Commande vectorielle
La commande vectorielle, aussi appelée commande à flux orienté (field-oriented control en anglais), est une méthode de commande des variateurs de vitesse électrique dans laquelle les courants statoriques triphasés d'un moteur électrique à courants alternatifs sont transformés en deux composantes orthogonales qui peuvent être considérées comme étant des vecteurs. Le premier vecteur permet le réglage du flux magnétique du moteur, tandis que le second règle le couple. Ils sont alors découplés et le fonctionnement devient alors similaire à celui d'un moteur à courant continu.
Pour les articles homonymes, voir FOC.
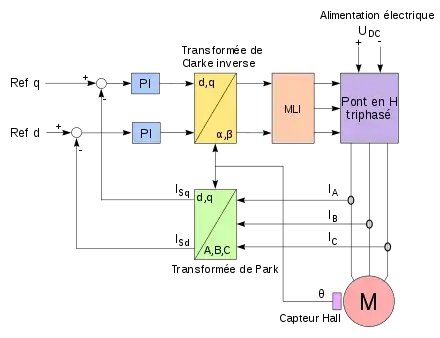
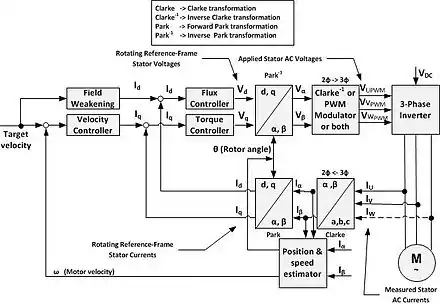
Le calculateur calcule alors à partir de la consigne de vitesse du moteur, le flux et le couple nécessaire, desquels on déduit les courants requis. Typiquement, un régulateur PI sert à maintenir le courant à la valeur demandée. La modulation de largeur d'impulsion (MLI) gère ensuite la commutation des transistors du variateur de vitesse électrique en fonction de la consigne de tension qui lui parvient. Un régulateur PI est placé après les consignes de courant afin de stabiliser l'ensemble.
La commande vectorielle est utilisée pour les machines synchrones et asynchrones, ainsi que pour les onduleurs en général, par exemple dans le cas des installations haute tension à courant continu. Elle a été conçue au départ pour des applications demandant de bonnes performances de la part du moteur : fonctionnement régulier sur toute la plage de vitesse, couple maximal à vitesse nulle, bonnes performances dynamiques combinés à des accélérations et décélérations rapide. La technique s'est toutefois démocratisée car elle permet également de réduire la taille du moteur utilisé dans un système (nouveaux moteur "brushless"), et donc son coût, ainsi que sa consommation électrique.
Histoire
K. Hasse, de l'université de Darmstadt, et F. Blaschke, de l'université technique de Brunswick, sont les pères de la commande vectorielle des moteurs à courant alternatif. Le premier propose la commande vectorielle indirecte en 1968, le second en proposant la commande vectorielle directe en 1971[1],[2],[3]. Werner Leonhard, de l'université technique de Brunswick pose les bases de la commande à flux orienté et contribue à rendre les moteurs à courant alternatifs compétitifs face aux moteurs à courant continu[4],[5].
Ce n'est cependant qu'avec la commercialisation des microprocesseurs dans le début des années 1980, que la commande des moteurs à courant alternatif se démocratise[6],[7]. Au départ, la commande à flux orienté est plus coûteuse, plus complexe et moins facile à maintenir que la commande des moteurs à courant continu. En effet, les premières demandaient encore de nombreux capteurs, amplificateurs et autres composants électroniques pour leur fonctionnement[8].
La transformée de Park est utilisée largement pour analyser et modéliser les machines synchrones et asynchrones. Elle est la clé de voute de la commande à flux orienté. La publication de Robert H. Park de 1929 a d'ailleurs été classée en 2000 comme étant la deuxième en termes d'influence au XXe siècle dans le domaine de l'électronique de puissance[9],. Son apport principal a été de permettre le remplacement des équations différentielles linéaires par des coefficients constants dans le temps[10].
Principe
Par construction, la machine à courant continu produit un champ magnétique statorique toujours perpendiculaire au rotor, la position de ce dernier agissant sur la manière dont le stator est alimenté. La commande vectorielle cherche à reproduire cette configuration dans le cas des machines alternatives, qui sont globalement plus compactes et plus simples à construire[11],[12].
Les machines à courant continu à excitation séparée, la vitesse de rotation du moteur et le couple sont découplés[12]. La première ne dépend que de la force contre-électromotrice , elle-même égale à une constante multipliée par le courant d'excitation, tandis que le second ne dépend que du courant :






