pouvaient voir les mouvements[12],[13]. Par la suite, les singes apprirent à contrôler les mouvements du bras robotisé en le regardant. L'IND captait l'intention de vitesse de déplacement ainsi que l'intention de force mise par le singe pour attraper les objets.
Plusieurs autres équipes ont développé des IND et les algorithmes nécessaires pour décoder les signaux neuronaux. Ce sont entre autres celle de John Donoghue de l'université Brown, celle de Andrew Schwartz de l'université de Pittsburgh et celle de Richard Andersen de Caltech. Ils ont mis au point des IND basées sur le décodage de l'activité d'un plus petit nombre de neurones (15 à 30 neurones contre 50 à 200 neurones pour l'équipe de Nicolelis).
L'équipe de Donoghue's a entraîné des macaques rhésus à utiliser une IND pour suivre des cibles visuelles sur l'écran d'un ordinateur avec ou sans utilisation d'une manette (boucle fermée ou boucle ouverte)[14]. L'équipe Schwartz a créé une IND permettant de simuler des mouvements dans un monde virtuel[15]. Ces recherches défrayèrent la chronique lorsqu'elles présentèrent un singe s'alimentant de pâtes grâce à un bras robotisé piloté uniquement par la pensée[16],[17].
L'équipe Andersen a enregistré, grâce à l'IND qu'elle a mise au point, l'activité des neurones de pré-mouvement du cortex pariétal postérieur. Ces neurones produisent un signal lorsque le singe anticipe de recevoir une récompense[18].
Actuellement des IND sont développés pour capter les signaux à l'origine de l'intention de mouvement d'un membre. Il existe aussi des IND pour prédire l'activité électrique des muscles (électromyographie)[19]. Ce type d'IND permet de restaurer la mobilité d'un membre paralysé en stimulant artificiellement les muscles.
Miguel Nicolelis et ses collègues ont démontré que la mesure de l'activité de certains grands groupes de neurones permet de prédire la position d'un membre. Ce travail est à l'origine de la création d'interface cerveau-machine, c'est-à-dire d'un système électronique qui lit l'intention de déplacement d'un membre et la convertit pour actionner un membre artificiel. Carmena et ses collègues[12] soutiennent que le cerveau du singe se réorganise afin d'inclure la représentation de bras robotisé comme une extension de son propre membre.
Le point de faiblesse de la technologie des IND est le manque de capteur permettant une perception fiable, sûre et robuste des ondes cérébrales. Il est probable que ce type de capteur sera disponible dans les années à venir. Ceci augmenterait grandement le nombre d'applications fournies par les IND.
Le développement d'une IND est compliqué et prend beaucoup de temps. Afin de répondre à cette problématique, le Dr Gerwin Schalk a développé un système polyvalent nommé IND2000, permettant de mener des recherches variées. IND2000 est développé depuis 2000 grâce à un projet mené par la « Brain–Computer Interface R&D Program » du Wadsworth Center (en) au New York State Department of Health, Albany, New York, États-Unis
Il existe aussi une technologie de détection à distance (sans connexion physique) utilisant la mesure de l'activité des canaux ioniques comme celui de la rhodopsine pour contrôler l'activité d'ensembles de neurones qui sont génétiquement apparentés. Cette technologie a permis de capter le processus de décision de déplacement de souris[20].
Applications
Depuis les années 1970, le champ de recherche sur les IND s'est spectaculairement étendu, principalement en ce qui concerne les neuroprothèses (neuroprosthetics), qui ont pour fonction de restaurer l'ouïe, la vue ou une incapacité motrice.
Grâce à la fantastique plasticité du cerveau, il a été constaté que l'influx nerveux produit par les prothèses peut, après un temps d'adaptation, être traité comme un influx naturel[21].
Grâce aux récentes avancées effectuées ces derniers temps, une IND permet non seulement de restaurer des facultés perdues (comme l'ouïe, la vue ou même les mouvements), mais est capable de plus d'étendre ces facultés, bien au-delà des capacités naturelles (comme le contrôle du curseur d'un PC à une vitesse et une précision impossibles à atteindre avec une simple souris, des jeux en ligne et même des membres robotisés).
Le "BCI Award"
Depuis 2010, une compagnie d’ingénierie médicale finance les « BCI Award » qui permettent aux équipes de chercheurs en IND du monde entiers de faire passer leurs publications devant un jury et peut-être remporter un prix de 3 000 $. On peut ainsi chaque année suivre les dernières avancées dans le domaine1. Dans les meilleures publications de ces dernières années, on retrouve par exemple la création de prothèses de main, pour les tétraplégique ou pour aider à soigner les douleurs fantômes dans un membre perdu. La majorité des avancées dans le domaine reste néanmoins à l’heure actuelle de l’ordre technique plus que pratique, le traitement des signaux produits par les influx nerveux étant très complexe à coder/décoder.
Prospectivement, certains ont imaginé la création d'un exocortex.
Communication par interface neuronale
_system.jpg)
Les patients dont les capacités de communication ont été altérées, peuvent bénéficier de la technologie d'une interface neuronale directe (entre autres par le biais du BrainGate) pour communiquer.
Par cette méthode, ils imaginent une souris d'ordinateur sous leur main et par la pensée, ils arrivent à déplacer un curseur sur un clavier virtuel modélisé sur un écran.
En plus de lettres, le clavier inclut des mots prédéfinis facilitant la composition de phrases ou d'idées.
Avec de la pratique, un utilisateur de clavier virtuel comme Matthew Nagle arrive à manipuler un clavier virtuel (via une interface neuronale) avec la même aisance que celui qui manipule une souris informatique conventionnelle.
