Radar de régulation de distance
Un radar de régulation de distance (en anglais, adaptive cruise control, ou ACC) est un ajout au système de régulateur automatique de vitesse que l'on retrouve sur certaines automobiles modernes. L'appareil utilise un radar ou un laser pour mesurer la distance et la vitesse d'approche d'un véhicule précédant l'utilisateur ce qui permet d'ajuster la vitesse automatiquement afin de maintenir une distance de sécurité pour éviter la collision, puis de reprendre la vitesse de consigne en mémoire lorsqu'il n'y a plus d'obstacle ou de véhicule dans la distance programmée. Cette technologie est appelée à se répandre au cours des prochaines années[réf. souhaitée].

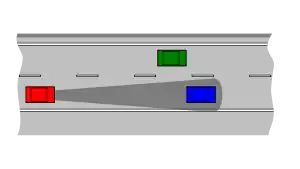
1) La voiture rouge arrive à une vitesse supérieure à la bleue
2) Le radar détecte le véhicule plus lent et adapte la vitesse pour obtenir une distance de sécurité
3) Le véhicule garde la même vitesse que le précédent et retourne à la vitesse initiale si le trafic se dégage


Tendance et prévalence
Le nombre de radars à ondes millimétriques vendus dans des systèmes automobiles s'élève à environ 30 millions en 2016. Le nombre de radars à ondes millimétriques vendus dans des systèmes automobiles s'élève à environ 68 millions en 2018. Certains experts s’attendent à une production de 132 millions en 2023 dans le même secteur automobile, selon le cabinet TrendForce[1].
En même temps, dès 2021 les premiers Automated Lane Keeping Systems vont intégrer des fonctions dépassant l'ACC jusqu'à des vitesses de 60 km/h.
Technologies
- Laser
L'utilisation d'un petit laser, comme émetteur, et d'un capteur montés derrière la grille avant d'une automobile est un système peu coûteux mais qui souffre d'un problème de diffusion de son faisceau lorsque la visibilité est mauvaise. En effet, la lumière visible qu'il émet est facilement absorbée ou réfléchie par les obstacles, en particulier dans les précipitations. En plus, si le véhicule à détecter est très sale ou boueux, la réflexion vers le capteur laser est également amoindrie. Son coût de 400 à 600 $US/Euro, en 2008, le rend accessible aux véhicules de classe moyenne.
- Radar
Un émetteur radar, de par la longueur d'onde utilisée, est beaucoup moins affecté par ces problèmes. Seules les très fortes précipitations peuvent mener à une absorption de l'onde. Le coût est cependant plus élevé, de 1 000 à 3 000 $US/Euro en 2008, ce qui le limite pour l'instant aux automobiles de luxe.
Dans les deux cas, un signal sonore de proximité peut être intégré au système afin d’avertir le conducteur de procéder à un freinage d'urgence lorsque la correction dépasse les limites du régulateur de vitesse.
Standardisation
L'ACC est standardisé par le standard ISO 15622:2010, Systèmes intelligents de transports — Systèmes stabilisateurs de vitesse adaptés — Exigences de performance et modes opératoires[2] révisée en ISO 15622:2018 Systèmes intelligents de transports — Systèmes stabilisateurs de vitesse adaptés — Exigences de performance et modes opératoires[3].
La norme est disponible en langue anglaise mais est indisponible en langue française[4]. Dans cet norme les systèmes stabilisateurs de vitesse adaptés s'appellent Adaptative Cruise Control par opposition à la génération précédente dénommée conventional cruise control.
Perception par le conducteur
Les ACC sont perçus comme relativement standard et agissant comme attendus[5]. Toutefois, il existe de nombreuses spécificités selon les modèles[6].
A ses débuts, l'augmentation de la pénétration de l'ACC a permis d'augmenter la réduction des risques de collisions[7].
Toutefois, les systèmes d'ACC ont diverses limitations, notamment par temps de pluie ou de brouillard[8].
Perspectives futures
Combinaison avec le steering
Certains véhicules combinent des fonctions similaires à l'ACC avec des fonction de steering. C'est par exemple le cas de la fonction ProPilot de Nissan.
Régulation périurbaine et coopérative
La prochaine génération de régulation de distance entre véhicules peut nécessiter l'information des positions, vitesses et accélérations des véhicules au voisinage et donc un canal de communication entre véhicules. Une stratégie de régulation plus dynamique, avec des distances plus courtes, en évitant les collisions, permet de réaliser des trains de véhicules dont le flux est plus important que le trafic actuel. Cela impose un stratégie de cohabitation avec les véhicules non équipés, qui ne devront pas être favorisés dans un trafic dense. Techniquement, les véhicules électriques, plus réactifs et à couple constant, sont plus adaptés à une régulation de distance très dynamique et à toute vitesse (pas seulement sur autoroute). La limite de dynamisme étant l'inconfort dû aux accélérations et décélérations trop fortes encaissées par les passagers. Une adaptation du code de la route est sûrement nécessaire pour permettre le déploiement massif des systèmes de régulation sur des véhicules d'entrée de gamme, allant même jusqu'à l'obligation, comme l'a été l'ABS. Une priorité peut être donnée par des moyens électroniques pour faciliter la fluidité des véhicules équipés qui fournissent leurs coordonnées sur Internet en temps réel. Enfin, ce système fortement déployé, améliore grandement le trafic, mais il est fortement perturbé par les véhicules non équipés.[réf. souhaitée] Il faut donc des mécanismes incitatifs et discriminatifs pour équiper rapidement le parc automobile.[non neutre]
Système automatisé de maintien dans la voie
Le système automatisé de maintien dans la voie est comme l'ACC réservé aux routes sans piétons. Il pourrait également constituer une évolution complémentaire de l'ACC.
Historique
Jaguar, Lexus et Mercedes-Benz furent les premiers manufacturiers à introduire en 1999 un tel système. Plusieurs constructeurs japonais ont commencé à les introduire dans leur marché japonais à cette époque. Les données étaient alors utilisées par le régulateur de vitesse pour diminuer les gaz et rétrograder les vitesses sans effet sur les freins. C'est sur l’Acura RL que le signalement d'un risque de collision a été introduit par système de rétraction de la ceinture de sécurité et l'action directe sur les freins si un objet se trouvait à moins de 100 mètres de la voiture.
Les Lexus de Toyota ont été les premières voitures équipées de détecteur au laser dans le marché nord-américain. En 2001, Lexus introduisait ainsi leur « DLCC » (Dynamic Laser Cruise Control[9]) qui fut offert d'abord sur la LS 430 et sur la série RX. L'utilisation du radar est apparue sur les modèles IS, ES, GS et LS.
D'autres constructeurs ont suivi, dont Volkswagen qui utilise un appareil d’Autocruise. En 2006, Mercedes-Benz a raffiné son système « Distronic » pour aller jusqu'à un arrêt complet en cas d'urgence. Celui-ci est installé dans sa luxueuse série S. Bosch a fait de même pour son appareil dans la Audi Q7.
Exemples de véhicules avec l'ACC (Adaptive cruise control)
- Acura RL
- Audi A1 II, Audi A3, Audi A4 (voir une démonstration sur YouTube), Audi A6, Audi A7, Audi A8, Audi Q5
- BMW Série 2 Active Tourer, BMW Série 2 Grand Tourer, BMW Série 3 (appelé Adaptative Cruise Control), BMW Série 5, BMW Série 6, BMW Série 7
- Cadillac DTS, Cadillac STS, Cadillac XLR
- Chrysler 300C
- Fiat Stilo
- Ford Mondeo, Ford Focus
- Honda Civic, Honda CRV
- Hyundai Genesis (appelé Smart Cruise Control)
- Infiniti M, Infiniti Q45, Infiniti G35, Infiniti FX, et G37
- Jaguar XK-R, Jaguar S-Type, Jaguar XJ à partir de 2003, Jaguar XF
- Kia Optima
- Lancia Thesis
- Lexus LS430/460, Lexus ES-350
- Lincoln MKS
- Nissan Primera T-Spec Models (appelé Intelligent Cruise Control)
- Opel Insignia, Zafira Tourer
- Mazda 6 >2013, Mazda 3
- Mercedes-Benz Classe S, Classe E, Classe CLS, Classe SL, Classe CL, Classe M, Classe GL, Classe CLK, Classe A
- Peugeot 308 II
- Range Rover Sport
- Renault Vel Satis, Renault Espace V, Renault Talisman, Renault Mégane IV
- Subaru Legacy, Subaru Outback et Subaru Impreza Japan-spec appelé SI-Cruise
- Suzuki Swift[10],[11].
- Tesla Model S
- Toyota Sienna XLE Limited Edition, Toyota Avalon, Toyota Sequoia Platinum Edition, Toyota Prius
- Volkswagen Passat, Volkswagen Phaeton, Volkswagen Touareg, Volkswagen Golf VII, Volkswagen Touran
- Volvo S80, Volvo V70, Volvo XC70, Volvo XC60, Volvo XC90, Volvo V40, Volvo S60, Volvo V60
Moto
Un ACC pour moto a été développé par BMW[12].
Notes et références
- « 68 millions de radars vont équiper les nouvelles voitures cette année, 132 millions en 2023 - Electronique », sur usinenouvelle.com/ (consulté le ).
- https://www.iso.org/fr/standard/50024.html
- https://www.iso.org/fr/standard/71515.html
- https://www.iso.org/fr/standard/71515.html
- https://www.consumerreports.org/car-safety/adaptive-cruise-control-guide/
- https://www.rac.co.uk/drive/advice/how-to/a-guide-to-adaptive-cruise-control/
- https://www.sciencedirect.com/science/article/abs/pii/S0001457517301628
- https://www.rac.co.uk/drive/advice/how-to/a-guide-to-adaptive-cruise-control/
- (en) Richard Bishop Consulting, « Finally! Adaptive Cruise Control Arrives in the USA », ivsource.net, (consulté le )
- http://www.largus.fr/actualite-automobile/prix-suzuki-swift-2017-tarifs-gamme-date-de-sortie-de-la-swift-4-8506392.html
- Jean-Michel Normand, « Suzuki Swift, elle a tout d’une grande », Le Monde, (lire en ligne).
- https://motomag.com/Un-nouveau-regulateur-de-vitesse-actif-chez-BMW
 Portail de l’automobile
Portail de l’automobile  Portail des camions
Portail des camions  Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique