Machine synchrone
Une machine synchrone est une machine électrique qui :
- soit produit un courant électrique dont la fréquence est déterminée par la vitesse de rotation du rotor : fonctionnement en « générateur électrique » dans deux quadrants du plan couple-vitesse[1],[2],[3]. L'alternateur est une application particulière de la machine synchrone, fonctionnant en générateur dans un seul quadrant du plan couple-vitesse ;
- soit absorbe un courant électrique dont la fréquence détermine la vitesse de rotation du rotor : fonctionnement « moteur »[4],[5],[3].

Au-delà de quelques kilowatts, les machines synchrones sont généralement des machines triphasées. Le rotor, souvent appelé « roue polaire », est alimenté par une source de courant continu ou équipé d'aimants permanents.
Invention
La machine synchrone est inventée par Nikola Tesla. Son concept figure dans un dépôt de sept brevets du où il en décrit plusieurs variantes ainsi que le principe du courant alternatif biphasé et triphasé et leur distribution[6]. Tesla aurait développé cette idée de machine électrique quand il était étudiant à l'École polytechnique de Graz[6] (1875-1876).
Principes généraux

La machine synchrone se compose d'une partie tournante, le rotor, et d'une partie fixe, le stator. Le rotor peut se composer d'aimants permanents ou être constitué d'un bobinage alimenté en courant continu et d'un circuit magnétique (électro-aimant).
Pour produire du courant, on utilise une force extérieure pour faire tourner le rotor : son champ magnétique, en tournant, induit un courant électrique alternatif dans les bobines du stator. La vitesse de ce champ tournant est appelée « vitesse de synchronisme ».
Il n'est pas possible de faire démarrer correctement, sans aide extérieure, une machine synchrone en connectant ses enroulements statoriques directement sur un réseau alternatif. Mais, si l'on n'entraîne pas le rotor par une force extérieure, il est possible de la faire tourner en alimentant ses enroulements statoriques par un courant alternatif dont la fréquence augmente progressivement de zéro à la fréquence de synchronisme et en faisant en sorte que la tension aux bornes des enroulements soit proportionnelle à la fréquence. Sa vitesse de synchronisme sera directement liée à la fréquence de l'alimentation électrique.
Un autre moyen est de réaliser l'auto-pilotage de la machine, c'est-à-dire de maintenir l'orthogonalité du flux magnétique rotorique par rapport au flux statorique[7], par exemple, en disposant sur son axe un capteur qui délivre une information de la position du rotor. Cette information est traitée par un convertisseur électronique qui fournit le courant statorique à la machine, en phase avec sa force contre-électromotrice[7].
Machine synchrone triphasée
Notations
- Toutes les grandeurs statoriques sont repérées soit par l'indice S soit par des indices en majuscules.
- Toutes les grandeurs rotoriques sont repérées soit par l'indice r soit par des indices en minuscules.
L'angle correspond au décalage angulaire entre le stator et le rotor.

- : Inductances propres d'un enroulement du stator ; d'un enroulement du rotor.
- : Inductance mutuelle entre deux enroulements du stator.
- : Valeur maximale de l'inductance mutuelle entre l'enroulement du rotor et un du stator (correspondant à une position pour laquelle θ = 0 ± 2π/3 ).



Hypothèse
La mise en équation n'est opérable que pour une machine à pôles lisses et dont le circuit magnétique est non saturé. Pour les autres machines, on apportera des correctifs permettant (avec plus ou moins d'exactitude) la prise en compte de leurs complexités.
Pour la suite on considère une machine pour laquelle :
- Son circuit magnétique est homogène (entrefer constant) et non saturé. De ce fait, les diverses inductances sont constantes (entrefer constant).
- Les courants des trois phases statoriques ont la même valeur efficace IS (la machine est assimilable à un récepteur triphasé parfaitement équilibré).
- Elle possède une seule paire de pôles (machine bipolaire). Les machines multipolaires se ramènent à une machine bipolaire au prix d'une transformation angulaire.

Au stator
On fixe l'origine des temps de manière à pouvoir écrire :

On en déduit les courants des deux autres phases du stator :


Avec : , et : pulsation des courants statoriques.


