Applications du magnétisme
Le magnétisme est un phénomène qui possède de nombreuses applications, y compris dans la vie courante. Cet article a pour vocation d'établir une liste explicative de ces dernières, certes non exhaustive, mais évoquant les principales et les plus communes. Elles sont ci-dessous regroupées en catégories détaillées dans le sommaire.
Applications au quotidien
Les plaques à induction
Des bobines alimentées en courant alternatif génèrent un champ magnétique oscillant sur le fond ferromagnétique des casseroles. Puisque toute variation temporelle du flux magnétique traversant un matériau ferromagnétique y induit un courant de Foucault, il s’établit un courant dans le fond de la casserole. Cette mise en mouvement des électrons par force de Lorentz entraine une dissipation d’énergie par effet Joule, et donc chauffer la casserole.
La recharge par induction des batteries : brosses à dents, téléphones…
Suivant le même principe, la bobine située sur le socle de recharge induit des courants de Foucault, cette fois-ci dans une seconde bobine située proche de la batterie de l’appareil à charger. Ces courants induits peuvent ainsi alimenter la batterie et la recharger. Pour obtenir un maximum de rendement, il est nécessaire d’aligner au mieux les bobines.
Au niveau industriel, la norme Qi est la plus répandue avec plus de 200 entreprises qui l’utilisent. On peut citer notamment : Belkin, Freescale, Haier, HTC, IKEA, LG, Microsoft, Motorola, Nokia, Panasonic, Samsung, Sony, TDK, Texas Instruments. À la date du , la puissance maximale[1] capable d’être transmise à un téléphone compatible est de 15 W. Le rendement entre le courant secteur et la batterie[2] est d’environ 52% contre 65% en filaire.
Applications de l’électroaimant
Un électroaimant est un aimant pour lequel le champ magnétique est produit à partir d’un courant électrique. La manière la plus simple de réaliser un électroaimant est d’enrouler un fil conducteur autour d’un matériau ferromagnétique ou ferrimagnétique et l’alimenter. Ainsi le champ magnétique créé par le courant circulant dans le bobinage est porté par le cœur magnétique.
De nombreuses applications utilisent des électroaimants : séparateurs magnétiques, déplacements de matériaux ferreux dans l’industrie du recyclage ou de la maintenance ferroviaire, etc. Un exemple simple : le loquet de porte à électro-aimant.
Loquet de porte à électro-aimant :
Cette application peut être schématisée comme ci-contre :
Sur la partie fixe de la porte, il y a l’électroaimant et sur la porte, un matériau ferromagnétique ou ferrimagnétique permettant de fermer le circuit.
La force exercée par le champ magnétique est : ,
avec

- : l'induction magnétique générée par le système
- : la section du cœur magnétique
- : la perméabilité magnétique du cœur magnétique
- avec la perméabilité du vide





- Avantages :
- - Facilité d’installation par rapport aux systèmes mécaniques haute sécurité.
- - Rapidité de verrouillage / déverrouillage : Verrouillage instantané lorsque l’alimentation est coupée.
- Inconvénients :
- - Besoin constant d’une source d’alimentation.
- - Problème de sécurité puisque la porte restera fermée s’il y a une coupure de courant.
Les disques durs
Le stockage de l’information se fait en utilisant l’orientation de domaines magnétiques d’un film fin ferromagnétique déposé sur un disque. La taille de ces derniers est de l’ordre de 20nm. Sur un même bras mécanique sont disposées la tête de lecture et la tête d’écriture. Cela permet à ces dernières de se positionner à n’importe quel endroit du disque en rotation pour qu’elles réalisent leurs actions.
La tête de lecture la plus basique est une tête inductive constituée d’un électroaimant. Lorsqu’une zone magnétique passe à proximité de l’électroaimant, un courant électrique se forme dans le bobinage. Suivant la succession des régions magnétiques, le champ créé est plus ou moins intense, tout comme le courant induit (voir schéma ci-contre).

Les têtes de lecture[3] les plus récentes sont constituées de capteurs GMR et TMR, exploitant respectivement les effets de magnétorésistance géante et de magnétorésistance à effet tunnel (voir ci-dessous le paragraphe « capteurs magnétorésistifs »). La variation du champ magnétique dans le disque influe sur la résistance électrique du matériau composant la tête de lecture. Ces têtes de lectures ont l’avantage, par rapport aux têtes inductives, d’être plus petites. Néanmoins, il est nécessaire d’effectuer un blindage magnétique autour du matériau magnétorésistif afin que seules les variations de champ magnétique du disque l’influencent. Avec cette méthode, la résolution entre deux pistes est limitée par la taille de l’élément magnétorésistif dans la tête de lecture.