Par rapport à une commande scalaire U/f, elle présente l'intérêt de permettre la commande séparée du couple et du flux, et donc de garder le couple dans une plage définie en toute circonstance[13].
Hypothèses d'application
Pour que la transformée de Park simplifie les équations et permettent l'utilisation de la commande à flux orienté, il faut que les hypothèses suivantes soient satisfaites [14]:
- le circuit magnétique de la machine n'est pas saturé, autrement dit le flux varie de manière linéaire avec le courant ;
- les pertes par courants de Foucault sont négligées ;
- Les courants, tensions et flux sont sinusoïdales[15] ;
- les réactances de fuites sont indépendantes de la position du rotor. Elles sont homogènes ;
- la machine doit être alimentée, comme on le fait dans la pratique, par un système de tensions triphasées sans neutre. Dans ce cas, la somme des trois courants est forcément nulle et la composante homopolaire est nulle.
Équations de base
La commande à flux orienté est intimement liée à la transformée de Park : c'en est une application concrète.
Pour une machine triphasée, au stator on peut écrire [16],[17] :

Où V est la tension, R la résistance, i le courant et le flux.


Où L est l'inductance propre, M est l'inductance mutuelle et est le flux au stator.


En effectuant une transformée de Park, on obtient un système de trois équations :

est l'angle de Park.

En multipliant par les courants, on obtient les puissances, dont la puissance active P :

Or mécaniquement, on sait que :

Où est le couple, la vitesse de rotation du moteur, p le nombre de paires de pôles du moteur. En simplifiant, on trouve:


L'utilisation de la transformée de Park lie le repère au rotor. Il est également possible de lier le repère au stator grâce à la transformée de Clarke. Dans ce cas, les deux composantes sont couplées. Il faut alors remédier à cet effet grâce à un courant de compensation[19].
Soit une machine synchrone avec un aimant permanent à pôles saillants :

En appliquant la transformée de Park, on obtient :

Avec , et



Ou :

On pose :

En reprenant l'expression générale du couple :

Dans le cas où la saillance est nulle, c'est-à-dire que le rotor est invariant par rotation, on obtient . Le couple devient alors .


En pratique , il faut donc maintenir égal à zéro pour obtenir le couple maximal.


Pour une machine asynchrone, on a un système d'équations pour le rotor et pour le stator. On note les grandeurs liées au stator avec un s et celles liées au rotor d'un r.


Dans le cas d'une machine asynchrone en cage d'écureuil, le rotor est en court-circuit. D'où :

On a également :

Où :


Et :

Après transformation de Park, le système prend la forme suivante :

Où : , , , On choisit la référence d’angle au rotor pour avoir .




Au rotor, les équations sont alors :

Avec la vitesse de rotation du rotor.

On remplace le courant rotorique par une relation renvoyant au stator. C'est-à-dire par et par :





On pose


Le flux est donc réglé par , tandis que pour , la pulsation est réglée par .



Au niveau du couple, on a :

En éliminant les courants rotoriques des expressions des flux statoriques, on a : et avec le coefficient de couplage défini par . On obtient alors :




Pour conclure, la commande vectorielle de la machine asynchrone fonctionne comme ceci :
- On fixe le flux à une valeur constante (nominale) à l’aide de
- On gère le couple grâce à
- la vitesse de rotation est fixée grâce à la mesure de et par l'estimation de grâce à la relation


Vue d'ensemble des stratégies de commande
Différentes stratégies de commande existent pour les variateurs de vitesse électrique. L'arbre suivant donne une vue d'ensemble (les abréviations sont en anglais) :
- Variateurs de vitesse électrique, avec ou sans capteurs
- Commande scalaire
- Commande U/f
- Commande vectorielle
- Commande directe du couple (DTC)
- Autocommande directe (DSC)
- Modulation des vecteurs spatiaux (SVC)
- Commande à flux orienté (FOC)
- FOC directe
- FOC indirecte
- Commande directe du couple (DTC)
- Commande scalaire
Commande à flux orienté directe, indirecte et sans capteur
Les méthodes de commande vectorielle, directe et indirecte, se différencient principalement par la méthode de détermination de l'angle de Park qui représente la phase du flux orientée dans le repère lié au stator.
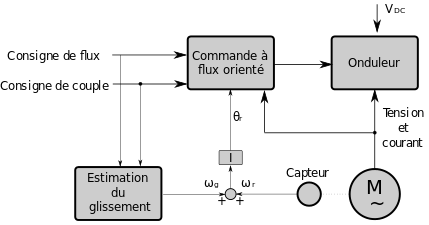
- Dans la commande indirecte, le courant statorique et la vitesse du rotor, , sont mesurés. La première mesure donne la pulsation statorique , la seconde l'angle de Park. Grâce à la connaissance de et , on peut calculer le glissement. Il est nécessaire de connaître de façon précise la position du rotor pour pouvoir déterminer de la même façon la position du flux rotorique. L’estimation du flux rotorique par rapport au rotor se fait en boucle ouverte. Elle sera donc d’autant plus précise que les paramètres utilisés pour son calcul correspondront aux paramètres réels de la machine.
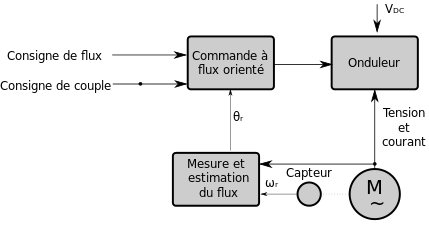
- Dans la commande directe, l'amplitude des flux et l'angle de Park sont déterminés par le calcul directement à partir de la mesure des tensions et des courants[20].

La méthode indirecte est plus courante car elle permet de se passer d'un calculateur ou capteur de flux[19]. De plus, elle fonctionne correctement sur toute la plage de vitesse[21],[22],[23].
La commande sans capteur présente des avantages en termes de coûts et de fiabilité. Elle déduit la vitesse de rotation du rotor et l'amplitude du flux de la mesure des tensions et courants statoriques. Elle requiert pour cela un estimateur en boucle ouverte ou un observateur en boucle fermée[15].
Le défaut principal de la boucle ouverte est que le couple maximal ne peut être délivré pour une vitesse trop faible, typiquement 0,8 Hz, alors que pour la boucle fermée, celui-ci peut être délivré à l'arrêt[24].


Modulation à largeur d'amplitude : en source de courant ou de tension
La commande à flux orienté utilise généralement un onduleur à modulation de largeur d'impulsion qui gère donc la commutation des transistors du variateur de vitesse électrique en fonction de la consigne de tension ou de courant qui lui parvient. En effet, l'onduleur peut fonctionner soit en source de tension soit en source de courant. La première a plusieurs défauts : elle requiert un circuit extérieur pour la protection contre les courts-circuits, la montée en tension () est très brutale, un court-circuit interne peut se produire en cas de tension transitoire à cause d'une mauvaise injection de courant dans la gâchette de l'IGBT[19].

