Mars Science Laboratory
Mars Science Laboratory (MSL, en français « Laboratoire de science martienne ») est une mission d'exploration de la planète Mars à l'aide d'un astromobile (rover) développé par le centre JPL associé à l'agence spatiale américaine de la NASA. La sonde spatiale est lancée le par un lanceur Atlas V. Le site d'atterrissage, sur lequel la sonde spatiale s'est posée le , se situe dans le cratère Gale. Celui-ci présente dans un périmètre restreint donc compatible avec l'autonomie du rover, des formations reflétant les principales périodes géologiques de la planète dont celle — le Noachien — qui aurait pu permettre l'apparition d'organismes vivants. Au cours de sa mission, l'astromobile, nommé Curiosity, va rechercher si un environnement favorable à l'apparition de la vie a existé, analyser la composition minéralogique, étudier la géologie de la zone explorée et collecter des données sur la météorologie et les radiations qui atteignent le sol de la planète. La durée de la mission est fixée initialement à une année martienne soit environ 669 sols (jours solaires martiens) ou 687 jours (solaires) terrestres.
Pour les articles homonymes, voir MSL.
Cet article concerne le contexte, les objectifs et les caractéristiques techniques de la mission Mars Science Laboratory vers Mars. Pour le déroulement de la mission du rover Curiosity sur Mars, voir exploration de Mars par Curiosity.
Sonde spatiale

| Organisation |
|
|---|---|
| Constructeur |
|
| Domaine | Composition moléculaire et atomique du sol de Mars, géologie |
| Statut | Mission en cours |
| Autres noms | Curiosity (rover uniquement) |
| Lancement | |
| Lanceur | Atlas V 541 |
| Début de mission opérationnelle | |
| Fin de mission | Vers 2026 |
| Durée de vie | 22 mois (mission primaire) |
| Identifiant COSPAR | 2011-070A |
| Site | NASA Site JPL |
| Distance parcourue | 24,85 km (4 mars 2020) |
|---|
| Masse au lancement | 899 kg (rover) |
|---|
| MastCam | Caméras spectromètres |
|---|---|
| MAHLI | Caméra microscope |
| APXS | Spectromètre à rayons X et particules alpha |
| ChemCam | Ensemble comprenant un triple-spectromètre, un télescope pour focaliser l'ablation par laser et un micro-imageur (technique LIBS) |
| CheMin | Diffractomètre et spectromètre fluorescence X |
| SAM | Laboratoire d'analyse chimique |
| RAD | Détecteur de radiations |
| DAN | Détecteur de neutrons |
| REMS | Station météorologique |
| MARDI | Caméra de descente |

Le rover Curiosity est cinq fois plus lourd que ses prédécesseurs, les Mars Exploration Rovers (MER), ce qui lui permet d'emporter 75 kg de matériel scientifique, dont deux mini-laboratoires permettant d'analyser les composants organiques et minéraux ainsi qu'un système d'identification à distance de la composition des roches reposant sur l'action d'un laser. Les laboratoires embarqués sont alimentés par un système sophistiqué de prélèvement et de conditionnement d'échantillons comprenant une foreuse. Pour répondre aux besoins accrus d'énergie et s'affranchir des contraintes de l'hiver martien et des périodes nocturnes, le rover utilise un générateur thermoélectrique à radioisotope qui remplace les panneaux solaires mis en œuvre par les précédentes missions. Enfin, il bénéficie de logiciels évolués pour naviguer sur le sol martien et exécuter les tâches complexes qui l'attendent. Le rover est conçu pour parcourir 20 km et peut gravir des pentes de 45°.