La tête d’écriture est le plus souvent inductive. Constituée d’un électroaimant, cette dernière peut, suivant le sens du courant dans la bobine, appliquer aux différents domaines du disque des champs magnétiques opposés. L'objectif étant d’appliquer un champ magnétique assez fort pour dépasser l’aimantation rémanente du matériau ferromagnétique et ainsi permettre au domaine magnétique de garder son aimantation en absence de champ magnétique.
Des recherches sont effectuées depuis les années 90 sur des molécules ayant leur propre aimantation : les aimants moléculaires. A basse température, ces molécules ont des propriétés similaires à celles des aimants et peuvent ainsi être considérées comme des particules magnétiques de très petite taille, idéales pour mettre en place de meilleurs dispositifs de stockage d'informations.
La bande magnétique


De par la robustesse de son stockage, son faible coût et sa grande capacité de stockage, la bande magnétique est idéale pour archiver des données[4]. D'autant plus que ce procédé de stockage présente un gros avantage dans l'archivage longue durée : il n’est pas sujet aux pannes mécaniques que peuvent rencontrer les disques durs.
On peut la trouver sous différentes formes : bandes magnétiques en bobine libre (bandes maintenues par le seul noyau), bandes en cassette, cartouches de bandes magnétiques.
Lorsqu'il est question de stockage longue durée, il faut s'assurer de la robustesse du procédé. Le facteur limitant la durée de vie de la bande magnétique est l’altération dans le temps des particules magnétiques.
Cette altération dépend fortement de la température d'entreposage.
La stabilité thermique des particules magnétiques est estimée par la formule suivante :
avec

: la constante de l’isotropie de la particule

: le volume moyen de la particule

: la constante de Boltzmann

: la température en kelvins

Si ce ratio est supérieur à 65, la stabilité thermique peut faire espérer une durée de vie de 30 ans. Les disques durs magnétiques ont un coefficient compris entre 45 et 60 alors que celui des bandes magnétiques ont un ratio bien supérieur à 100.
IBM, Fujifilm et Oracle ont annoncé une durée de vie de 30 ans pour une bande magnétique à base de ferrite de Barium.
Applications médicales
Imagerie et caractérisation médicale
- IRM : Imagerie par résonance magnétique
L'imagerie par résonance magnétique nucléaire (IRM) est l'application, la plus connue du grand public, de la résonance magnétique nucléaire (RMN) en imagerie médicale. Elle permet d'avoir une vue 2D ou 3D d'une partie du corps, notamment du cerveau.

La RMN est associée à une propriété de certains atomes lorsqu'ils sont placés dans un champ magnétique. Cet effet est essentiellement utilisé comme une méthode spectroscopique d’analyse de la matière. La RMN met en jeu des rayonnements électromagnétiques de très faible énergie, elle permet ainsi un examen extrêmement détaillé et non destructif pour l’échantillon.
Les atomes dont le noyau présente un nombre impair de protons et de neutrons, possèdent un spin nucléaire, c'est-à-dire un nombre quantique de spin non nul. Placés sous un champ magnétique, ces isotopes atomiques peuvent avoir deux états distincts. En appliquant un rayonnement adapté, un photon pulsé va faire osciller le noyau d’un état d’énergie à l’autre : on parle de résonance. En retournant à son niveau d’équilibre, le noyau émet un photon. Ce rayonnement, en plus d'indiquer la présence du noyau, peut également donner des informations sur l'environnement de la molécule. Dans le cas de l'IRM, on utilise l'atome d'hydrogène présent dans l'eau () des cellules organiques.

- MEG : Magnétoencéphalographie
De la même manière qu’un électroencéphalogramme, le magnétoencéphalogramme mesure le champ magnétique induit par l’activité électrique des neurones du cerveau. Ces champs magnétiques extrêmement faibles sont mesurés à l’aide de magnétomètre SQUID, un appareil de mesure doté d’une boucle supraconductrice, refroidie à l’hélium liquide.
La MEG permet de suivre l’évolution au cours du temps d’un message nerveux. Elle est utilisée également pour le diagnostic précoce des maladies neurodégénératives (Alzheimer et Parkinson) ou pour spécifier des cas d’épilepsies.
- RPE : Résonance paramagnétique électronique
La résonance paramagnétique électronique est un phénomène analogue à la résonance magnétique nucléaire et concerne les électrons non appariés. Cet effet est également utilisé comme méthode spectroscopique pour mettre en évidence la présence de ces électrons. Il est possible, par exemple, d’en déduire la structure d’une molécule. Cette technique est couramment utilisée comme moyen d’analyse d’échantillons biologiques.
Nanoparticules magnétiques et ferrofluides

L’autre champ d’application du magnétisme dans le domaine médical est celui de l’utilisation des nanoparticules magnétiques dans le cadre thérapeutique. En constant développement, de telles particules présentent l’avantage de pouvoir être contrôlées à distance ou d’émettre une grande quantité d'énergie thermique sous l’application d’un champ magnétique. On appelle ferrofluide, un fluide magnétique stable composé de nanoparticules ferromagnétiques de diamètre compris entre 5 et 12 nm et dispersées dans une phase liquide (aqueuse ou organique).
Le développement de la bio-nanotechnologie[5] permet l’utilisation de nanoparticules magnétiques comme supports de biomolécules pour différentes applications n vitro, elles sont utilisées comme supports solides pour l’extraction, la purification, la concentration et le transport de biomolécules ou tout simplement comme outil de détection; in vivo, comme des agents de contraste pour des diagnostics, le traitement de cancer et la libération de molécules actives (thérapeutique).
Le traitement de tumeurs cancéreuses par hyperthermie magnétique est l’application la plus ambitieuse. L'injection d'un ferrofluide dans des cellules cancéreuses entraine l’échauffement de ces dernières sous l’action d’un champ magnétique, ce qui permet de les détruire.
Applications liées au transport
Train à sustentation magnétique
Depuis le tout premier chemin de fer, peu de choses ont changé en termes de concepts techniques de base : les trains sont toujours soutenus, guidés et propulsés par les roues. Mais un nouveau système de trains a fait son apparition : ce sont les trains à lévitation magnétique, qui sont soutenus, propulsés et guidés par la seule force électromagnétique. Ce nouveau concept présente de nombreux avantages grâce à sa technologie révolutionnaire dite de " non-contact ".
Un train à sustentation magnétique est un train monorail utilisant les forces magnétiques pour se déplacer. Deux principaux types de trains à sustentation existent.

- Le type à sustentation électrodynamique (ou EDS) utilisent des aimants supraconducteurs. Le projet le plus abouti est le Maglev japonais. Des bobines supraconductrices sont placées dans le train et des électroaimants le long de la voie. Ces bobines en 8 sont de sens contraire, donc elles se repoussent. Le guidage est réalisé par les mêmes bobines que celles qui assurent la lévitation. Le courant électrique traversant les bobines est créé par le passage des aimants supraconducteurs, en accord avec le principe d'induction électromagnétique. Ainsi la partie inférieure du 8 de la bobine assure la lévitation par répulsion et la partie supérieure du 8 le guidage, aussi par répulsion.Lorsque le train se déplace, un courant est induit dans la voie. La force de Laplace résultante fait léviter le train à une dizaine de centimètres au-dessus du sol. Le déplacement du train engendre une traînée électromagnétique très importante, d'où une consommation énergétique élevée.
- Le type à sustentation électromagnétique (ou EMS), utilisant des électroaimants classiques. La traînée électromagnétique est ici très faible, voire nulle. Le Transrapid[6] allemand en est le principal exemple. Le rail « porteur » contient des aimants ou des électroaimants. L'interaction entre les aimants à bord du train et des aimants disposés le long de la voie crée une force magnétique induite qui compense la gravité et permet la lévitation. Ces aimants attirent le train vers le haut et assurent un écart suffisant entre le rail et le train ce qui empêche toute perte due à la friction. Par ailleurs, aux vitesses élevées, c'est la résistance aérodynamique qui représente de loin la principale résistance à l'avancement. Le guidage du train se fait parallèlement à la voie par des forces électromagnétiques, sans contact. Les bobines de guidage de la voie sont situées sur les côtés de celles-ci, en face des bobines de guidage du train.
Freinage magnétique

Le frein magnétique est utilisé comme frein supplémentaire dans le domaine ferroviaire et autoroutier en utilisant le principe du courant de Foucault.
Dans le domaine autoroutier, ces freins sont utilisés sur les camions et autocars et fonctionnent comme des ralentisseurs, plutôt que des freins, par le principe du courant de Foucault généré dans une masse métallique conductrice. Des disques solidaires des roues sont encadrés par des électroaimants. Sous tension, ces électroaimants vont induire un courant dans les disques, générant ainsi un couple de freinage.
Il est utilisé dans le ferroviaire en complément du freinage pneumatique ou électrique pour accroitre l'effort de freinage. Ce système n'est mis en fonction que pour les freinages d'urgence, quand il est nécessaire de freiner sur la distance la plus courte possible. Constitués d'un ensemble vérins + patins fixé sur le châssis du bogie, les freins entrent en action par la descente des patins contre les rails grâce aux vérins. Afin de plaquer les patins sur les rails, un champ magnétique est créé.
 Frein magnétique appliqué
Frein magnétique appliqué Frein magnétique en position normale
Frein magnétique en position normale
Capteurs magnétiques
Les capteurs magnétiques sont implantés dans de très nombreux objets du quotidien. Par exemple, une voiture récente peut en contenir plus d’une trentaine. Ceux-ci sont aussi présents dans les réfrigérateurs, les machines à laver, et même certaines chaussures de sport. En effet, des chercheurs travaillent actuellement sur la réalisation d'une semelle capable de s’adapter constamment [7]. Il existe environ quinze types de capteurs. Parmi eux, certains sont des capteurs de champ (capteurs mesurant directement la valeur du champ magnétique selon un ou plusieurs axes) et d’autres sont des capteurs de flux (capteurs mesurant l’intégrale du champ passant à travers une surface)
Capteurs de champ
- Boussole, mesure de champ terrestre :