Dans une commande à flux orientée, la fréquence de commutation est généralement constante.
Régulation
Des régulateurs PI classiques sont utilisés pour l'asservissement des commandes à flux orientés[28],[27]. Des filtres passe-bas sont parfois ajoutés, afin d'éviter que les oscillations du courant causées par la commutation des transistors ne soient amplifiées par le régulateur et perturbent la commande. Cet ajout détériore toutefois les performances du système. Dans le cas des variateurs de vitesse à hautes performances, comme les servo-drive, une fréquence de commutation très élevée (typiquement 10 kHz) est requise pour pouvoir se passer de filtres.
Si un régulateur PI est utilisé, la réponse à un échelon présente un dépassement.
Avantages et inconvénients de la commande vectorielle
La commande vectorielle a les avantages suivants [29]:
- Elle est basée sur le modèle transitoire (traiter les régimes transitoires ce que ne permettait pas de faire le variateur classique)
- Elle est précise et rapide.
- Il y a un contrôle du couple à l’arrêt.
- Le contrôle des grandeurs se fait en amplitude et en phase
Elle a également certains inconvénients [29]:
- Coûteuse (encodeur incrémental ou estimateur de vitesse, DSP .). Le processeur doit être capable de calculer l'algorithme environ toutes les millisecondes.
- Faible robustesse aux variations paramétriques et en particulier à celles de la constante de temps rotorique.
- Nécessité d’un modulateur pour la commande rapprochée de l’onduleur qui provoque des retards, surtout à basse fréquence de modulation (grande puissance). Ces retards sont responsables d’une augmentation du temps de réponse en couple, ce qui pénalise les variateurs utilisés en traction.
- Présence de transformations de coordonnées dépendant d’un angle θs estimé.
- La vitesse de rotation intervient explicitement dans l’algorithme de commande. Quand on ne mesure pas cette vitesse (variateur sans capteur de vitesse), les erreurs sur l’estimée de cette vitesse dégradent les performances du variateur.
- De mauvais paramètres entraînent une erreur sur le couple.
Par rapport à la commande directe du couple, l'algorithme de la commande vectorielle doit être calculé moins fréquemment. Le capteur de courant ne doit pas être aussi bon dans le cas de la commande vectorielle que pour une commande directe du couple. La première est donc globalement moins coûteuse que la seconde. Le tableau suivant résume les principales différences entre ces deux méthodes [30],[31],[32]:
| Propriété | Commande directe du couple | Commande vectorielle |
|---|---|---|
| Réponse dynamique à un échelon de couple | Très rapide | Rapide |
| Système de coordonnée | alpha, beta (statorique) | d, q (rotorique) |
| Comportement en basse vitesse (< 5 % du nominal) | Nécessité d'un capteur de vitesse pour freinage continu | Bon avec capteur de position ou de vitesse |
| Variables commandées | Couple et flux statorique | flux rotorique, courant rotorique iq pour la commande du couple, courant rotorique id pour la commande du flux |
| Oscillation des différentes variables | Faible (si le capteur de courant est de qualité) | Faible |
| Paramètre ayant le plus d'influence (en absence de capteur) | Résistance statorique | Inductances d et q inductances, résistance rotorique |
| Paramètre ayant le plus d'influence (en boucle fermée) | Inductances d, q, flux (à faible vitesse) | Inductances d, q, résistance rotorique |
| Mesure de la position du rotor | Non requise | Requise (capteur ou estimation) |
| Commande du courant | Non requise | Requise |
| Modulation MLI | Non requise | Requise |
| Changement de coordonnées | Non requise | Requise |
| Fréquence de commutation | Variable | Constante |
| Pertes par commutation | Très faible (si le capteur de courant est de qualité) | Faible |
| Bruit | Grésillement sur un large spectre | Bruit à fréquence constante, sifflement |
| Régulation | vitesse (régulateur PID) | vitesse (régulateur PID), flux rotorique (PI), courant id et iq (PI) |
| Complexité de l'algorithme | Faible | Grande |
| Intervalle maximum entre deux calculs successifs de l'algorithme | 10-30 microsecondes | 100-500 microsecondes |
Par rapport à la commande scalaire, la commande à flux orienté permet également de réduire la taille du moteur, et donc son coût, ainsi que sa consommation électrique[25],[33]. À terme, le faible coût des processeurs puissants doit permettre à cette technologie de remplacer totalement la commande scalaire, dite commande U/f[34].
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Vector control (motor) » (voir la liste des auteurs).
- (en) Masao et al. Yano, « History of Power Electronics for Motor Drives in Japan » (consulté le ), p. 6, Fig 13
- (en) Md Abdur Rafiq, « Fast Speed Response Field-Orientation Control of Induction Motor Drive with Adaptive Neural Integator », Journal of Electrical and Electronics Engineering, University of Istanbul, vol. 6, no 2, , p. 229
- (de) Felix Blaschke, Das Verfahren der Feldorientierung zur Regelung der Drehfeldmaschine, TU Braunschweig,
- (en) Bill Drury, The Control Techniques Drives and Controls Handbook, Stevenage, Herts, UK, Institution of Engineering and Technology, (ISBN 978-1-84919-101-2)
- (en) Bimal K. Bose, Power Electronics and Motor Drives : Advances and Trends, Amsterdam, Academic, , 936 p. (ISBN 978-0-12-088405-6), p. 22
- (en) « The Development of Vector Control Drive » [archive du ] (consulté le )
- Bose 2006, p. 605
- (en) R. Gabriel, W. Leonhard et C.J. Nordby, « Field Oriented Control of Standard AC Motors Using Microprocessors », Trans. on Industry Applications, vol. IA-16, no 2, , p. 188 (DOI 10.1109/tia.1980.4503770)
- (en) Robert Park, « Two Reaction Theory of Synchronous Machines », Trans. of the AIEE, vol. 48, , p. 716–730 (DOI 10.1109/t-aiee.1929.5055275)
- (en) G. T. Heydt,, S. S. Venkata et N. Balijepalli, « High Impact Papers in Power Engineering, 1900-1999 », North American Power Symposium (NAPS) 2000, , P-1 to P-7
- Aid et Aina 2013, p. 1
- Bose 2006, p. 429
- « Introduction à la commande vectorielle des machines asynchrones » (consulté le )
- Aid et Aina 2013, p. 8
- (en) J. Holtz, « Sensorless control of induction motor drives », Proceedings of the IEEE, vol. 90, no 8, , p. 1359–1394 (DOI 10.1109/jproc.2002.800726, lire en ligne, consulté le )
- « Systèmes mécatroniques asservis 3. Actionneurs : Commande des machines triphasées » [archive du ] (consulté le )
- Houssem Aid et Wafaa Aina, Synthèse de lois de commande non-linéaires pour un entrainement électrique à vitesse variable basé sur un moteur synchrone à aimants permanents, Université Abou Bekr Belkaïd Tlemcen, (lire en ligne), p. 16
- (en) « AVR32723: Sensor Field Oriented Control for Brushless DC motors with AT32UC3B0256 », sur Atmel (consulté le )
- (en) I. Gerald Christopher Raj, P. Renuga et M. Arul Prasanna, « Improved Indirect Rotor Flux Oriented Control of PWM inverter fed Induction Motor Drives », ACEEE Int. J. on Electrical and Power Engineering, vol. 01, no 03, (lire en ligne, consulté le )
- A. Lokriti et Y. Zidani, Comparaison des performances de régulateurs PI et IP appliqués pour la commande vectorielle à flux rotorique orienté d'une machine asynchrone (lire en ligne)
- Bose 2006, p. 419, 423-425, 474
- Bose (2006), p. 423-425
- Gan Dong, « Sensorless and Efficiency Optimized Induction Machine Control with Associated Converter PWM Modulation Schemes », Tennessee Technological University, (consulté le ), p. 10
- (en) Bill Drury, The Control Techniques Drives and Controls Handbook, Stevenage, Herts, UK, Institution of Engineering and Technology, (ISBN 978-1-84919-101-2), p. 209
- (en) « 568000 DSP Manual, 3-Phase AC Induction Vector Control Drive with Single Shunt Current Sensing », sur Freescale (consulté le )
- Mircea Popescu, Induction Motor Modelling for Vector Control Purposes, Espoo, Helsinki University of Technology, , 144 p. (ISBN 951-22-5219-8, lire en ligne), p. 13–14
- (en) Jorge Zambada, « Field-oriented control for motors » [archive du ], sur MachineDesign.com, (consulté le )
- Aid et Aina 2013, p. 41
- Aid et Aina 2013, p. 39
- (en) X.T. Garcia, B. Zigmund, A. Terlizzi, R. Pavlanin et L. Salvatore, « Comparison Between FOC and DTC strategies for Permanent Magnet », Advances in Electrical and Electronic Engineering, vol. 5, nos 1 -2, , p. Vol 5, No 1–2 (2006): March - June (lire en ligne)
- (en) M. S. Merzoug et F. Naceri, « Comparison of Field Oriented Control and Direct Torque Control for PMSM », World Academy of Science, Engineering and Technology 21 2008, vol. Merzoug, no 21, , p. 209–304 (lire en ligne)
- (en) M. P. Kazmierkowski, L. Franquelo, J. Rodriguetz, M. Perez et J. Leon, « High Performance Motor Drives », IEEE Industrial Electronics Magazine Sept 2011, vol. 5, no 3, , p. 6–26 (DOI 10.1109/mie.2011.942173, lire en ligne)
- Kedar Godbole, « Field oriented control reduces motor size, cost and power consumption in industrial applications », Texas Instruments, (consulté le )
- Bimal K. Bose, « The Past, Present, and Future of Power Electronics », Industrial Electronics Magazine, IEEE, vol. 3, no 2, , p. 11 (DOI 10.1109/MIE.2009.932709)
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique