Problème à deux corps
Le problème à deux corps est un modèle théorique important en mécanique, qu'elle soit classique ou quantique, dans lequel sont étudiés les mouvements de deux corps assimilés à des points matériels[1] en interaction mutuelle (conservative), le système global étant considéré comme isolé[2]. Dans cet article, seul sera abordé le problème à deux corps en mécanique classique (voir par exemple l'article atome d'hydrogène pour un exemple en mécanique quantique), d'abord dans le cas général d'un potentiel attractif, puis dans le cas particulier très important où les deux corps sont en interaction gravitationnelle, ou mouvement képlérien, lequel est un sujet important de la mécanique céleste.
L'importance de ce problème vient en premier lieu de son caractère exactement intégrable, contrairement au problème à trois corps et plus. En effet le problème à deux corps, qui possède a priori six degrés de liberté, peut se ramener en fait à la résolution d'un problème à un corps à un seul degré de liberté[3].
Par ailleurs, les résultats obtenus permettent de rendre compte des trajectoires des planètes dans le système solaire (dans le référentiel héliocentrique) ainsi que celle de leurs satellites naturels ou artificiels, au moins en première approximation. On retrouve alors les lois de Kepler, mis en évidence par l'analyse des observations astronomiques dès le XVIIe siècle. Ainsi, la situation envisagée est loin d'être purement académique. La première résolution de ce problème a été exposée par Newton, qui a énoncé la loi fondamentale de la mécanique classique : le résultat est annoncé dans les propositions 57 à 65 de ses Principia.
Cet article a pour objet l'exposé et le traitement général du problème à deux corps, avec la démonstration des lois de Kepler et l'étude détaillée des différents types de trajectoires envisageables. La question de la détermination des éléments d'orbite ainsi que les équations de Kepler et de Barker et leurs applications font l'objet d'articles séparés (cf les articles mouvement képlérien, équation de Kepler et éléments d'orbite).
Situation envisagée et notations
Le problème à deux corps est celui de deux corps de masse m1 et m2, assimilés à des points matériels M1 et M2, respectivement, en interaction mutuelle. La force exercée par M1 sur M2 dérive d'un potentiel attractif V(r) et est notée : du fait de la troisième loi de Newton (ou principe des actions réciproques) il est évident que .


Le système global étant considéré comme isolé, il s'agit d'étudier le mouvement de M1 et M2 par rapport à un référentiel (R) supposé galiléen, dont le repère d'espace associé a pour origine O.
Les notations suivantes sont adoptées par la suite : , , et .



Les équations du mouvement dans (R) de chacun des corps s'écrivent alors, en utilisant la relation fondamentale de la dynamique :
- , (1).

La stratégie de résolution du problème est alors la suivante: tout d'abord se ramener à l'étude du mouvement d'un seul corps, en introduisant la notion de particule fictive ; ensuite, se ramener à un problème à une seule dimension, facilement résoluble.
Réduction à un problème à un corps
Le fait que le système soit isolé permet de séparer le mouvement trivial de son centre d'inertie de celui d'un corps par rapport à l'autre et en fait de se ramener à l'étude du mouvement d'une seule particule, dite fictive.
Conservation de la quantité de mouvement - référentiel barycentrique
L'addition des deux équations du mouvement donne aussitôt :
- , avec C centre de masse du système, de vecteur position .


Par suite, et comme cela était attendu pour un système isolé, le mouvement du centre de masse C dans (R) est rectiligne et uniforme (ou à la limite, au repos), et il est possible de se placer dans le référentiel du centre de masse (Rc) (qui sera galiléen, du fait du mouvement rectiligne et uniforme du corps auquel il est lié, (R) étant supposé galiléen), dit barycentrique, pour réécrire les équations du mouvement précédentes.
Introduction de la notion de particule fictive
En posant il est possible d'écrire :

- , (2).

Il suffit de prendre la différence entre les deux équations du mouvement (1), et de tenir compte du caractère galiléen du référentiel barycentrique qui implique , pour obtenir :

- .

Cette équation est en fait celle du mouvement d'un seul corps, à trois degrés de liberté :
- ,

avec , masse réduite du système, et .