Neuroprosthétique
La conception de neuroprothèses est une spécialité des neurosciences concernant les prothèses qui incorporent un système capable d'émuler les fonctions du système nerveux humain. La neuroprothèse la plus couramment utilisée est l'implant cochléaire, qui en 2006, était implantée sur environ 100 000 patients dans le monde[22].
Il existe un grand nombre d'autres prothèses, comme l'implant rétinien.
La différence entre IND et neuroprothèse réside essentiellement dans l'utilisation qui est faite de l'équipement : les neuroprothèses relient en général le système nerveux à une prothèse alors que les IND relient le système nerveux à un ordinateur. Le plus souvent les neuroprothèses sont connectées à n'importe quelle partie du système nerveux, par exemple les nerfs des membres, alors que les IND sont branchés sur le système nerveux central.
Pour des raisons justifiées évidentes, les deux termes sont parfois considérés comme interchangeables. En effet, toutes deux poursuivent le même but, à savoir restaurer l'ouïe, la vue, le mouvement ou une fonction cognitive, et exploitent des méthodes expérimentales et chirurgicales identiques.
Recherche sur les animaux
Plusieurs laboratoires ont étudié les signaux corticaux des singes et des rats afin de mettre au point des IND capables de reproduire des actions.
Des singes ont pu ainsi télécommander le déplacement d'un curseur sur un écran d'ordinateur ou commander un bras robotisé afin de réaliser des tâches simples grâce à leur pensée[23].
En mai 2008, les photographies montrant un singe pilotant un bras automatisé par sa pensée à l'université de médecine de Pittsburgh furent publiées dans plusieurs publications scientifiques de première importance[24].
IND adaptés aux humains
IND invasifs
Des technologies invasives d’IND ont été mises au point dans le but de restaurer la vue ou la mobilité chez l'être humain.
Ces systèmes sont connectés directement dans la matière grise du cerveau grâce à la neurochirurgie.
Étant connectés directement à la matière grise, ils offrent en théorie une meilleure qualité de signal mais dans la pratique, ils deviennent parfois enkystés, ce qui réduit la qualité du signal, voir l'annule complètement, et peux engendrer des complications médicales[25].
Dans le domaine public, William H. Dobelle est un des premiers scientifiques qui fut capable d'implanter une interface destinée à restaurer la vue.
Son premier prototype fut implanté sur "Jerry", un homme devenu aveugle adulte en 1978. Un unique réseau de 68 électrodes fut implanté dans son cortex visuel et permit de lui transmette la perception de la lumière.
Le système comportait une caméra montée sur des lunettes, envoyant un signal à l'implant. À l'origine cet implant permit à Jerry de percevoir les nuances du gris dans un champ de vision limité avec une vitesse de rafraîchissement lente.
Cela nécessitait aussi qu'il soit relié à un très gros système informatique, mais la miniaturisation de l'électronique et l'augmentation des performances permirent finalement de rendre le système portable.
Il put alors réaliser des tâches simple sans assistance[26].
En 2002, Jens Naumann, qui a aussi perdu la vue à l'âge adulte, est devenue la première d'un groupe de 16 patients qui furent dotés de la seconde génération d'implants Dobelle.
Ce fut une des premières offres commerciales d’IND. Cette deuxième génération utilise un implant plus sophistiqué qui transmet plus précisément les contours et offre une vision cohérente.
Les taches lumineuses sont réparties dans le champ de vision à la façon « d'étoiles dans la nuit ». Dès la mise en place de son implant Jens pu conduire une voiture à petite allure sur le parking de l'institut de recherche.
Des chercheurs de l'université Emory à Atlanta, dirigés par Philip Kennedy et Roy Bakay furent les premiers à implanter sur un homme une IND permettant d'émuler le mouvement. Leur patient, Johnny Ray (1944–2002), souffrait d'un ‘syndrome d'enfermement’ après une attaque cérébrale en 1997. L'implant fut branché en 1998 et il vécut suffisamment longtemps pour maîtriser son utilisation et put même piloter un curseur sur un écran d'ordinateur. Il est mort en 2002 d'une rupture d'anévrisme cérébral[27].
En 2005, le tétraplégique Matt Nagle fut la première personne capable de contrôler une main artificielle grâce à un IND. Il participa pendant neuf mois à un test de technologie cybernétique BrainGate. L'implant fut réalisé dans la région du gyrus précentral droit (zone qui contrôle le déplacement du bras). La technologie à 96 électrodes BrainGate permit à Nagle de contrôler un bras robotisé, ainsi qu'un curseur d'ordinateur, l'éclairage et la télévision[28]. L'année suivante le professeur Jonathan Wolpaw reçu le prix de la Fondation Altran pour l'innovation afin qu'il développe une interface utilisant des électrodes de surface plutôt qu'implantées dans le cerveau.
IND partiellement invasifs
Les IND partiellement invasifs utilisent un composant implanté dans la boîte crânienne qui ne pénètre pas dans la masse cérébrale. Cette technologie permet une meilleure résolution que les systèmes non invasifs (car le passage à travers la dure-mère distord le signal) et présente moins de risques que la technologie invasive.
L'électrocorticographie (ECoG) mesure l'activité électrique à la manière de l'électroencéphalographie mais grâce à des électrodes placées à l'intérieur de la boîte crânienne, entre la dure-mère et le cortex[29]. La technologie ECoG a été testée sur les humains par Eric Leuthardt et Daniel Moran de l'université de Washington à St Louis à partir de 2004. Une expérience a été menée afin de permettre à un adolescent de jouer au jeu Space Invaders en utilisant un implant EcoG[30]. Cette expérience a prouvé que cette technique offre un contrôle rapide, nécessitant peu d'adaptation et qu'elle constitue un compromis idéal entre qualité de signal et risque pour l'homme.
(Note : Ces électrodes furent implantées dans le cerveau du patient, souffrant d’épilepsie sévère, en même temps que des électrodes temporaires pour localiser le foyer de la maladie.)
Les IND utilisant une technologie d'« imagerie fonctionnelle portable » sont théoriquement réalisables, nécessitant l'implantation d'un laser dans la boîte crânienne : le laser serait focalisé sur un seul neurone et la réflexion serait mesurée par un senseur distinct. Quand le neurone s'active, la réflexion est modifiée. Ce qui permet de visualiser l'activité neurone par neurone.
Ce signal peut être subdural ou épidural, et ne nécessite pas de pénétrer le parenchyme lui-même. Il existe peu d'études à ce sujet, par manque de cobayes. Actuellement, la seule occasion de tester cette technologie se présente sur des patients qui nécessitent un monitoring invasif pour localiser une zone de résection d'un centre épileptique.
ECoG est un très bon compromis car elle offre une bonne résolution spatiale, un rapport signal/bruit faible, une large réponse en fréquence et nécessite moins d'entraînement que l'EEG extracrânien. Cette technologie est aussi moins complexe, présentant moins de risques cliniques et probablement une plus grande stabilité que le monitoring mono-neurone, ce qui permet d'envisager une mise en œuvre grand public.
IND non invasifs
Des technologies non invasives ont été testées sur l'homme. Les IND non invasives utilisent l'imagerie médicale. Ce type de signal (ondes cérébrales) a été utilisé pour induire des mouvements sur des cobayes (sujets) volontaires. Actuellement, les IND non invasives offrent une faible résolution car le signal (l'onde cérébrale) est altéré(e) par la traversée de la boîte crânienne, mais les IND non invasives sont bien plus simples à porter. Les ondes cérébrales peuvent effectivement être surveillées, contrôlées, même si la précision ne descend pas au niveau d'un neurone unique mais d'un groupe de neurones (théories et modèles computationnels).
EEG
L'électro-encéphalographie (EEG) est la technologie non invasive qui a été la plus étudiée, car elle offre une très bonne résolution temporelle, est facile à mettre en œuvre, portable et économique. Néanmoins, elle est pénalisée par la présence de bruits et l'utilisation de l'EEG en tant que IND nécessite un entraînement intensif.
Par exemple, lors d'expériences menées dans les années 1990, Niels Birbaumer de l'université Eberhard Karl de Tübingen en Allemagne, entraîna des patients gravement paralysés à réguler leur « potentiel cortical faible » mesuré par l'EEG afin de pouvoir contrôler un curseur d'ordinateur[31] (Birbaumer avait précédemment entraîné des patients épileptiques à éviter les crises par le contrôle de cette onde de faible potentiel). Cette expérience permit à dix patients de contrôler un curseur d'ordinateur par la maîtrise de leurs ondes cérébrales.
Le procédé était lent : après un entraînement de plusieurs mois, il fallait toujours plus d'une heure pour écrire 100 caractères.
Birbaumer's a ensuite travaillé avec Jonathan Wolpaw, de l'université de l'État de New York, à développer une technologie qui permette au patient de choisir le type d'onde cérébrale la plus facile à utiliser parmi les ondes mu et les ondes bêta.
Ces méthodes nécessitent d'éduquer le patient à moduler ses ondes cérébrales en se basant sur la mesure de ses ondes (feedback).
Elles sont contrôlées volontairement par le patient et ont donc une forte influence sur l'expérimentation.
Afin de déterminer l'influence du patient sur l'expérience, des études portant sur les signaux P300 ont été menées. À la différence des signaux mesurés précédemment, ces ondes sont générées de manière involontaire, (voir Potentiel évoqué) en fonction des perceptions (V.A.K.O.G) des patients.
Leur étude permet donc de reconnaître les pensées du patient sans avoir à l'entraîner au préalable. C'est la réponse naturelle de son cerveau lorsqu'il reconnaît quelque chose.
Lawrence Farwell[32] et Emanuel Donchin ont développé une IND utilisant la technologie de l'EEG à la fin des années 1980[33]. Cette « prothèse mentale » mesure les ondes P300 générées par des patients dont certains sont atteints de paralysie dues à un syndrome d'enfermement et leur permet de communiquer des commandes, lettres et mots à un ordinateur. Ceci leur a même permis de parler grâce à un synthétiseur vocal. Beaucoup d'autres équipements de ce type ont été développés depuis cette époque. Par exemple, en 2000, la chercheuse Jessica Bayliss de l'université de Rochester a montré que des volontaires équipés d'un casque de réalité virtuelle, lisant les ondes P300, peuvent contrôler les éléments d'un monde virtuel[34].
Au début des années 1990, Babak Taheri, de l'université de Californie à Davis présenta un nouveau type de capteur actif pour l'EEG. Cet équipement ne nécessite pas de préparation de la peau du patient, ne nécessite pas d'électrolyte conducteur et utilise des capteurs dont la taille est très réduite. Cette technologie, utilisée en mono-canal fut publiée en 1994[35]. Ce système actif utilise quatre zones de mesure et incorpore une électronique miniaturisée pour améliorer le rapport signal sur bruit, ainsi que la batterie. Des tests de fonctionnement furent réalisés sur des humains, selon quatre modes :
- EEG spontané
- mesure des potentiels évoqués au niveau des capteurs
- mesure du potentiels des cellules cérébrales
- potentiels évoqués liés à la cognition.
La performance de ce capteur « à sec » se révéla meilleure que celle présentée par les électrodes traditionnelles à l'argent/chlorure d'argent en termes de préparation de la peau et de rapport signal/bruit[36].
En 1999, des chercheurs de l'université Case Western Reserve, dirigés par Hunter Peckham, utilisa un système de casque EEG à 64 électrodes pour restaurer partiellement les mouvements de la main du patient quadriplégique Jim Jatich. Il lui suffisait de se concentrer sur des concepts simples et opposés comme « vers le haut / vers le bas » et ses ondes bêta étaient analysées par un logiciel pour identifier les formes de signaux associées. Une forme d'onde basique fut identifiée et permit de contrôler l'utilisation d'un interrupteur. Le concept « vers le haut » permettait de l'allumer, quand « vers le bas » permettait de l'éteindre. Le signal capté fut aussi redirigé vers les récepteurs nerveux de ses mains et permis de restaurer quelques mouvements[37].
La théorie des réseaux neuronaux permet de simuler sur ordinateur le fonctionnement du cerveau. En 2004, des expériences visant à simuler la phase d'apprentissage de réponse à des stimuli ont permis aux scientifiques de la Fraunhofer Society de réduire la phase d'apprentissage à 30 minutes[38].
Eduardo Miranda après avoir étudié, grâce à l'EEG, l'activité mentale de patients écoutant de la musique a créé une technologie pour leur permettre de s'exprimer musicalement en utilisant un « électroencéphalophone »[39].
La compagnie Emotiv Systems a produit un contrôleur de jeux-vidéo grand public qui utilise des capteurs électromagnétiques[40].
MEG et IRM
Les technologies non invasives de la magnétoencéphalographie (MEG) et de l'Imagerie par résonance magnétique fonctionnelle ont été utilisées avec succès en tant qu'interface cerveau ordinateur[41]. Plusieurs expériences rapportent que des patients ont été capables de jouer au jeu électronique Pong en temps réel par le contrôle volontaire de la réponse hémodynamique du flux sanguin dans leur cerveau (expérience de biofeedback)[42]. La mesure hémodynamique réalisée par IRMf, en temps réel, permet aussi de contrôler les mouvements d'un robot[43].
Plus récemment, au laboratoire Computational Neuroscience de la compagnie Advanced Telecommunications Research (ATR), à Kyōto, des scientifiques ont reconstruit sur ordinateur des images captées directement dans le cerveau. Le 10 décembre 2008, cette expérience fit la une de la revue Neuron[44]. Alors que les premières images étaient en noir et blanc dans une résolution de 10*10 pixels, les chercheurs pensent pouvoir reconstruire des images en couleur et même enregistrer les rêves[45],[46]. En 2013, des chercheurs de l'université de Kyoto parviennent à identifier une partie du contenu des rêves de patients en état hypnagogique grâce à l’imagerie par résonance magnétique fonctionnelle (IRMf), et en proposent une reproduction vidéo. Leurs travaux sont publiés dans la revue américaine Science[47].
Commercialisation
John Donoghue et ses collègues ont fondé la société « Cyberkinetic Neurotechnology Inc », qui est d'ores et déjà cotée sur le marché US. Cette entreprise commercialise une gamme de capteurs utilisant la technologie BrainGate, elle-même fondée sur le capteur Utah Array développé par Dick Normann. Cyberkinetic Neurotechnology Inc a pour objectif principal de proposer des interface cerveau ordinateur destinées à l'homme.
Philip Kennedy a créé Neural Signals en 1987 pour développer des IND permettant à des patients paralysés de communiquer et de contrôler des équipements. La compagnie commercialise des IND invasifs ainsi qu'un implant permettant de transmettre la parole. Les électrodes sont incluses dans du verre contenant des protéines afin d'améliorer la liaison aux neurones.
Bien que 16 patients payant aient reçu la prothèse de vision proposée par William H. Dobelle, la commercialisation a été arrêtée après sa mort en 2004. La compagnie Avery Biomedical Devices, qu'il contrôlait en association avec l'université de Stony Brook, développe un nouvel implant qui n'a pas encore reçu l'agrément de la Food and Drug Administration[48].
La compagnie Ambient, a fait la démonstration du produit « The Audeo » lors d'une conférence des développeurs IT au début de l'année 2008. Cet équipement permet de communiquer par la pensée. Le traitement du signal permet de reproduire le discours d'une personne an captant directement son intention de parler[49].
Mindball est un jeu développé et vendu par la compagnie Interactive Productline. Les joueurs sont en compétition pour contrôler le déplacement d'une balle sur une table de jeu par le seul moyen de leur concentration mentale[50]. Interactive Productline est une entreprise suédoise dont l'objectif est de développer et vendre des produits simples utilisant la technologie de l'EEG pour améliorer les capacités de relaxation et de concentration[51].
Une compagnie autrichienne, « Guger Technologies », ou « g.tec »[52], propose des interfaces cerveau ordinateur depuis 1999. Cette entreprise offre des produits basiques et polyvalents pour permettre à la communauté scientifique de développer des équipements spécifiques. Ceci inclut le P300 Speller, Motor Imagery et Mu-rythm. Ils commercialisent aussi une solution de capture des potentiels évoqués visuels.
La compagnie espagnole Starlab propose depuis 2009 un système 4 canaux nommé ENOBIO. Ce produit est conçu comme une plateforme de développements[53].
Des entreprises commercialisent des produits grand public, principalement pour jouer par IND, comme Neural Impulse Actuator, Emotiv Systems et NeuroSky.
Applications militaires
Les forces armées des États-Unis ont développé des interfaces cerveau ordinateur afin d'améliorer la performance de ses troupes et dans le but d'interférer avec les communications des troupes adverses[54].
Un rapport conclu :
« L'implémentation la plus réussie d'interface invasive a été réalisée lors d'essai médicaux utilisant l'influx des nerfs pour transférer l'information[55]. »
Le budget de la DARPA pour l'année 2009-2010 comporte le financement d'un programme nommé « Silent Talk » à hauteur de 4 millions de dollars. Ce projet doit permettre la communication d'homme à homme sur le champ de bataille, sans utiliser la parole, grâce à l'analyse du signal neuronal[56]. Une allocation complémentaire de 4 millions de dollars a été octroyée à l'université de Californie pour des recherches sur la télépathie synthétique par le biais d'un système informatique[56]. Ces recherches visent à détecter par EEG et à analyser les signaux neuronaux qui sont propagés avant que la parole soit exprimée et à déterminer si l'on peut définir des formes d'ondes standard correspondant aux mots[56]. Ces recherches sont incluses dans un programme de 70 millions de dollars, qui a débuté en 2000, avec l'objectif de développer un équipement capable de s'adapter au comportement de son utilisateur[57].
Interface sur des cultures de cellules
Des chercheurs ont construit des interfaces pour connecter des cellules nerveuses individuelles ou des réseaux de cellules in vitro. Ceci permet d'une part d'améliorer la recherche concernant les implants sur les animaux et d'autre part de réaliser des expérimentations visant à réaliser des réseaux neuronaux capables de résoudre des problèmes, de construire de petits ordinateurs ou des contrôleurs de robot.
- La technologie visant à stimuler et enregistrer l'activité de neurones connectés sur une puce électronique est appelée neuroélectronique ou neuropuce[58].
- La réalisation de la première neuropuce est attribuée à Jerome Pine and Michael Maher de l'université Caltech, en 1997. La puce Caltech permet de connecter jusqu'à 16 neurones.
En 2003, une équipe menée par Theodore Berger de l'université de Californie du Sud a commencé à travailler sur une neuropuce devant servir d'hippocampe artificiel. Cette puce est conçue pour fonctionner dans un cerveau de rat et devrait permettre de mettre au point des prothèses destinées à des cerveaux plus évolués. L'hippocampe a été choisi car on considère que c'est la structure cérébrale la plus organisée et la mieux connue. Elle a pour fonction de mémoriser les expériences sur le long terme dans d'autres parties du cerveau[59].
Thomas DeMarse à l'université de Floride a utilisé une culture de 25 000 neurones prélevés dans un cerveau de rat pour piloter un simulateur de vol de chasseur F-22[60]. À la suite du prélèvement, les neurones corticaux ont été cultivés dans une boîte de Petri et ont rapidement reformé un réseau synaptique afin de constituer un réseau neuronal actif. Les cellules furent ensuite installées sur une matrice de 60 électrodes et l'influx nerveux fut utilisé pour contrôler les commandes de profondeur et de lacet du simulateur. Cette étude fut menée afin de comprendre les mécanismes d'apprentissage du cerveau, à un niveau cellulaire.
Éthique
Les enjeux éthiques, sociaux et légaux liés aux IND sont[61],[62],[63],[64],[65] :
- problème conceptuel (quelle est la définition exacte, d’un point de vue technique, d’une IND ? Les chercheurs ne sont pas tous toujours d’accord sur la définition)[65]
- les IND étant principalement utilisée sur des personnes dans l’incapacité de communiquer, comment les informer et obtenir leur accord
- analyse de risque/bénéfice
- responsabilité partagée des équipes de chercheurs/développeur d’IND
- les conséquences des IND sur la qualité de vie des patients et de leurs familles
- effets secondaires (e.g. trouble du sommeil du à l’interférence de l’activité neuronale)
- responsabilité personnelle en cas d’utilisation inappropriée (comme la majorité des nouvelles technologie, pas de cadre légal encore bien fixé)
- questionnement sur la personnalité, sa modification, etc.
- rétrécissement de la séparation homme-machine
- applications thérapeutique, et ses possibles excès. Dans leur utilisation thérapeutique, la commercialisation des IND - à des tarifs très élevés - introduit une discrimination entre les patients. Le professeur en neuroscience Michael Crutcher de l'université Emory a déclaré à ce sujet, particulièrement en ce qui concerne les prothèses visuelles comme auditives : « Si seuls les riches peuvent se les acheter, cela désavantage tous les autres »
- questions éthiques sur les expérimentations sur les animaux, puis les humains
- violation de la vie privée importante avec la possibilité de « lire les pensée » en tout cas en partie
- possibilité de contrôler le sujet à travers l’IND, de la même manière que le sujet peut contrôler son (nouveau) corps à travers l’IND (« contrôle mental »). Plusieurs équipements disponibles dans le commerce, tels que le « brain pacemaker (en) », utilisé pour traiter certains états neurologiques, pourraient en théorie servir à modifier les comportements d'êtres humains en régulant l'activité neuronale ; cette possibilité soulève de nombreux problèmes éthiques. Les mêmes considérations s'appliquent pour les IND bidirectionnelles.
- utilisation de cette technologie dans des techniques d’interrogation avancées par des autorités gouvernementales
- amélioration sélective, stratification de la société. Il devient apparent que les IND ne seront pas seulement utilisées de manière thérapeutique, mais aussi pour l'amélioration de l'humain. De tels dispositifs commencent à émerger et des travaux préliminaires existent déjà chez l'animal, par exemple avec l'implantation d'un hippocampe artificiel chez le rat. Des systèmes de ce type pourraient permettre d'augmenter les capacités d'un être humain.
- communication aux média
- redéfinition de certaines branches de la médecine et de certaines maladies[66]
Dans leurs forme actuelle, la plupart des IND sont loin des enjeux exposés ci-dessus. Elles sont similaires aux thérapies correctionnelles actuellement pratiquées. Clausen a dit en 2009 que les IND posait des problèmes éthiques, mais qu’ils restaient pour l’instant similaires aux problèmes traités par les bio-éthiciens sur les autres domaines de thérapies[61]. De plus, il suggère que la bio-éthique est assez bien préparée pour affronter les défis qui pourrait arriver avec les technologies liées aux IND. Haselager et ses collègues[62] ont pointé le fait que les attentes quant à l’efficacité et la valeur des IND joue un grand rôle dans l’analyse éthique et la manière dont les scientifiques devrait approcher les médias. Qui plus est, des protocoles standard peuvent être implémentés pour assurer une approche éthique des patients atteint du syndrome d’enfermement.
Le cas des IND aujourd’hui retrouve sont parallèle dans la médecine, et le retrouvera dans ses évolutions futures. Comme les sciences pharmaceutiques qui au départ cherchent à résoudre des problèmes et finissent par produire des stimulants, les IND auront d’abord une utilité thérapeutique avant de devenir des moyens d’amélioration[64]. Les chercheurs sont tout à fait conscient que l’étique, un enthousiasme modéré dans les médias, et un suivi de l’éducation sur les IND va être d’une importance capitale pour une acceptation sociétale de cette technologie. C’est pourquoi, récemment, plus d’efforts ont été fournis dans la communauté des IND pour créer un consensus éthique sur la recherche, le développement et le partage[65].
Le cas des implants cochléaire[66]
Les implants cochléaires sont une des technologies d’IND les plus anciennes et les plus utilisée. Avec leurs apparition, la surdité a vécu une lente transition, de la simple perte d’un sens, à un problème neurologique solvable. C’est ce changement de paradigme qu’explique la chercheuse Laure Mauldin dans sa publication sur la redéfinition de la surdité. On y apprend que le fait de poser un implant sur un enfant engendre des changements important au sein de la famille. Tout d’abord, on passe de la situation où un sens est perdu, à celle où une possibilité de le retrouver est envisageable. Ensuite, il ne s’agit pas d’une technologie qu’il suffit de brancher pour qu’elle fonctionne : le patient doit souvent passer des années à s’accorder avec son implant avant de recouvrer la fonction perdue à un niveau bon. Dans le cadre des implants cochléaires chez les enfants, il s’agit également d’un défi pour les parents, qui doivent s’adapter en même temps que leurs enfant évolue et entraîne son cerveau à interagir avec ce nouvel outil. Cet un phénomène général aux IND qui est également décrit dans le cas de Matt Nagle, qui a également eu un apprentissage très long avant de pouvoir utiliser son IND de manière précise. Laure Mauldin décrit également des changements de personnalité chez les enfants : l’enfant découvre littéralement un nouveau sens et son cerveau subit une forte adaptation.
IND à bas prix
Récemment, un bon nombre de compagnie ont développé des technologies d'IND basée sur l'EEG à taille réduite et à moindre coût. Cette technologie a été implémentée dans des jouets et des interfaces vidéo-ludiques, et certaines de ces implémentations ont rencontré un grand succès, comme celles de NeuroSky[67].
- En 2006, Sony à patenté un système d'interface neuronale permettant aux ondes radio d'affecter les signaux neuronaux du cortex[68].
- En 2007, NeuroSky a lancé le premier EEG abordable pour les consommateurs avec le jeu NeuroBoy. Ce fut aussi le premier EEG répandu à utiliser la technologie de capteur sec[69].
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Brain–computer interface » (voir la liste des auteurs).
- L'abréviation BCI, issue de la dénomination anglaise brain computer interface, désigne habituellement les IND dans la littérature scientifique de langue française et internationale
- (en) Guger, C., Allison, B., Ushiba, J., Brain-computer interface research : a state-of-the-art summary (5e éd.), Springer International Publishing,
- (en) J. Vidal, « Toward direct brain-computer communication », Annual review of biophysics and bioengineering, vol. 2, , p. 157–80 (PMID 4583653, DOI 10.1146/annurev.bb.02.060173.001105)
- (en) J. Vidal, « Real-Time Detection of Brain Events in EEG », IEEE Proceedings, vol. 65, , p. 633–641 (DOI 10.1109/PROC.1977.10542, lire en ligne)
- Wilson, Mason P. IV Brain – Computer Interfacing, URI department of Biomedical and Electrical Engineering, 1 p.; Schmidt, E M.; McIntosh, J S; Durelli, L, et Bak, M.J. Fine Control of Operantly Conditioned Firing Patterns of Cortical Neurons. Exp Neurol, 1978, 61(2): 349-369.
- (en) E. E. Fetz, « Operant Conditioning of Cortical Unit Activity », Science, vol. 163, no 870, , p. 955 (PMID 4974291, DOI 10.1126/science.163.3870.955)
- (en) EM Schmidt, JS McIntosh, L Durelli et MJ Bak, « Fine control of operantly conditioned firing patterns of cortical neurons. », Experimental neurology, vol. 61, no 2, , p. 349–69 (PMID 101388)
- (en) A. Georgopoulos, J. Lurito, M Petrides, A. Schwartz et J. Massey, « Mental rotation of the neuronal population vector », Science, vol. 243, no 4888, , p. 234 (PMID 2911737, DOI 10.1126/science.2911737)
- (en) MA Lebedev et MA Nicolelis, « Brain-machine interfaces: past, present and future. », Trends Neurosci., vol. 29, no 9, , p. 536–46 (PMID 16859758, DOI 10.1016/j.tins.2006.07.004, lire en ligne)
- (en) GB Stanley, FF Li et Y Dan, « Reconstruction of natural scenes from ensemble responses in the lateral geniculate nucleus. », The Journal of neuroscience : the official journal of the Society for Neuroscience, vol. 19, no 18, , p. 8036–42 (PMID 10479703, lire en ligne)
- (en) Miguel A. L. Nicolelis, Johan Wessberg, Christopher R. Stambaugh, Jerald D. Kralik, Pamela D. Beck, Mark Laubach, John K. Chapin, Jung Kim et S. James Biggs, « Real-time prediction of hand trajectory by ensembles of cortical neurons in primates. », Nature, vol. 408, no 6810, , p. 361 (PMID 11099043, DOI 10.1038/35042582)
- (en) JM Carmena, MA Lebedev, RE Crist, JE O'Doherty, DM Santucci, DF Dimitrov, PG Patil, CS Henriquez et MA Nicolelis, « Learning to control a brain-machine interface for reaching and grasping by primates. », PLoS biology, vol. 1, no 2, , E42 (PMID 14624244, PMCID 261882, DOI 10.1371/journal.pbio.0000042)
- (en) M. A. Lebedev, JM Carmena, JE O'Doherty, M Zacksenhouse, CS Henriquez, JC Principe et MA Nicolelis, « Cortical Ensemble Adaptation to Represent Velocity of an Artificial Actuator Controlled by a Brain-Machine Interface », Journal of Neuroscience, vol. 25, no 19, , p. 4681 (PMID 15888644, DOI 10.1523/JNEUROSCI.4088-04.2005)
- (en) MD Serruya, NG Hatsopoulos, L Paninski, MR Fellows et JP Donoghue, « Instant neural control of a movement signal. », Nature, vol. 416, no 6877, , p. 141–2 (PMID 11894084, DOI 10.1038/416141a)
- (en) D. M. Taylor, SI Tillery et AB Schwartz, « Direct Cortical Control of 3D Neuroprosthetic Devices », Science, vol. 296, no 5574, , p. 1829 (PMID 12052948, DOI 10.1126/science.1070291)
- Pitt team to build on brain-controlled arm, Pittsburgh Tribune Review, 5 septembre 2006.
- YouTube – Monkey controls a robotic arm
- (en) S. Musallam, BD Corneil, B Greger, H Scherberger et RA Andersen, « Cognitive Control Signals for Neural Prosthetics », Science, vol. 305, no 5681, , p. 258 (PMID 15247483, DOI 10.1126/science.1097938)
- (en) David M. Santucci, Jerald D. Kralik, Mikhail A. Lebedev et Miguel A. L. Nicolelis, « Frontal and parietal cortical ensembles predict single-trial muscle activity during reaching movements in primates », European Journal of Neuroscience, vol. 22, no 6, , p. 1529 (PMID 16190906, DOI 10.1111/j.1460-9568.2005.04320.x)
- (en) D Huber, L Petreanu, N Ghitani, S Ranade, T Hromádka, Z Mainen et K Svoboda, « Sparse optical microstimulation in barrel cortex drives learned behaviour in freely moving mice. », Nature, vol. 451, no 7174, , p. 61–4 (PMID 18094685, DOI 10.1038/nature06445)
- (en) SP Levine, JE Huggins, SL Bement, RK Kushwaha, LA Schuh, MM Rohde, EA Passaro, DA Ross et KV Elisevich, « A direct brain interface based on event-related potentials. », IEEE transactions on rehabilitation engineering : a publication of the IEEE Engineering in Medicine and Biology Society, vol. 8, no 2, , p. 180–5 (PMID 10896180)
- (en) Laura Bailey, « University of Michigan News Service » (consulté le 6 février 2006)
- Miguel Nicolelis et al. (2001) Le neurobiologiste de Duke a développé un système qui permet à un singe de contrôler un bras robotisé par la pensée
- (en) Michele Baum, « Monkey Uses Brain Power to Feed Itself With Robotic Arm », Pitt Chronicle, 2008=09-06 (consulté le 6 juillet 2009)
- Vadim S. Polikov, Patrick A. Tresco et William M. Reichert, « Response of brain tissue to chronically implanted neural electrodes », Journal of Neuroscience Methods, vol. 148, no 1, , p. 1–18 (ISSN 0165-0270, DOI 10.1016/j.jneumeth.2005.08.015, lire en ligne)
- Vision quest, Wired Magazine, septembre 2002.
- (en) PR Kennedy et RA Bakay, « Restoration of neural output from a paralyzed patient by a direct brain connection. », Neuroreport, vol. 9, no 8, , p. 1707–11 (PMID 9665587)
- (en) Leigh R. Hochberg, « Neuronal ensemble control of prosthetic devices by a human with tetraplegia », Nature, vol. 442, no 7099, , p. 164–171 (PMID 16838014, DOI 10.1038/nature04970)
- Serruya MD, Donoghue JP. (2003) Chapter III: Design Principles of a Neuromotor Prosthetic Device in Neuroprosthetics: Theory and Practice, éd. Kenneth W. Horch, Gurpreet S. Dhillon. Imperial College Press.
- Un adolescent joue un jeu vidéo uniquement par la pensée, communiqué de presse, Washington University in St Louis, 9 octobre 2006
- En bref sur la télépathie : pouvez-vous interagir avec le monde alors que vous ne pouvez même pas cligner des yeux ?, Psychology Today, mai-juin 2003
- Lawrence Farwell
- (en) LA Farwell et E Donchin, « Talking off the top of your head: toward a mental prosthesis utilizing event-related brain potentials », Electroencephalography and clinical neurophysiology, vol. 70, no 6, , p. 510–23 (PMID 2461285, DOI 10.1016/0013-4694(88)90149-6)
- Press release, University of Rochester, 3 mai 2000
- (en) B Taheri, R Knight et R Smith, « A dry electrode for EEG recording☆ », Electroencephalography and Clinical Neurophysiology, vol. 90, no 5, , p. 376 (PMID 7514984, DOI 10.1016/0013-4694(94)90053-1)
- Active Micromachined Scalp Electrode Array for Eeg Signal Recording
- « The Next Brainiacs » Wired Magazine, août 2001.
- « Artificial Neural Net Based Signal Processing for Interaction with Peripheral Nervous System » Proceedings of the 1st International IEEE EMBS Conference on Neural Engineering. p. 134-137. 20-22 mars 2003.
- (en) Cane, Alan. « Mental ways to make music » Financial Times, Londres (RU), 22 avril 2005, p. 12
- (en) Emotiv Epoc "brain-wave" PC controller delayed until 2009
- (en) Ranganatha Sitaram, Andrea Caria, Ralf Veit, Tilman Gaber, Giuseppina Rota, Andrea Kuebler and Niels Birbaumer (2007) « FMRI Brain–Computer Interface: A Tool for Neuroscientific Research and Treatment »(Archive • Wikiwix • Archive.is • Google • Que faire ?)
- (en) « Mental ping-pong could aid paraplegics » Nature, 27 août 2004
- « To operate robot only with brain ». ATR et Honda ont développé la technologie IBM Tech-on, 26 mai 2006
- (en) Miyawaki, Y, H Uchida, O Yamashita, MA Sato, Y Morito, HC Tanabe, N Sadato et Y Kamitani, « Decoding the Mind's Eye – Visual Image Reconstruction from Human Brain Activity using a Combination of Multiscale Local Image Decoders », Neuron, vol. 60, no 5, , p. 915–929 (PMID 19081384, DOI 10.1016/j.neuron.2008.11.004)
- (en) « Scientists extract images directly from brain », PinkTentacle.com,
- (ja) « あなたの夢、映像化できるかも!? », Chunichi Web,
- Lucia Sillig, « Une machine à lire les rêves », sur Le Temps, (consulté le 4 mars 2016).
- « Press release »(Archive • Wikiwix • Archive.is • Google • Que faire ?) (consulté le 9 avril 2013), Stony Brook University Center for Biotechnology, 1er mai 2006
- Speak Your Mind
- Welcome to Mind Ball
- Interactive Productline|About us
- (en) « Site de Guger Technologies »
- (en) « ENOBIO »
- Top Pentagon Scientists Fear Brain-Modified Foes Noah Shachtman, Wired.com, 7/09/08.
- Commission pentagon report on brain–computer interfaces and neuroplasticity, mars 2008.
- (en) Katie Drummond, « Pentagon Preps Soldier Telepathy Push », Wired Magazine, (consulté le 6 mai 2009)
- (en) Shachtman Noah, « Pentagon’s PCs Bend to Your Brain », Wired Magazine, (consulté le 13 juin 2009)
- (en) A. Mazzatenta, M. Giugliano, S. Campidelli, L. Gambazzi, L. Businaro, H. Markram, M. Prato et L. Ballerini, « Interfacing Neurons with Carbon Nanotubes: Electrical Signal Transfer and Synaptic Stimulation in Cultured Brain Circuits », Journal of Neuroscience, vol. 27, no 26, , p. 6931 (PMID 17596441, DOI 10.1523/JNEUROSCI.1051-07.2007)
- Coming to a brain near you, Wired News, 22 octobre 2004
- 'Brain' in a dish flies flight simulator, CNN, 4 novembre 2004
- (en) Jens Clausen, « Man, machine and in between », Nature, vol. 457, no 7233, , p. 1080–1081 (ISSN 0028-0836 et 1476-4687, DOI 10.1038/4571080a, lire en ligne)
- Pim Haselager, Rutger Vlek, Jeremy Hill et Femke Nijboer, « A note on ethical aspects of BCI », Neural Networks, vol. 22, no 9, , p. 1352–1357 (ISSN 0893-6080, DOI 10.1016/j.neunet.2009.06.046, lire en ligne)
- (en) Guglielmo Tamburrini, « Brain to Computer Communication: Ethical Perspectives on Interaction Models », Neuroethics, vol. 2, no 3, , p. 137–149 (ISSN 1874-5490 et 1874-5504, DOI 10.1007/s12152-009-9040-1, lire en ligne)
- (en) Mark A. Attiah et Martha J. Farah, « Minds, motherboards, and money: futurism and realism in the neuroethics of BCI technologies », Frontiers in Systems Neuroscience, vol. 8, (ISSN 1662-5137, PMID 24860445, PMCID PMC4030132, DOI 10.3389/fnsys.2014.00086, lire en ligne)
- (en) Femke Nijboer, Jens Clausen, Brendan Z. Allison et Pim Haselager, « The Asilomar Survey: Stakeholders’ Opinions on Ethical Issues Related to Brain-Computer Interfacing », Neuroethics, vol. 6, no 3, , p. 541–578 (ISSN 1874-5490 et 1874-5504, PMID 24273623, PMCID PMC3825606, DOI 10.1007/s12152-011-9132-6, lire en ligne)
- (en) Mauldin, L., « Precarious Plasticity: Neuropolitics, Cochlear Implants, and the Redefinition of Deafness », Science, Technology, & Human Values, , p. 130-153
- (en) « Consumer brain–computer interfaces », Wikipedia, (lire en ligne)
- « Sony patent neural interface »
- « Mind Games »
Voir aussi
Articles connexes
Liens externes
Articles
- (en) Evolution of brain-computer interfaces: going beyond classic motor physiology, Journal of Neurosurgery, juillet 2009, a survey
Publications et vidéos
- (en) Brain–Computer Interfaces par Krishna Shenoy de l'université Stanford
- Jonathan D. Moreno, Mind Wars, Dana Press, 2006