Au rotor
Au rotor, il n'y a que le courant continu Ir alimentant la bobine du rotor par l'intermédiaire d'un contact glissant sur deux bagues collectrices.
Il n'y a pas de glissement dans le cas d'un moteur synchrone, seulement un léger angle de déphasage.
Remarque
- Si le rotor est constitué d'un aimant, on considérera une bobine produisant un moment magnétique équivalent, c’est-à-dire traversée par un courant Ir que l'on détermine à l'aide de la méthode d'Hopkinson (application du théorème d'Ampère à un circuit magnétique).
- C’est-à-dire :
- la longueur de l'aimant
- respectivement la section moyenne de l'aimant et celle de la bobine


- On pose :


- En supposant que la bobine et l'aimant ont la même section, on obtient :

Flux à travers un enroulement statorique

Comme :
- , alors ,



On pose
- : inductance cyclique

L'expression du flux devient alors

l'expression du nombre complexe représentant le flux est

avec la représentation complexe d'un courant sinusoïdal « fictif » de valeur maximale et de pulsation .



En toute rigueur, cette substitution n'est valable qu'en régime établi : aucune modification de la charge ou de l'alimentation. C'est une condition nécessaire pour affirmer que la fréquence de rotation est exactement égale à la fréquence de l'alimentation.
Flux à travers un enroulement rotorique
Le flux traversant le rotor est le résultat de deux champ magnétiques :
- Le champ tournant, créé par les enroulements statoriques ;
- Le champ propre, créé par l'enroulement rotorique qui est constant (courant continu) mais qui tourne mécaniquement à la même vitesse que le précédent (machine synchrone). Avec la même limite qu'au paragraphe précédent : aucune modification de la charge ou de l'alimentation.
Tension aux bornes d'une phase du stator


On pose la tension à vide, c’est-à-dire la tension lorsque (tension créée par le seul champ rotorique)



Modélisation
Il existe plusieurs modèles équivalents de la machine synchrone suivant le nombre de paramètres dont on veut tenir compte.
Le modèle équivalent de Behn-Eschenburg
Le modèle de Behn Eschenburg ne s'applique que si la machine est non saturée et à pôles lisses. C'est le plus simple, il ne tient compte d'aucune saturation ni variation de l'entrefer. Il consiste à remplacer chaque phase de la machine par un ensemble de trois dipôles en série tels que la tension aux bornes de ce dipôle est égale à :


avec :
- et constants et indépendants du fonctionnement de la machine.
- uniquement proportionnelle à la fréquence de rotation et au courant d'excitation (courant rotorique).



Ce modèle convient bien aux gros turboalternateurs de forte puissance. On peut encore simplifier le modèle (et les calculs qui en découlent) en négligeant devant .
Le modèle équivalent de Potier

Ce modèle est plus complet que celui de Behn-Eschenburg. Il tient compte de la saturation en faisant varier le courant d'excitation en fonction du courant traversant les bobines du stator. Cette modification du courant excitateur fait varier la fcem.
Dans ce modèle on a :


Le modèle de Blondel à deux réluctances
Il permet de prendre en compte les variations angulaires de réluctance des machines synchrones à pôles saillants.
Stabilité statique
La stabilité en régime dynamique du réseau électrique est son aptitude à éviter tout régime oscillatoire divergent et à revenir à un état stable acceptable. Ceci inclut l’intervention éventuelle des protections et automatismes divers fonction des perturbations envisagées[8].

La puissance active délivrée par une machine synchrone à ses bornes est égale à :

Avec les notations du schéma ci-contre, c'est-à-dire E la tension électromotrice du générateur, son impédance, I le courant, la tension à ses bornes, le déphasage entre courant et tension et l'angle interne du générateur, autrement dit l'angle entre Ubornes et E.





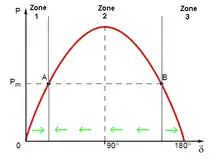
Ce générateur reçoit une puissance mécanique, typiquement d'une turbine, notée Pm. À l'équilibre, la puissance entrante, mécanique, est égale à la puissance sortante, électrique. On néglige ici les pertes[8]. Pour cet équilibre deux angles internes sont possibles (cf. image).
L'angle interne du générateur est régi par l'équation suivante[8] :

Où est la vitesse mécanique du rotor, J le moment d'inertie du rotor, p le nombre de pôles du générateur et Pe la puissance électrique. D'après cette équation si la puissance mécanique est supérieure à la puissance électrique consommée, alors l'angle interne augmente et inversement. On en déduit le diagramme ci-contre quant à la direction que prend l'angle interne en cas de petite variation autour du point d'équilibre.

Utilisations
Les moteurs synchrones sont fabriqués pour des vitesses de 1 800 (bipolaire) à 150 tr/min (48 pôles). Leur fonctionnement à vitesse absolument constante peut être une caractéristique importante dans certaines applications. Historiquement, leurs rendements supérieurs de 1 à 2,5 % à ceux des moteurs à courant continu, essentiellement dans les basses vitesses, les a privilégié pour les installations à fort taux de marche. Ils sont, par exemple, un choix évident pour entraîner de gros compresseurs alternatifs nécessitant des vitesses inférieures à 600 tr/min. Ils ne conviennent pas lorsque de fortes fluctuations de couple sont rencontrées. Une excitation en courant continu doit être fournie et les coûts des équipements de contrôle sont donc assez élevés. Par conséquent, les moteurs synchrones réservés aux puissances importante : 50 CV était un minimum à la fin du XXe siècle[10], et cette limite n'a cessé d'être repoussée face aux progrès des moteurs asynchrones.
Notes et références
- Les quadrants II ou IV du plan couple-vitesse (dit des « quatre quadrants »), figurant dans l'article « Quadrant (mathématiques) », avec la vitesse en ordonnée et le couple en abscisse. Comme toutes les machines électriques — qui sont par nature réversibles —, une machine synchrone passe sans discontinuité du fonctionnement « moteur » au fonctionnement « générateur » par simple inversion du signe du couple (charge entraînée ou entraînante, par exemple pendant les phases d'accélération ou de freinage) ou du signe de la vitesse (inversion du sens de rotation).
- BTS Électrotechnique (deuxième année) – Machine à courant continu – Quadrants de fonctionnement, site physique.vije.net, consulté le 8 août 2012.
- Robert Chauprade, Francis Milsant, Commande électronique des moteurs à courant alternatif – À l'usage de l'enseignement supérieur, écoles d'ingénieurs, facultés, CNAM, Paris, éd. Eyrolles, coll. « Ingénieurs EEA », 1980, 200 p., p. 86-92.
- Dans les quadrants I ou III du plan couple-vitesse défini dans la note ci-dessus.
- Description d'un moteur synchrone, sur le site sitelec.org, 7 septembre 2001, consulté le 28 mars 2012.
- Pavel 2013, p. 18-28.
- (en) P. Zimmermann, « Electronically Commutated D.C. Feed Drives for Machines Tools », Robert Bosch GmbH – Geschäftsbereich Industrieaurüstung, Erbach, Germany, p. 69-86, dans Proceding of PCI Motorcon, septembre 1982, p. 78-81.
- « Stabilité dynamique des réseaux électriques industriels » (consulté le ) [PDF].
- Diagramme inspiré du polycopié Grundlagen der Hochspannungs- und Energieübertragungstechnik de la TU Munich, p. 246.
- (en) Stanley M. Walas, Chemical process equipment : Selection and design, Howard Brenner, (ISBN 0-7506-9385-1, lire en ligne), p. 61
Bibliographie
- Mikhail Kostenko et Ludvik Piotrovski, Machines électriques, t. II, Machines à courant alternatif, Éditions de Moscou (MIR), 1969 ; 3e édition, 1979, 766 p.
- Ilarion Pavel, « L'invention du moteur synchrone par Nikola Tesla » [PDF], sur bibnum.education.fr, bibnum, .
Annexes
Articles connexes
Liens externes
- Contraintes mécaniques sur un rotor de turbo-alternateur sur le site sitelec.org
- Les Machines synchrones autopilotées - Préparation à l’agrégation de génie électrique, sur geea.org [PDF]
- Cours et Problèmes sur les machines électriques dont la machine synchrone, sur mach.elec.free.fr [PDF]
- Se souvenir de Nikola Tesla. L'inventeur des moteurs à courants alternatifs.
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique  Portail de l’énergie
Portail de l’énergie