Dans le référentiel barycentrique le problème se ramène donc au mouvement d'une particule dite fictive, de masse μ et de rayon-vecteur , les trajectoires des corps M1 et M2 se déduisant par homothétie, d'après les formules précédentes sur .


Il convient de remarquer que dans le cas particulier important où l'un des corps a une masse beaucoup plus importante que le second (corps central, généralement une étoile, ou une « grosse » planète), par exemple si , le centre de masse du système est pratiquement confondu avec ce corps central, et la masse réduite est pratiquement égale à celle de l'autre corps, . À noter toutefois que pour le mouvement de la Lune, qui dans le système solaire possède la plus forte masse relative d'un satellite par rapport à sa planète (1/81 Mt), cette approximation est relativement peu précise.


Intégrale première du moment cinétique - Planéité de la trajectoire - Loi des aires
Dans le cas particulier très important d'une force centrale, on a avec , le théorème du moment cinétique au centre de force noté O s'écrit :


- ,

ce qui implique .

Physiquement, cela impose que le vecteur position et le vecteur vitesse de la particule fictive soient à tout instant perpendiculaires à un vecteur constant: la trajectoire de M est donc plane[4],[5], le problème est donc à deux degrés de liberté.
Dans le plan de la trajectoire, défini comme celui généré par et , il est judicieux de se placer en coordonnées cylindro-polaires d'axe la direction Oz de , avec θ angle entre et , il vient :




- ,

par suite:
- (3).

Or l'aire élémentaire balayée par le rayon-vecteur pendant dt est donnée par :
- .

La vitesse aréolaire est donc constante pour la particule fictive (il en est de même par homothétie pour les corps réels) :
- ,

avec , la constante des aires.

Par suite, le rayon vecteur de chaque particule balaie des aires égales en des temps égaux. Cette propriété est en fait valable pour tout mouvement à force centrale. De par l'expression de C, il est facile de voir que la vitesse angulaire de la particule fictive est inversement proportionnelle à la distance r, et est donc maximale quand celle-ci est minimale, soit au périastre dans le mouvement képlérien - cf. infra.
Remarques :
- Un mouvement circulaire uniforme est un cas simple de mouvement obéissant à la loi des aires ;
- L'expression de L implique que la vitesse angulaire instantanée ne change jamais de signe le long de la trajectoire : en quelque sorte, la particule fictive, et donc les deux corps "réels" "tournent" toujours dans le "même sens" sur leurs trajectoires ;
- Si L=0, le mouvement est rectiligne : ce cas particulier (dit dégénéré) sera exclu par la suite.

Intégrale première de l'énergie - potentiel effectif
Le mouvement étant conservatif puisque la force dérive d'une énergie potentielle V(r), l'énergie totale est une intégrale première du mouvement :
- , or , soit en utilisant l'expression de la valeur du moment cinétique L :


- , (4),

avec potentiel effectif.

Finalement le problème se ramène à l'étude du mouvement d'un seul corps à un seul degré de liberté r. Ceci est toujours valable dans le cas du problème à deux corps, quelle que soit la nature du potentiel d'interaction.
Résolution analytique
D'après (4), il est possible d'exprimer la vitesse radiale , il vient : .


Il est alors possible de séparer les variables, et d'intégrer entre deux instants t0 et t, auxquels correspondent respectivement les positions radiales r0 et r, pour obtenir :
- , (4bis).

Ceci correspond, de façon implicite, l'équation horaire r(t).
Compte tenu de (4), il est alors possible d'obtenir une expression similaire pour θ :
- , (4ter).

Ces deux expressions sont, en pratique, difficiles à utiliser. Elles permettent toutefois de discuter qualitativement de la nature des mouvements possibles.
Étude qualitative des mouvements possibles
Dans l'expression de , le terme , toujours positif, correspond à une barrière centrifuge. Le potentiel V(r) étant supposé :


- attractif : on a donc V(r) monotone croissant pour tout r ;
- régulier en l'origine : c'est-à-dire , et donc le terme en 1⁄r2 domine quand .


Bien que cela ne soit pas indispensable, dans la suite V(r) sera également supposé borné à l'infini, soit avec un choix judicieux de l'origine des potentiels, . Par convention V(r) < 0[6].

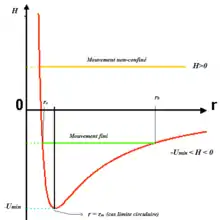
Avec ces conditions, valables pour les potentiels physiques usuels, le potentiel effectif présente un minimum absolu unique, noté pour tel que , et possède donc une cuvette de potentiel (cf. figure ci-contre, avec un potentiel newtonien).




Par ailleurs, on a que, d'après l'expression de H : , les valeurs de r permises doivent être telles que .


Il est dès lors possible d'envisager qualitativement les cas suivants (L étant non nul) :
- Énergie totale H>0 : puisque quand , cette condition est vérifiée pour toute valeur de avec rmin distance minimale d'approche[7] telle que . La particule fictive peut donc aller à l'infini avec une vitesse radiale positive, égale à [8].





- Énergie totale H = 0 : cas limite où la particule peut aller à l'infini, mais avec une vitesse radiale nulle, d'après la formule précédente, la distance minimale d'approche étant telle que , soit .


- Énergie totale : dans ce cas, la particule est confinée dans une région précise de l'espace, comprise entre les deux valeurs de r telles que (points d'arrêt). La vitesse radiale s'annule à chacun de ces points, toutefois ce n'est pas le cas de la vitesse angulaire instantanée (cf. expression de H et remarques à son sujet).


- Du fait du confinement du mouvement, la durée Δt pour que r varie de rmin à rmax peut être obtenue aisément en utilisant l'expression intégrale donnant t. Comme l'invariance dans le temps du hamiltonien implique que cette durée sera la même pour aller de rmax à rmin, le mouvement radial est donc périodique de période T donnée par :
- , et en une période radiale où l'angle θ varie de la quantité Δθ, donnée par l'expression intégrale de θ :

- .

- Toutefois, il est important de souligner que le confinement du mouvement n'implique nullement que la trajectoire du mobile soit une courbe fermée. Pour cela, il faudrait en effet que avec m et n entiers. Dans ce cas, et seulement dans ce cas, le rayon vecteur retrouve sa valeur initiale après n périodes « radiales » T, puisque qu'alors il aura « tourné » de 2mp : nT sera en fait la période du mouvement et de la fonction θ(t). Une telle situation correspond à des périodes radiale et angulaire qui sont commensurables, et il s'agit d'une condition nécessaire et suffisante pour que le mouvement borné s'effectue selon une courbe fermée. Cette condition n'est remplie que par le potentiel newtonien en 1/r et le potentiel harmonique spatial isotrope V(r)=kr2 (ce dernier cas ne sera pas considéré plus avant) : ce résultat constitue le théorème de Bertrand.

- Énergie totale : il s'agit du cas limite où la seule valeur permise de r est rm, et dans ce cas la trajectoire est un cercle de ce rayon.

- Énergie totale : ces valeurs de r sont interdites et ne correspondent à rien de physique.

Il sera montré plus bas que chacun de ces cas correspond aux formes particulières de trajectoires pour le mouvement képlérien, à savoir une hyperbole, une parabole, une ellipse et un cercle. La discussion précédente peut être résumée graphiquement sur la figure ci-contre.
Dégénérescence du mouvement
L'étude précédente a été faite en supposant . Si L = 0, on a tout simplement à tout moment, et le mouvement est purement radial : il est dit dégénéré. La discussion précédente se simplifie, la condition (4bis) précédente se résume à , vérifiée dans tous les cas si . Dans le cas contraire, il est facile de vérifier que la particule "tombe" sur le centre de force.




Cas du mouvement képlérien
Le mouvement képlérien correspond au cas où les deux corps sont en interaction gravitationnelle, c'est-à-dire avec le potentiel d'interaction , et donc , avec masse totale du système. Tout se passe alors comme si la particule fictive M subissait l'interaction gravitationnelle d'un corps affecté de la masse totale du système placé à l'origine O du rayon-vecteur. Si les résultats généraux précédents, valables d'ailleurs pour tout mouvement dans un potentiel central conservatif V(r), permettraient d'ores et déjà de déterminer l'équation horaire de r = r(t), le potentiel newtonien possède une intégrale première particulière, le vecteur de Runge-Lenz, qui permet d'obtenir de façon simple l'équation de la trajectoire.



Existence d'une intégrale première additionnelle
Le potentiel newtonien en se caractérise par l'existence d'un invariant supplémentaire particulier, l'invariant de Runge-Lenz, donné par:

- , (5)[9]






Équation de la trajectoire de la particule fictive
Il est évident que donc est contenu dans le plan du mouvement. Par suite, il est possible de prendre comme angle polaire l'angle w entre et , avec bien sûr [10], et en notant e la norme de il est facile de vérifier :



- , soit compte tenu de l'identité
- :


- , avec .


Physiquement, p = rm, valeur de r pour laquelle Ueff(r) est minimal. De fait puisque , il vient facilement par dérivation à soit en effet rm = p.


L'équation de la trajectoire obtenu est donc celle d'une conique d'excentricité e et de paramètre p :
- , (6),

dont le centre de force occupe l'un des foyers. Le vecteur est donc dirigé vers le point de distance minimale (ou périastre), distance notée q avec , correspondant à w = 0. En ce point, la vitesse angulaire orbitale est maximale. L'angle w est appelé anomalie vraie en astronomie.


Par homothétie, chacun des corps réels décrit dans le référentiel barycentrique une conique dont le centre de masse occupe l'un des foyers. La valeur de e détermine la nature de la conique :
- Si e > 1, la trajectoire est une hyperbole : dans ce cas les corps célestes ne sont pas liés et peuvent aller à l'infini ;
- Si e = 1, la trajectoire est une parabole ;
- Si 0 < e < 1, la trajectoire est une ellipse. C'est le cas des planètes et de la plupart des autres corps du système solaire, où par surcroît le centre de masse est pratiquement confondu avec la position du Soleil, ce qui permet de retrouver la première loi de Kepler (1609) : « Au cours de leur mouvement autour du Soleil, les planètes décrivent des ellipses dont le Soleil occupe l'un des foyers ». La seconde loi (1609 également) découle directement de la constance de la vitesse aréolaire, et porte d'ailleurs le nom de loi des aires : « Le rayon-vecteur reliant le Soleil à une planète balaie des aires égales en des temps égaux ».
- Si e=0, la trajectoire est circulaire.
Remarque sur le caractère particulier du champ newtonien
L'obtention de trajectoires fermées pour les champs newtoniens est remarquable, et découle en fait d'une symétrie particulière. En effet, d'après le théorème de Noether, les lois de conservation sont liées à l'existence de symétrie particulière du problème.
Ainsi l'invariance par translation du système global des deux corps (liée au caractère supposé isolé du système) conduit à la conservation de la quantité de mouvement du système global, tandis que l'invariance par rotation (isotropie) du champ central conduit à celle du moment cinétique et l'invariance par translation dans le temps (qui suppose l'absence de « frottements ») à la conservation de l'énergie totale. L'existence de ces intégrales premières permet de passer successivement de 6 à 3 puis 2 et enfin un degré de liberté. Toutefois, même pour le mouvement fini, les deux corps n'ont aucune raison de décrire des courbes fermées, et seule une symétrie additionnelle y conduit, et se traduit par l'existence de l'intégrale première particulière du champ en 1/r2, le vecteur de Runge-Lenz (ou, de façon équivalente, le vecteur excentricité).
Il est clair d'après ce qui précède que l'équation de la trajectoire s'obtient simplement par projection du rayon-vecteur sur ce vecteur constant particulier qui définit une direction particulière de l'espace, en pratique l'axe de la conique. Ce type de symétrie ne peut cependant s'interpréter correctement qu'à quatre dimensions, cf. article particulier.
En mécanique quantique, cet observable supplémentaire se retrouve dans l'étude de l'atome d'hydrogène, qui correspond à un problème à deux corps quantique, et ceci se traduit par la dégénérescence « accidentelle » des niveaux d'énergie de l'électron, qui ne dépendent pas du nombre quantique orbital l lié au moment cinétique. Là encore, une symétrie additionnelle spécifique au champ coulombien, et interprétable seulement à 4 dimensions, explique ce phénomène.
En creux, ces considérations montrent que dans un cas où il est tenu compte des perturbations dues aux autres corps célestes, le potentiel subi ne sera plus en 1/r2 et le vecteur de Runge-Lenz ne sera plus strictement une intégrale première du mouvement. Les trajectoires ne seront plus rigoureusement des coniques, courbes fermées (pour 0 < e < 1). C'est de fait ce qui est observé, avec des orbites elliptiques qui « tournent » lentement dans l'espace, phénomène d'avance du périhélie, qui en toute rigueur s'interprète dans le cadre de la relativité générale.
Relation entre l'excentricité et les intégrales premières du mouvement
Dans un repère d'espace Oxyz fixe lié à (Rc), l'axe Ox de la conique, orienté vers le point de distance minimale au foyer de vecteur unitaire , Oz la direction du moment cinétique , et comme au périastre et r = q, l'intégrale première de l'énergie peut être exprimée en fonction de cette distance minimale, il vient :



- ,

ce qui implique .

De même, il est possible d'exprimer le vecteur excentricité de façon simple :
- .



En remplaçant dans cette expression celle obtenue pour L2, l'expression de l'excentricité de la conique se met sous la forme :
- .

Il est alors possible d'éliminer la distance minimale q dans cette expression compte tenu de , et d'obtenir une relation entre l'excentricité e et les deux intégrales premières H et L. Il vient par substitution dans l'expression précédente de l'excentricité :

- , soit finalement : .


Ces deux dernières expressions n'ont bien sûr de sens physique que si , et permettent de retrouver les différents cas vus plus haut :

- Cas de la trajectoire hyperbolique : e > 1 ce qui implique H > 0[11], comme il a été dit le mobile fictif peut aller en l'infini, avec une vitesse purement radiale non nulle, donnée par ;
- Cas de la trajectoire parabolique : e = 1 implique H = 0, là-aussi le mobile peut aller en l'infini avec une vitesse nulle.
- Cas de la trajectoire elliptique : 0 < e < 1 implique que l'on a .

- Cas de la trajectoire circulaire : e = 0 donc .

Remarque : dans le cas d'un engin spatial en orbite, capable de modifier son énergie cinétique et donc H et L, l'expression précédente de e montre qu'il est possible, en « choisissant » correctement l'impulsion correctrice, de modifier la valeur de l'excentricité e de la trajectoire : ceci est couramment employé pour amener les satellites vers les orbites désirées en utilisant des "orbites de transfert" appropriées. Il est même possible le cas échéant d'échapper à l'attraction terrestre, pour des sondes interplanétaires par exemple.
Cas du mouvement elliptique
Le mouvement képlérien elliptique est très important pour l'astronomie (orbites des planètes dans le système solaire, satellites artificiels, par exemple). Il sert en tout cas de point de départ à des calculs plus avancés, la prise en compte de l'influence d'autres corps célestes ou d'autres facteurs se faisant le plus souvent comme perturbation de ce mouvement « idéal ».
Principaux paramètres de la trajectoire
Une ellipse peut se définir comme le lieu des points M tels que la somme des distances à deux points fixes appelés foyers notés F1 et F2 est constante : , a étant le demi-grand axe de l'ellipse, c'est-à-dire la demi-distance entre les deux sommets que sont pour une trajectoire le périastre P et l'apoastre A, point le plus éloigné du centre de force (qui occupe l'un des foyers) de l'orbite (cf. figure).

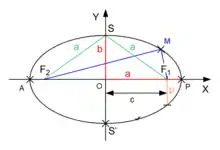
En notant Q la distance au foyer de ce dernier point, qui correspond à , il vient : , et on en déduit . L'ellipse possède un centre de symétrie O à mi-distance des foyers, par lequel passent ses deux axes de symétrie perpendiculaires, dits grand et petit axe.



Le paramètre p de l'ellipse correspond lui à la valeur de r pour w = p/2.
La demi-distance au foyer est notée c, on a de façon évidente . On déduit le demi-petit axe, noté b : . On peut éliminer e entre les équations donnant a et b, il vient l'expression du paramètre de l'ellipse : .



En combinant ces formules, on obtient respectivement pour le périastre q et l'apoastre Q : et .


Aspects énergétiques - Équation des forces vives
Pour obtenir l'équation qui tire son nom, « forces vives », du concept leibnizien de la force, on remplace l'expression de la distance au périastre dans la relation (9) excentricité-énergie, il vient :

- , d'où l'on tire l'expression de l'énergie mécanique totale en fonction de la valeur du demi-grand axe a :
- , (10bis).


Par suite, l'énergie totale est égale à la moitié de l'énergie potentielle de gravitation pour r = a. Comme H = cte, il vient :
- , d'où l'on tire l'expression de la valeur de la vitesse v de la particule sur la trajectoire en fonction de r et a, dite équation des forces vives :
- , (10ter).


Cette équation est d'usage fréquent en astronautique. On constate donc que la mesure du demi-grand axe est directement liée à l'énergie totale de la particule fictive, et que si on a , comme on doit s'y attendre puisque la trajectoire elliptique tend alors vers une trajectoire parabolique.


Troisième loi de Kepler
Le mouvement elliptique étant fini, il est périodique de période T, dite période de révolution ou période orbitale, les lois physiques étant invariantes par translation dans le temps. Or cette période est facile à mesurer pour un corps céleste donné par des observations astronomiques, comme l'est également la valeur du demi-grand axe a. Or il existe une relation simple entre période de révolution et demi-grand axe, mise en évidence expérimentalement pour la première fois par Kepler en 1618.
La vitesse aréolaire étant constante avec , on obtient en intégrant sur la période T du mouvement l'aire totale de l'ellipse, égale à , d'où l'identité , qui donne , où il a été fait usage de .




Or par définition, ce qui donne finalement en éliminant le moment cinétique la relation fondamentale : .


Autrement dit : les cubes des demi-grand axes des orbites sont proportionnels aux carrés des périodes de révolution.
Dans le cas d'une planète du système solaire, la masse du Soleil est pratiquement égale à la masse totale du système, et on écrit , avec constante de Gauss.


En faisant cette approximation, on peut écrire pour deux planètes quelconques du système solaire, avec des notations évidentes :
- .

Ainsi la connaissance du demi-grand axe d'une planète (par exemple la Terre, que l'on peut mesurer très précisément par des méthodes astrométriques) et des périodes orbitales (par des observations) permet de déterminer les demi-grands axes de toutes les planètes du système solaire. On peut procéder de même pour tous les autres "systèmes" (e.g. une étoile et ses planètes, une planète et ses satellites...) où l'on peut négliger la masse d'un corps donné devant celle du corps "central" (étoile, planète).
On appelle moyen mouvement, noté n, la vitesse angulaire moyenne du corps céleste sur son orbite : , on a donc d'après la troisième loi de Kepler :

- .

Cas limite de la trajectoire circulaire - vitesse de satellisation minimale
Quand e = 0, l'ellipse est dégénérée et se ramène à un cercle de rayon R = p et de centre O, confondu avec les deux foyers. Tout axe passant par le centre est axe de symétrie de la trajectoire. D'après (3) la vitesse angulaire est constante (on retrouve donc bien une « loi des aires » triviale).

Sur le plan énergétique, d'après la formule (10) et comme il a été dit précédemment (cf. partie 3.1-4, cela correspond au minimum physique de l'énergie totale H avec , donc une énergie cinétique radiale nulle. L'énergie potentielle effective est donc minimale, ce qui correspond physiquement au point où les termes de barrière centrifuge en 1/r2 et du potentiel attractif "centripète" en 1/r s'équilibrent.



Ce n'est que pour cette énergie mécanique minimale que l'on peut avoir satellisation du mobile fictif autour du centre de force à la distance R (et donc également d'un corps "réel" autour de l'autre), une valeur plus basse conduit à la « retombée » de la particule fictive sur le centre de force. À cette énergie mécanique minimale correspond une valeur particulière de la vitesse v dite vitesse de satellisation minimale ou « première vitesse cosmique ». En effet, d'après l'équation des forces vives (10ter), on pour la trajectoire circulaire de rayon R = a une vitesse purement orthoradiale et de valeur constante donnée par :
- , (11).

Dans les applications (astronautique), cette vitesse est en fait indépendante de la masse du corps « satellite », puisque la masse totale équivaut alors à celle de l'astre « central ».
Exemple : Pour la Terre, on a au minimum R = 6 400 km (surface de la Terre), ce qui donne environ v1 ≈ 7,9 km s−1.
Cas du mouvement parabolique
Le mouvement parabolique est un cas limite du mouvement elliptique quand l'excentricité e tend vers 1. Intuitivement, cela correspond à une ellipse de plus en plus allongée, le périastre P se rapprochant du foyer F1, l'autre foyer F2 se retrouvant lui « projeté » de plus en plus loin. À la limite il est rejeté à l'infini tout comme l'apoastre A, et l'ellipse « s'ouvre » au niveau du point A pour donner une parabole.

Principaux paramètres de la trajectoire
Ce cas correspond à e = 1, et l'équation polaire au foyer de la trajectoire s'écrit alors : . Le périastre P correspond à w = 0 et est situé à la distance q = p/2 du foyer F, et on a pour . La direction (FP) est axe de symétrie de la courbe, et il n'existe par d'apocentre à distance finie.



La figure ci-contre récapitule les principales caractéristiques de la trajectoire.
Aspect énergétiques - vitesse de libération
D'après la relation (10) et comme indiqué précédemment, ce cas limite correspond à H=0. Dans ce cas, l'énergie cinétique totale est toujours égale à l'énergie potentielle de gravitation, soit à r donné : , il vient aussitôt une expression simple de la vitesse sur la trajectoire à r quelconque, qui correspond à l'équation des forces vives pour le mouvement képlerien parabolique : , (12).


Cette relation correspond à l'équation dite des forces vives trouvée pour le mouvement elliptique, relation (10ter), avec .
Cette valeur de la vitesse est maximale au périastre situé à la distance r = q, où la vitesse est purement orthoradiale. On définit dès lors pour une distance R donnée la vitesse de libération ou "seconde vitesse cosmique" comme .

Il s'agit alors de la vitesse minimale qu'il faut imprimer (de façon orthoradiale) à la particule fictive placée à la distance R donnée du centre de force pour que celle-ci puisse « échapper » à l'attraction gravitationnelle exercée par celui-ci, en lui permettant d'aller à l'infini, suivant une trajectoire parabolique.
Exemple : Pour la Terre depuis sa surface, on a v2 ≈ 11,2 km s−1.
Concrètement, il est possible de donner à un objet tel qu'une sonde spatiale une trajectoire parabolique de foyer le centre C d'un astre donné (comme la Terre)[12] et de sommet un point donné M de l'espace tel que R=CM en communiquant à l'engin une vitesse de valeur égale à la vitesse de libération pour R, et dirigée perpendiculairement à la direction radiale (CM). Ceci peut parfaitement être fait depuis une orbite elliptique initiale, en partant du périastre : en effet, en ce point la vitesse de l'engin est orthoradiale et a une valeur maximale, bien que la vitesse de libération au périastre soit plus élevée que celle à l'apoastre.
Principaux paramètres de la trajectoire
Si e > 1, la valeur de r tend vers l'infini pour , les deux directions et , symétriques par rapport au grand axe (FP), définissent les asymptotes à la courbe de la trajectoire. Les valeurs de w telles que correspondent à des valeurs de r négatives : il s'agit en fait de l'autre branche de l'hyperbole, qui serait parcourue dans le cas d'un champ répulsif (cf. diffusion Rutherford). Physiquement, la seule branche parcourue est celle la plus proche du foyer F.




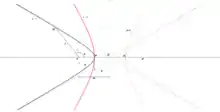
Les deux asymptotes de l'hyperbole se coupent en un point O du grand axe, centre de symétrie de la courbe mathématique complète, à deux branches. On peut définir un point F’ symétrique de F par rapport à O qui est le foyer de la deuxième branche de l'hyperbole. Comme pour toutes les coniques, le périastre P est situé à la distance du foyer et constitue le sommet de la trajectoire. On peut définir un "apoastre" A correspondant à w = p, et correspondant au sommet de la deuxième branche. Ce point est situé à la distance du foyer, la distance entre P et A correspondant étant . Cette valeur du "demi-grand axe" a permet d'écrire , et , la distance du centre de symétrie O à un foyer étant ae.






La courbe ci-contre résume les caractéristiques de la trajectoire en montrant deux exemples d'hyperboles, de même paramètre, une avec e = 2 et l'autre avec e=5.
Aspects énergétiques - équation des forces vives
Il est possible de mettre en évidence comme pour le cas de la trajectoire elliptique une relation entre H et le demi-grand axe a de l'hyperbole défini plus haut. En effet au périastre P où r = q = a(e–-1) la vitesse est purement orthoradiale et l'énergie mécanique H s'exprime sous la forme : , or on a , ce qui donne par substitution dans l'équation précédente :


- , soit finalement la relation : , (13).


Cette relation est identique à celle obtenue pour le mouvement elliptique, en changeant a en –a. On obtient alors, en procédant de la même façon que pour le cas elliptique, l'équation des forces vives pour le mouvement hyperbolique :
- , (14).

Illustrations
Quelques animations représentant les orbites de deux corps (disques blancs) autour du barycentre (croix rouge).
 Deux corps de même masse |
 Un corps de masse légèrement plus importante que l'autre |
 Un corps de masse plus importante que l'autre |
 Un corps de masse bien plus importante que l'autre | ||
 Deux corps de même masse, orbites elliptiques |
 Un corps de masse plus importante que l'autre en mouvement linéaire | ||||
Références
- Ceci est valable dans le cas où les dimensions des deux corps sont très petites devant leur distance au cours du mouvement.
- Cette approximation revient à négliger l'influence d'autres corps, à considération de l'importance relative de leurs actions sur chacun des deux corps. Par exemple pour le mouvement d'une planète autour du soleil, l'interaction dominante est bien sûr celle de l'étoile sur la planète, on peut négliger au moins en première approximation les effets des interactions des autres corps du système solaire tant sur le Soleil que sur la planète considérée. Toutefois il conviendra d'en tenir compte de façon perturbative pour une description plus complète.
- En fait, à deux problèmes à un corps indépendants, mais le mouvement du centre d'inertie est trivial.
- Par homothétie, il en est bien sûr de même de celles des particules réelles M1 et M2.
- Toutefois, si , le mouvement est dit dégénéré et se réduit à une droite, la notion de planéité de la trajectoire n'a aucun sens
- Cette dernière condition n'est pas absolument nécessaire, on obtient également une cuvette de potentiel, certes infinie, avec un potentiel spatial harmonique de la forme avec k>0, mais cet exemple ne sera pas considéré ensuite.
- Cette distance minimale d'approche correspond à une vitesse radiale nulle à distance finie.
- En l'infini, la vitesse est purement radiale : en effet, le terme orthoradial est celui en 1⁄r2, et donc tend vers 0 à grande distance.
- En toute rigueur le vecteur de Runge-Lenz est classiquement défini par .
- Cela revient à un changement d'origine, qui ne remet pas en cause les résultats précédents, notamment le fait que L = cte, puisque ceci ne dépend que de la valeur de la vitesse angulaire .
- On pourrait aussi avoir L=0 pour H quelconque, toutefois le paramètre p est alors nul et on n'obtient plus une parabole, mais simplement une "conique" dégénérée en droite : voir remarque plus haut sur la dégénérescence du mouvement. Ce cas trivial ne sera plus envisagé par la suite.
- On confond ici centre de l'astre et centre de masse du système {sonde - astre}, vu les rapports entre les masses des deux objets.



Ouvrages utiles :
- Dumoulin et Parisot, Astronomie pratique et informatique, Masson, Paris, 1987.
- Perez, Cours de physique : mécanique - 4e édition, Masson, Paris, 2001.
- Landau et Lifchitz, Cours de physique - Tome I : Mécanique, Ellipses - Marketing, Paris, 1994.
Sur Internet :
- Luc Duriez, Cours de mécanique céleste classique, université Lille-I / IMCCE, 2002, très complet, disponible à l'adresse suivante en pdf : http://www.imcce.fr/fr/formations/cours/CoursMC_Duriez/mc/CoursMCecr_Duriez.pdf .
Articles connexes
 Portail de la physique
Portail de la physique  Portail de l’astronomie
Portail de l’astronomie