Il existe deux types de boussoles, mécaniques (la première créée mais de moins en moins utilisée) et électroniques (de plus en plus utilisées). La boussole mécanique est basée sur l’orientation d’une aiguille dans le champ magnétique terrestre par une mesure de champ magnétique. En revanche, la boussole électronique est basée elle sur le positionnement des références spatiales satellitaires[8]. De manière générale, la boussole électronique est associée à un GPS, ce qui permet d’orienter les cartes du GPS dans la bonne direction. Le contrôle du positionnement dans l’espace (avec le champ magnétique terrestre comme axe de référence) se développe aussi pour d’autres applications telles que les jeux, les enregistrements de mouvement ainsi que les applications robotiques. Une boussole électronique contient plusieurs capteurs magnétiques axiaux (sensible à une direction du champ magnétique) couplés à des mesures d’inclinaison et parfois à des accéléromètres. Les principales technologies utilisées pour ces boussoles sont l’effet Hall, les microfluxgates ainsi que l’effet d’impédance magnétique géante (GMI) qui utilise la très grande variation d’absorption radiofréquence de certains matériaux magnétiques en fonction de leur configuration magnétique statique.
- Capteur de position et d’angle :
 Représentation schématique d'un capteur de position
Représentation schématique d'un capteur de position
Ce type de capteur utilise un système de codage de position ou d’angle. Le principe est d’avoir un cylindre ou une roue (comme présentée sur le schéma ci-dessous) présentant des pôles magnétiques alternés dont le passage va être détecté par un capteur magnétique. Lors du mouvement, le passage à zéro, qui consiste au renversement de la composante du champ magnétique suivant une direction donnée, permet de localiser la position physique du cran. De ce fait, la résolution de ce capteur dépend de deux paramètres : le nombre de crans (pour une roue crantée) et le nombre de capteurs magnétiques.
Une sensibilité en champ faible meilleure que celle des capteurs à effet Hall peut être obtenue à l’aide d’une magnétorésistance géante (cf capteur magnétorésistif)
Ce type de capteur est avant tout utilisé dans l’automobile, l’équipement de mesure de vitesse, la mesure d’angle de rotation de moteurs ou d’éléments tournants.
- Capteur de courant :
La mesure de courant sans contact est également une application des capteurs magnétiques. Le principe est simple, un courant circulant dans un conducteur produit un champ magnétique orthoradial, le champ d’Oersted, qui peut être détecté sans contact ce qui permet d’assurer une isolation entre la mesure et le circuit. Ce principe est aussi utilisé dans des compteurs électriques ou dans des systèmes industriels nécessitant une isolation galvanique. Par exemple, la mesure de la consommation électrique des domiciles est réalisée par des capteurs de courant sans contacts. Dans ce cas, les courants à mesurer sont forts et la linéarité est très importante. C’est pour cette raison que l’on utilise des capteurs à effet Hall relativement optimisés.
- Capteur magnétorésistif :
Les capteurs magnétorésistifs sont des capteurs de champ : ils mesurent directement la valeur du champ magnétique selon un ou plusieurs axes. Ce type de capteurs peut se décomposer en deux sous parties, les capteurs type AMR (Anisotropic Magnetoresistance) et les capteurs type GMR (Giant Magnetoresistance)[9].
Les capteurs à magnétorésistance anisotrope (AMR) :
Ce type de capteurs est le plus souvent utilisé, surtout dans les applications telles que les téléphones, les PCs ou bien les détections d’ouverture/fermeture de porte.

Le principe d’un capteur AMR se base sur la variation de résistance électrique d’un matériau ferromagnétique en fonction de la direction du champ magnétique lui étant appliqué, comme schématisé sur le schéma ci-dessus. En ce qui concerne leur sensibilité, elle ne dépend pas de leur taille et est de l’ordre de 1 mV/Gauss. De plus leur plage d’utilisation est limitée à +/- 25 Gauss. De plus, la variation de résistance (aussi appelée l’amplitude de magnétorésistance) en sortie est relativement faible, de l’ordre de 3%. Il faudra donc que ces matériaux soient traversés par un courant suffisamment important pour pouvoir obtenir un signal exploitable en sortie.
Les capteurs à magnétorésistance géante (GMR) :
Les capteurs à magnétorésistance géante sont issus de l’électronique de spin. Une de leurs principales applications est de remplacer les bobines inductives car ils peuvent être miniaturisés à des tailles de quelques dizaines de microns. De ce fait, il est possible d’intégrer ces GMR dans les systèmes CMOS contenant une électronique de traitement de signal. En revanche, à très hautes fréquences, les bobines inductives restent les plus performantes car elles ont une sensibilité proportionnelle à la dérivée du flux qui croit avec la fréquence. L’effet GMR consiste à empiler des couches ferromagnétiques et non magnétiques de quelques nanomètres d’épaisseur. Ceci lui permet de posséder des performances des plus remarquables. En effet, lorsqu’on applique un champ magnétique, leur résistance électrique diminue de l’ordre de 10% à 20%.
- Capteur magnétosonique :
Le capteur magnétosonique[10] constitue un capteur de déplacement linéaire absolu sans contacts mécaniques qui est basé sur le principe de la magnétostriction. Ce type de capteur nécessite la création et la réception d’une onde élastique. Pour cela, deux effets sont mis en jeu :
- Génération de l’onde élastique : l’effet Wiedemann qui consiste en la torsion d’un cylindre ferromagnétique lorsqu’il est soumis simultanément à un champ magnétique longitudinal et à un champ circulaire transversal.
- Réception de l’onde élastique : l’effet Villari , une contrainte mécanique produit dans un corps ferromagnétique une variation de l’aimantation et de perméabilité.
Ce capteur est constitué de différents éléments :
- - un tube en alliage ferromagnétique autour duquel coulisse un aimant toroïdal lié au mobile dont la position est l’objet de la mesure ;
- - un fil conducteur placé dans l’axe du tube et relié à un générateur d’impulsions électriques ;
- - un récepteur comportant une inductance dont le noyau est couplé mécaniquement au tube.
Une impulsion électrique est appliquée au conducteur intérieur : elle se propage dans le tube à la vitesse de la lumière et le champ magnétique associé a ses lignes de forces circulaires, centrées sur l’axe. Au passage de cette onde au niveau de l’aimant, la combinaison de leurs deux champs magnétiques (celui de l’aimant et celui de l’onde) provoque l’effet Wiedemann. L’onde continue donc de se propager et en arrivant sur le noyau du récepteur provoque l’effet Villari. De ce fait, on a pratiquement :

avec :
- tp, l’intervalle de temps séparant l’émission de la réception de l’onde élastique
- l, la distance entre le récepteur et l’aimant lié au mobile
- V, la vitesse de propagation de l’onde (V<<c)
Ce temps peut par exemple être compté par un compteur d’impulsion.
Capteurs de flux
- Les SQUIDs :

Ces types de capteurs sont des dispositifs supraconducteurs basés sur l’effet Josephson. Les SQUIDs[11] sont composés d’un anneau supraconducteur dans lequel on a inséré un ou deux petites tranches isolantes. Avec une structure de ce type ainsi qu’une quantification du flux dans l’anneau rendent ultra-sensible à tout champ magnétique ce type de capteur.
Les SQUIDs sont les capteurs les plus performants pour mesurer les champs magnétiques, y compris de très faibles. Par exemple, l’activité d’un cerveau humain en temps réel peut être mesurée par ce type de capteur. On peut donc ainsi réaliser de très fines études magnétoencéphalographiques. Ces capteurs ne sont pas utilisés qu’en médecine, ils sont aussi utilisés dans d’autres disciplines où la présence de magnétomètres très performants sont indispensables : physique, archéologie, géologie...
- Capteurs de champ ultrasensibles :
Ces capteurs sont communément appelés capteurs mixtes, permettant d’atteindre un niveau de sensibilité de l’ordre du fT/√Hz, comparable aux meilleurs capteurs magnétiques existants, les SQUIDs (Superconducting Quantum Interference Device).
Ce sont des capteurs basés sur l’association d’une boucle superconductrice, agissant comme un transformateur flux-champ, et de capteurs GRMs qui permettent de mesurer un champ local amplifié. La figure ci-dessous montre une vue de ce type de capteur avec deux GRMs montées en demi-pont. Dans la boucle superconductrice (en rouge sur la figure), un champ faible sur une large surface se transforme en un champ intense sur une toute petite surface. À haute température critique, des gains de l’ordre de 1000 peuvent être obtenus dans ce cas-ci.
En quelques chiffres, ces types de capteurs à basse température peuvent obtenir des détectivités de 1 fT/√Hz à 4K et 5 fT/√Hz à 77K au-delà de 10 kHz. En revanche, à faible fréquence, un bruit de résistance réduit la sensibilité à 100 fT/√Hz à 1 Hz.
Une des principales applications de ces capteurs est la magnéto-encephalographie (MEG) permettant de remonter à l’imagerie des courants neuronaux circulant dans le cerveau à travers le champ rayonné par ces courants.
- Fluxgates :
Les fluxgates sont des magnétomètres constitués d’un cœur magnétique doux entouré d’une bobine excitatrice, qui permet ainsi de décrire un cycle d’hystérésis. Ce cycle peut être déplacé et ainsi détecté par la présence d’un champ magnétique.
En se référant à la loi de Faraday, un flux changeant produit une tension proportionnelle à ce flux. Par conséquent, un fluxgate peut être assimilé à un transducteur qui convertit un champ magnétique en une tension électrique.
La grande plage de mesures de ces capteurs (0.1 nT à 1 mT, pour des champs constants ou variant à des fréquences allant jusqu’à plusieurs kHz) permet de rendre cet instrument très polyvalent. Ceux-ci sont particulièrement appréciés dans le domaine de la géologie pour la mesure des champs géomagnétiques, militaire pour la détection des mines antipersonnel et enfin dans le domaine spatial pour contrôler le positionnement d’un satellite.
Comparatifs des différents types de capteurs magnétiques
Voici une vue d’ensemble des différents types de capteurs magnétiques, leur détectivité ainsi que quelques applications principales.
Concernant la détectivité, elle est définie comme le niveau de champ magnétique pour un rapport Signal sur Bruit (donné à 1 kHz) égal à 1, pour une bande de fréquence de mesure de 1 Hz.
Les valeurs ci-dessous sont données pour des capteurs qu’il est possible de réaliser de manière reproductible.
Quelques acronymes utiles :
- - IRM : Imagerie par résonance magnétique
- - MCG : Magnétocardiographie
- - MEG : Magnéto-encéphalographie
- - Tc : Température critique
- - TMR : Magnétorésistance à effet tunnel
Électrotechnique
Les transformateurs
Il s’agit d’un composant électronique qui permet de convertir des hautes tensions alternatives en basses tensions alternatives et inversement. Les fréquences sont conservées lors de la transformation.
Les transformateurs isolés galvaniquement
Les circuits primaires et secondaires sont isolés galvaniquement. Cela signifie que les deux circuits possèdent deux masses distinctes ou encore qu’il n’y ait pas de contact physique entre les deux circuits. On y retrouve les transformateurs de puissance et les transformateurs d’isolement.
- Avec circuit magnétique (ou dit à noyau ferromagnétique) :
Organes du transformateur :
- - Un solénoïde qui forme ce qu’on appelle le circuit primaire composé de N1 spires
- - Un autre solénoïde qui forme ce qu’on appelle le circuit secondaire composé de N2 spires
- - Un circuit magnétique fait d’un matériau ferromagnétique doux
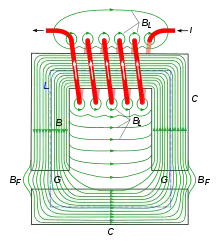
Principe de fonctionnement :
Une tension U1 est appliquée aux bornes du solénoïde qui compose le circuit primaire. Lors du passage du courant dans les spires, des boucles de champ magnétique sont créées perpendiculairement aux spires (par application de la loi de Biot et Savart ou du théorème d’Ampère).
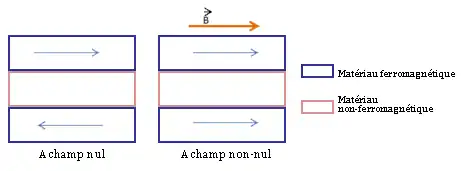
Ce champ magnétique est guidé vers le solénoïde du circuit secondaire par l’intermédiaire du circuit magnétique. Ce type de circuit est fait d'un matériau ferromagnétique : quand un champ est appliqué sur ce type de matériau, celui-ci s’aimante dans le sens du champ magnétique appliqué pour minimiser son énergie de Zeeman. En d'autres termes, les différents moments magnétiques qui composent le matériau s'orientent dans le sens du champ. De ce fait, le champ magnétique généré au primaire suit le circuit magnétique car énergétiquement, c’est plus favorable.
Le champ magnétique créé au primaire arrive au secondaire. Un phénomène d’induction magnétique s’ensuit. La loi de Lenz-Faraday indique que lorsqu’un solénoïde est traversé par un flux magnétique variable au cours du temps, une force électromotrice apparaît aux bornes du solénoïde pour générer un flux magnétique variable au cours du temps qui va s’opposer au premier flux. De ce fait, il faut utiliser des tensions alternatives et donc une force électromotrice U2 apparait aux bornes du solénoïde.
La force électromotrice vaut :
Comme on utilise des champs magnétiques variables, pour le circuit magnétique, il faut utiliser un matériau ferromagnétique doux. En effet, il faut que l’aimantation suive le champ et comme le champ varie souvent, l’aimantation a besoin de se retourner souvent. Il faut donc avoir des champs coercitifs les plus faibles possibles et une susceptibilité magnétique forte pour retourner l’aimantation facilement.
Le rapport de transformation vaut .




En changeant le nombre de spires N1 et N2, on peut transformer les tensions.
- Sans circuit magnétique (ou dit à noyau d’air) :
Ses organes et son principe de fonctionnement sont identiques à un transformateur avec circuit magnétique sauf qu’il n'en possède pas. Le solénoïde du secondaire, de diamètre plus petit se trouve à l’intérieur du solénoïde primaire de diamètre plus grand. Le flux magnétique généré par le primaire traverse directement le solénoïde secondaire.
Exemple célèbre de transformateur à noyau d’air : le transformateur de Tesla (ou plus communément appelée bobine Tesla).
Les transformateurs non isolés galvaniquement
Ce type de transformateur est constitué d’un seul solénoïde. Une déviation est installée sur une des spires qui compose le solénoïde. Cette déviation peut être fixe (autotransformateur) ou mobile (autotransformateur variable ou alternostat) appelée balais (généralement en carbone).
On applique une tension U1 aux bornes du solénoïde. Des boucles de champ magnétique sont donc créées perpendiculairement aux spires. Un phénomène d’auto-induction, d’après la loi de Lenz-Faraday apparait : une force électromotrice est créée pour s’opposer à la variation de flux magnétique traversant le solénoïde. On récupère cette tension transformée U2 au niveau de la déviation.
Ce type de transformateur présente l’avantage d’être moins cher à produire et moins volumineux et possède un meilleur rendement mais il possède le défaut de ne pas être isolé galvaniquement donc les accidents d’électrocutions sont plus probables.
Les relais électromécaniques
Il s’agit d’un composant électronique commandé par des faibles puissances (basses tensions et faibles courants) qui permet de jouer le rôle de commutateur sur des circuits électroniques à haute puissance (hautes tensions et forts courants).
Parties qui composent le relais :
- Un solénoïde alimenté en tension continue ou alternative
- Une armature mobile faîte à partir d’un matériau ferromagnétique
- Plusieurs contacts métalliques mobiles
Principe de fonctionnement :
Une tension (alternative ou continue, ça dépend du mode de fonctionnement) est appliquée aux bornes du solénoïde. Un courant traverse alors les spires de la bobine. Il se produit alors un phénomène d’induction magnétique : des boucles de champ magnétique sont créées perpendiculairement aux spires (application de la loi de Biot et Savart ou du théorème d’Ampère pour un solénoïde).
Une armature ferromagnétique mobile est placée à l’extrémité du solénoïde. Quand on applique un champ magnétique sur un matériau ferromagnétique, celui-ci s’aimante dans le même sens que le champ magnétique appliqué pour minimiser son énergie de Zeeman. De ce fait, le matériau ferromagnétique aura tendance à se rapprocher du champ magnétique le plus intense (qui se trouve au centre de la bobine) car énergétiquement c’est plus favorable. L’armature va donc « coller » le solénoïde.
En « collant » le solénoïde, l’armature bascule en poussant un contact métallique mobile qui permet de jouer le rôle d’interrupteur.
Avantages de ce type de composant :
- - Le principal avantage de ce type de composant est l’isolation galvanique qu’elle procure entre la partie commande faible puissance (solénoïde) et de la partie haute puissance du circuit électronique à commuter (relié par les contacts métalliques)
- - Capacité à commuter des signaux continus ou alternatifs de la partie commande à haute fréquence donc avec une grande réactivité
Inconvénients de ce type de composant :
- - Du fait de la présence du solénoïde, quand on passe brutalement d’un état à un autre, par arrêt du passage du courant ou inversement, le champ magnétique généré varie au cours du temps. La loi de Lenz-Faraday indique qu’une force électromotrice apparaît aux bornes du solénoïde pour induire un champ magnétique qui tend à s’opposer à la variation du flux magnétique au cours du temps. Ce phénomène induit des surtensions parasites aux bornes du solénoïde qui peuvent endommager les autres composants de la partie commande. De ce fait on place une diode pour éviter ces surtensions.
- - Couplages capacitifs entre les contacts métalliques qui peuvent amener les contacts à arquer entre eux. L’humidité ambiante peut jouer sur ce phénomène. De ce fait, le passage d’un état à un autre dans le temps n’est pas très précis.
Il existe un autre type de relais : le relais statique (opto-coupleur). Celui-ci fonctionne sur l’interaction entre une LED et une photodiode ou un phototransistor. Celui-ci présente comme avantage de n’avoir aucune partie mécanique. Ainsi on évite les problèmes d’usure mécanique et permet d’augmenter la fréquence de commutation. Cependant il présente un inconvénient important : il ne supporte pas les tensions trop hautes ou courants trop fort
Historique
L'électromagnétisme a été découvert en 1821 par le chimiste danois Ørsted. Le physicien anglais Michael Faraday a construit deux machines tournantes utilisant les phénomènes liés à l’électromagnétisme.

En 1822, Peter Barlow construit ce que l’on peut considérer comme étant le premier moteur électrique de l'histoire : la « roue de Barlow » qui est une plaque métallique en forme d’étoile et dont les pointes plongent dans un bac rempli de mercure qui permet la conduction électrique. Cependant, elle ne produit qu'une faible force juste suffisante pour faire tourner la roue, ce qui ne permet pas d'application pratique.
En 1869, l'inventeur belge Zénobe Gramme améliore les premières versions archaïques d'alternateurs et rend possible la fabrication des génératrices à courant continu. En 1871, il présente la première génératrice industrielle de courant continu à l'Académie des sciences de Paris, la machine de Gramme.
Le premier brevet no 391968 du moteur électrique à courant alternatif actuel, est déposé par le physicien d'origine serbe Nikola Tesla en 1887.
Moteurs électriques
Le moteur électrique est un dispositif électromécanique utilisant l'électromagnétisme pour permettre de convertir l'énergie électrique en énergie mécanique. Ce processus est réversible et permet également de produire une énergie électrique à partir d’une énergie mécanique.
L’énergie produite est proportionnelle au couple et au déplacement angulaire du moteur.
- Moteurs à courant continu :
 Moteur à courant continu
Moteur à courant continu
Le principal avantage des moteurs à courant continu vient de leur adaptation simple aux différents moyens permettant de contrôler leur vitesse, leur couple et leur sens de rotation : les variateurs de vitesse. Mais aussi, de leur raccordement direct à une source d'électricité : batteries d'accumulateurs, piles, super condensateurs, etc.
Le point faible des moteurs à courant continu vient de l'ensemble balais/collecteur rotatif qui est difficile à réaliser, réduit le rendement du moteur et sa durée de vie. De plus, la vitesse de rotation des moteurs à rotor bobiné est limitée. En effet, à haute vitesse la force centrifuge peut rompre les liens assurant la cohésion des ensembles de spires.
Ces inconvénients ont en partie été résolus par la réalisation de moteurs sans fer au rotor, telle que les moteurs « disques » ou « cloches », qui cependant utilisent toujours des balais. Ces inconvénients ont été totalement supprimés grâce à la technologie des moteurs brushless, ou « moteur sans balais ».
- Moteurs à courant alternatif :
Pour les applications de faible et moyenne puissance (jusqu'à quelques kilowatts), le réseau monophasé standard est suffisant. Pour les applications de plus de quelques kW, les moteurs à courant alternatif sont en général alimentés par une source de courants triphasé (phases décalées de 120°) utilisé par les fournisseurs d'électricité.
Il existe trois types de moteurs triphasé :
- - Les moteurs universels ;
- - Les moteurs synchrones ;
- - Les moteurs asynchrones.
Les moteurs universels :
Il peut être alimenté en courant continu ou en courant alternatif.
Les moteurs universels ont un rendement et un coût de fabrication faible. Leur vitesse de rotation est importante, mais leur couple est faible. Quand ils sont utilisés dans des dispositifs nécessitant un couple important, ils sont souvent associés à un réducteur mécanique.
On règle aisément leur vitesse de rotation avec des systèmes électroniques peu coûteux.
Les moteurs synchrones :
Le moteur synchrone est en général utilisé comme génératrice ou « alternateur ». Ce moteur est souvent triphasé.
Sa vitesse de rotation est proportionnelle à la fréquence des courants qui la traversent. Ce type de moteur peut être utilisé pour remonter le facteur de puissance d'une installation.
Les moteurs synchrones peuvent également être associés à des onduleurs de courants, cela permet de contrôler le couple moteur avec un faible courant.
Les moteurs asynchrones :
Contrairement au moteur synchrone, la vitesse de rotation du moteur asynchrone n’est pas obligatoirement synchronisé avec la fréquence des courants qui le traversent.
Il a longtemps été concurrencé par le moteur synchrone dans les applications de forte puissance, jusqu'à l'apparition de l'électronique de puissance. On la retrouve aujourd'hui dans de nombreuses applications telle que le transport (métro, trains, propulsion des navires), l'industrie (machines-outils), l'électroménager, etc. Il était au début uniquement utilisé en tant que moteur mais, grâce à l'électronique de puissance, il est de plus en plus utilisé en générateur. (Dans les éoliennes par exemple).
Pour les applications de forte puissance, supérieure à 6 kilowatts, les moteurs asynchrones sont toujours alimentés par des sources de courants triphasés.
Moteur pas à pas :
La particularité des moteurs pas à pas est de pouvoir contrôler le mouvement angulaire et la position de l’axe du moteur.
Les moteurs pas à pas simples ont un nombre limité de positions. Il existe également des moteurs pas à pas à commande proportionnelle (alimentation variable des bobines) qui peuvent être extrêmement précis.
Ces moteurs sont commandés par une électronique numérique et constituent une des formes les plus souples des systèmes de positionnement.
Génératrices
Un générateur électrique est une machine permettant de produire de l'énergie électrique à partir d'une autre forme d'énergie.
Il existe trois principaux types de génératrice utilisant les phénomènes du magnétisme pour convertir de l’énergie :
- - La machine dynamoélectrique
- - L’alternateur
- - La génératrice asynchrone
- La machine dynamoélectrique :
La dynamo est une machine tournante qui génère un courant continu . Cette machine est réversible et peut fonctionner aussi bien en génératrice qu'en moteur. Ce qui implique que, lors de son arrêt, la dynamo doit être déconnectée de sa charge si celle-ci peut lui fournir un courant en retour.
Cette propriété a été utilisée dans les petites automobiles des années 1970 : un système de relais connecte l'accumulateur pour fournir un courant à la dynastar afin de démarrer le moteur à combustion interne.Ensuite, la dynastar passe automatiquement en dynamo lorsque le moteur à combustion atteint un certain régime.
- L'alternateur :
Un alternateur est une machine tournante qui convertit l'énergie mécanique fournie au rotor en énergie électrique à courant alternatif.
L'alternateur produit une tension alternative de fréquence proportionnelle à la vitesse de rotation du rotor. Ces générateurs sont moins chers et ont un meilleur rendement que les dynamos (rendement proche de 95 % contre 85 % pour les dynamos).
Les applications des alternateurs sont très vastes. Ils sont utilisés pour la production d’électricité industrielle (centrales nucléaires, centrales hydrauliques, éoliennes…), également pour des applications domestiques (groupe électrogène), mais aussi dans des systèmes embarqués (camions, voitures, vélo...).
- La génératrice asynchrone :
Les machines asynchrones en régime de fonctionnement hypersynchrone (fréquence de rotation supérieure à la fréquence de synchronisation) fournissent également de l'énergie au réseau alternatif auquel elles sont connectées.
Leur désavantage est de ne pas pouvoir réguler la tension contrairement aux machines synchrones qui peuvent assurer la stabilité des réseaux électriques. Toutefois, elles sont de plus en plus utilisées en génératrices pour des applications de faibles et moyennes puissances telles que les éoliennes et les micro-barrages grâce au progrès récent de l'électronique de puissance.
Une des applications est la machine asynchrone à double alimentation.
Notes et références
- (en) Alisa Davis, « WPC Increases Power, Improves Us er Experience with New Qi Wireless Power Standard Specification », PISCATAWAY, N.J., June 23,2015,
- « Why Not A Wire? The case for wireless power », sur www.wirelesspowerconsortium.com (consulté le )
- Jean-Pierre Nozières, « Têtes de lecture et mémoires magnétiques », Reflets de la Physique, no 18,
- Jean-Christophe Perney, « Étude comparative sur les moyens d'archivage », sur www.ctmsolutions.com (consulté le )
- Abdelhamid ELAISSARI, « Ferrofluides et particules magnétiques pour applications biomédicales », Techniques de l'Ingénieur,
- « ThyssenKrupp Transrapid GmbH », sur www.transrapid.de (consulté le )
- Lise Loumé Des chaussures intelligentes capables d'éviter les blessures
- Claude Fermon & Myriam Pannetier-Lecœur, Électronique de spin et capteurs magnétiques
- Denis Stremplewski & François Mortier, Les capteurs GMR rivalisent avec l'effet Hall
- Les capteurs en instrumentation industrielle, Georges Asch et coll. Édition Dunod
- « La supraconductivité dans tous ses états », sur www.supraconductivite.fr (consulté le )
Voir aussi
Liens externes
- Mémoire magnétique à écriture par courant polarisé en spin assistée thermiquement, Matière condensée [cond-mat], Université de Grenoble, 2010, Jeremy Alvarez-Herault.
- The Ultra Small HDD for the Mobile Applications, Toshiba Corporation, Akihiko Takeo, Kazuhito Shimomura, Jun Itoh.
- Composants électriques, électroniques et modélisme ferroviaire
- Relais : le principe de fonctionnement
- Théorie relais électromagnétiques
- Théorie : relais
 Portail de la physique
Portail de la physique