La sonde spatiale au départ de la Terre a une masse de 3,9 tonnes et comprend un étage de croisière chargé d'amener la sonde jusqu'à proximité de la planète Mars, un véhicule de rentrée qui assure la traversée de l'atmosphère martienne à grande vitesse et un étage de descente chargé de la dernière phase aboutissant à l'atterrissage. Pour parvenir à poser le rover de 899 kg sur le sol martien avec la précision demandée par les objectifs scientifiques, la technique d'atterrissage utilisée par ses prédécesseurs a été profondément modifiée : la phase de rentrée atmosphérique est en partie pilotée pour restreindre la zone d'atterrissage à une ellipse longue de 20 km et large de 7 km. Le rover est déposé en douceur sur le sol par un étage de descente fonctionnant à la manière d'un hélicoptère-grue, seule méthode compatible avec sa masse.
MSL constitue la mission interplanétaire de la NASA la plus ambitieuse de la décennie. La complexité de la sonde et du rover ainsi que la nécessité de mettre au point de nouvelles technologies spatiales ont entraîné des modifications importantes du concept de départ durant le développement : les dépassements de coût qui en ont résulté ont failli entraîner l'annulation de tout le projet. Le lancement prévu initialement en 2009 a dû être repoussé à la fenêtre de lancement suivante, 26 mois plus tard, en 2011. Le coût total du projet est évalué en 2011 à 2,5 milliards de dollars.
Le contexte
La planète Mars, destination privilégiée de l'exploration spatiale

Depuis le début de l'exploration spatiale, la planète Mars constitue l'objectif favori des missions interplanétaires lancées dans le Système solaire[1]. Contrairement aux autres planètes du Système solaire, Mars a sans aucun doute connu par le passé des conditions assez proches de celles régnant sur Terre. Elles ont pu, mais cela reste à confirmer, permettre l'apparition de la vie. Mars conserve encore actuellement une atmosphère ainsi que de l'eau sous forme de glace dans les pôles[2]. Sa proximité permet d'y envoyer relativement facilement des sondes spatiales. Également, Mars constitue une destination incontournable si l'humanité doit se lancer dans un programme spatial habité ambitieux. Dans cette perspective, il est nécessaire d'effectuer des missions de reconnaissance.
Sur le plan scientifique l'exploration de Mars comporte actuellement trois objectifs :
- comprendre la genèse de la planète et son évolution ;
- reconstituer l'histoire de son climat ;
- savoir si Mars peut abriter la vie ou si elle l'a abritée par le passé.
Les réponses à ces trois questions sont susceptibles de nous aider à comprendre notre propre planète.
Les missions robotiques et la découverte de Mars
Pour des raisons à la fois de faisabilité technique et de coût, aucun projet d'exploration par un équipage d'astronautes n'a jusqu'à présent été mis en œuvre[Note 1]. Aussi, depuis le début de l'ère spatiale, l'exploration de Mars est confiée à des missions robotiques et le restera sans doute pour les vingt années à venir. Ces missions ont permis progressivement de mieux connaître cette planète sans pour autant apporter des réponses définitives aux principales interrogations scientifiques. Les engins spatiaux qui ont fait le plus progresser notre connaissance sont des orbiteurs (sondes spatiales placées en orbite autour de Mars) capables, grâce à des instruments d'une sophistication croissante, de collecter des données sur la surface de l'ensemble de la planète, son atmosphère ainsi que dans une certaine mesure son sous-sol.
Mariner 4 est la première sonde interplanétaire à s'être approchée de Mars, le ; elle a alors anéanti l'image d'une planète aux caractéristiques proches de la Terre en renvoyant les premières photos d'un monde désolé criblé de cratères d'impact, assez proche en apparence de la Lune. Le premier orbiteur martien Mariner 9 (1971) a nuancé cette vision en montrant que Mars présentait des formations géologiques variées : canyons, volcans, calottes polaires, champs de dune. Cette première vague d'engins d'exploration, dont certains soviétiques comme Mars 3 (1972) et Mars 6 (1974), s'est conclue avec les deux orbiteurs et les deux atterrisseurs du programme Viking (1975). Ces derniers transportaient un mini-laboratoire chimique susceptible de détecter l'existence de formes de vie. Les résultats des analyses, ambigus, ont été généralement interprétés comme une réponse négative. Les vingt années suivantes ont marqué une pause dans l'envoi de missions vers Mars, entrecoupées de trois échecs américains et soviétiques. Toutefois certaines découvertes sur Terre ont remis en question l'idée, désormais admise, d'une planète Mars stérile : des formes de vie ont été découvertes dans des lieux particulièrement hostiles au fond des océans ou dans des régions désertiques. L'orbiteur Mars Global Surveyor (1996) marque le retour de la NASA vers Mars. Il découvre des régions riches en hématite grise — un oxyde de fer qui se forme en présence d'eau —, détecte un champ magnétique résiduel qui semble indiquer que par le passé Mars était protégé des rayons stérilisants venus de l'espace par une barrière magnétique, et enfin trouve plusieurs manifestations d'une atmosphère dynamique comme la présence de ravines, absentes des photos prises par les missions précédentes, et qui auraient pu être formées par l'action de l'eau. Les instruments de l'orbiteur européen Mars Express (2003) permettent de confirmer la présence de grandes quantités d'eau stockée sous forme de glace au niveau des calottes polaires, détectent la présence de traces de méthane d'apparition récente dans l'atmosphère de la planète dont l'origine pourrait être soit biologique soit volcanique, et enfin découvrent des sédiments argileux qui n'ont pu apparaître qu'en présence d'eaux de surface peu acides, donc dans un environnement propice à la vie. Mars Reconnaissance Orbiter (2006), doté de caméras particulièrement puissantes, affine toutes ces découvertes en effectuant un inventaire systématique des terrains reflétant la présence d'eau : dépôts d'argiles, de carbonates et de sulfates. L'orbiteur détecte également la présence d'eau à des latitudes relativement basses confirmant que l'atmosphère martienne conserve les traces d'un changement récent d'inclinaison de l'axe de la planète[3].
Les atterrisseurs et les rovers

Les atterrisseurs (fixes) et les rovers mobiles, capables de circuler sur le sol, ont jusqu'à présent joué un rôle plus modeste dans l'exploration de Mars : ils sont essentiellement chargés de valider sur le terrain les déductions tirées des observations des orbiteurs. MSL prend la suite des deux atterrisseurs Viking statiques qui ont tenté d'identifier des traces du vivant (1975), de l'atterrisseur Pathfinder (1996) qui pour la première fois a mis en œuvre le rover de taille modeste (10,6 kg) baptisé Sojourner, des rovers MER (2003) de 174 kg qui sont les premiers à avoir effectué un véritable travail de géologue sur le terrain avec toutefois une palette d'instruments limitée par les contraintes de poids et enfin de l'atterrisseur statique Phoenix (2008) chargé d'étudier la région du pôle Nord martien.
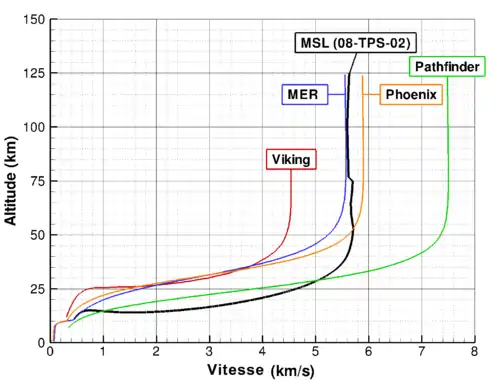
Poser un engin sur le sol martien est un exercice difficile, comme l'ont démontré les échecs de trois engins soviétiques et plus récemment de Mars Polar Lander (1998) et Beagle 2 (2003). Mars a en effet une gravité forte si on la compare à la Lune (un peu plus du tiers de celle de la Terre soit plus du double de la Lune) ; par ailleurs les sondes spatiales, pour parvenir jusqu'à la planète, doivent arriver à grande vitesse (environ 5 à 6 km/s). Un recours important au freinage à l'aide de moteurs-fusées comme cela s'est pratiqué sur la Lune (module lunaire du programme Apollo ou sonde Lunokhod) est exclu car la masse à lancer serait hors de portée des fusées existantes et le coût serait prohibitif. Il est donc nécessaire d'exploiter les forces de freinage générées par le frottement de l'engin spatial dans l'atmosphère martienne. Mais celle-ci est ténue et de faible épaisseur : avec les techniques maîtrisées au moment de la conception du rover MSL, il n'est pratiquement pas possible d'acheminer par cette méthode un engin de plus d'une tonne sur le sol martien, c'est-à-dire le poids du rover Curiosity de Mars Science Laboratory[4].
Genèse du projet
| Caractéristique | Mars Science Laboratory | Mars Exploration Rover |
|---|---|---|
| Taille | 3 × 2,7 m 2,2 m de haut |
1,6 × 1,6 m 1,5 m de haut |
| Masse | 899 kg | 170 kg |
| Charge utile | 75 kg (10 instruments) | 5 kg (5 instruments) |
| Bras télécommandé | 2,1 mètres de long, 2 instruments, préparation d'échantillon |
0,8 mètre de long, 3 instruments |
| Énergie | 2 700 watts-heures par sol | 1 000 watts-heures par sol |
| Autonomie | 20 km | 700 m[Note 2] |
| Durée nominale de la mission | 98 semaines | 13 semaines[Note 3] |
L'un des objectifs majeurs des planétologues spécialistes de Mars est de pouvoir analyser un échantillon du sol martien dans des laboratoires sur Terre. En 1988, un projet de retour d'échantillon est élaboré mais son coût, évalué à l'époque à sept milliards de dollars américains[Note 4], est jugé beaucoup trop élevé par les décideurs. Au cours des années 1990, le projet est réactivé par la NASA en partenariat avec le CNES : le scénario est élaboré en s'appuyant sur la « doctrine » des missions à bas coûts (better, faster, cheaper, en français « mieux, plus vite, moins cher ») promulguée par l'administrateur de la NASA de l'époque Daniel Goldin. Mais l'échec des deux missions martiennes de 1999, Mars Polar Lander et Mars Climate Orbiter, produits de cette politique, ainsi qu'une approche plus réaliste des coûts[Note 5] mettent fin au projet de retour d'échantillon au début des années 2000. La communauté scientifique poursuivait un autre objectif majeur, consistant à mettre en place un réseau géophysique constitué de stations automatiques statiques, disposées à la surface de Mars et chargées de collecter des données météorologiques, sismologiques et géologiques. Au cours des années 1990, plusieurs projets (MarsNet, InterMarsNet[Note 6]) sont élaborés dans le cadre d'une coopération internationale pour mettre sur pied ce réseau de stations mais tous échouent pour des raisons financières[6].
Au début des années 2000, les projets martiens d'envergure ne sont plus à l'ordre du jour au sein de la NASA, comme dans le cadre d'une coopération internationale, faute d'appuis financiers. L'agence spatiale américaine développe les rovers MER aux capacités limitées tandis que l'Agence spatiale européenne réalise son premier orbiteur martien Mars Express[7]. Pour disposer d'une stratégie à moyen terme, la NASA demande à un groupe de travail représentant la communauté scientifique internationale, le Mars Science Program Synthesis Group, de définir les orientations à donner à l'exploration martienne pour la décennie 2010-2020. Le livre blanc qui résulte des travaux de cette commission est produit en 2003. La recherche de l'eau qui avait servi de fil conducteur aux missions des années 1990 est remplacée par celle des composants permettant l'apparition de la vie. Quatre axes d'exploration sont identifiés avec des priorités qui pourront évoluer au fil des découvertes d'indices par les missions existantes — notamment MRO, dont le lancement est prévu en 2005 — ou futures :
- S'il est prouvé que Mars a connu une période chaude et humide, analyser les couches de sédiments et rechercher la présence de signes du vivant dans le passé de Mars ;
- Si des indices d'activités hydrothermales actuelles ou passées sont identifiés, explorer les sites en recherchant des signes de vie présente ou passée ;
- S'il existe des indices de présence de vie sur Mars et si un soutien politique existe, lancer une mission de retour d'échantillon s'appuyant sur un rover pour la collecte du sol ;
- S'il s'avère que Mars n'a pas connu de période chaude et humide, étudier l'histoire des gaz volatils sur Mars, déterminer les conditions régnant initialement sur Mars et l'évolution qu'a connue la planète afin d'aboutir à une compréhension globale des évolutions de Mars, Vénus et de la Terre.
La décision de lancer le développement du rover lourd et polyvalent Mars Science Laboratory est prise en 2003 et découle directement de ces travaux. Son instrumentation lui permet d'étudier la chimie du carbone sur Mars, de fournir des données dépourvues d’ambiguïté sur la géologie martienne et d'analyser les dépôts hydrothermaux, c'est-à-dire de constituer un instrument adapté pour trois des axes de recherche envisagés. La précision de son atterrissage (marge d'erreur de moins de 20 km) et son autonomie garantie (au moins 20 km) permettent pour la première fois, dans une mission impliquant d'atterrir à la surface de Mars, de cibler les sites martiens les plus intéressants, caractérisés généralement par la présence de reliefs tourmentés ou par une surface peu étendue[8],[9]. Compte tenu de son coût, Mars Science Laboratory est rattaché au programme Flagship qui regroupe les missions interplanétaires les plus ambitieuses de la NASA dont le budget peut atteindre plusieurs milliards de dollars et qui sont lancées tous les dix ans environ[Note 7].
Les objectifs de la mission
La mission Mars Science Laboratory poursuit quatre objectifs principaux[10] :
- déterminer si des conditions propices à la vie ont pu exister sur Mars ;
- caractériser le climat de Mars ;
- préciser la géologie de Mars ;
- préparer l'exploration humaine de la planète rouge.
Dans cette optique, et particulièrement du point de vue de l'habitabilité de la planète, Mars Science Laboratory devra travailler selon huit axes principaux[11],[12] :
- Recenser les composés organiques présents à la surface de Mars et établir leur distribution ainsi que leur concentration ;
- Quantifier les éléments chimiques fondamentaux de la biochimie : carbone, oxygène, hydrogène, azote, phosphore et soufre ;
- Identifier d'éventuelles traces de processus biologiques ;
- Caractériser la composition de la surface martienne et des couches superficielles du sol d'un point de vue minéralogique, isotopique et chimique ;
- Comprendre les processus de formation et d'altération des sols et des roches sur Mars ;
- Déterminer le schéma d'évolution de l'atmosphère de Mars sur les quatre derniers milliards d'années ;
- Établir le cycle de l'eau et le cycle du dioxyde de carbone sur Mars ainsi que la distribution actuelle de ces deux molécules sur la planète ;
- Mesurer le spectre large des radiations à la surface de Mars issues des rayons cosmiques, des bouffées de protons énergétiques émis par les éruptions solaires ou par les ondes de choc d'éjections de masse coronale, voire des neutrons secondaires issus de réactions de fission nucléaire dans l'atmosphère sous l'effet des rayonnements incidents.
La sélection du site d'atterrissage
Le choix du site d'atterrissage de Mars Science Laboratory est crucial pour le succès de la mission. Le site doit présenter un environnement géologique ou un ensemble d'environnements propices à la vie. Il doit permettre de réaliser la plus grande variété d'expériences afin de maximiser le nombre d'axes de recherche pouvant être explorés. Dans l'idéal, la région accessible depuis le site d'atterrissage doit présenter des spectres indiquant la présence simultanée de plusieurs minéraux hydratés, par exemple des argiles avec des sulfates hydratés. L'hématite, d'autres oxydes de fer, les sulfates, les silicates, ainsi peut-être que certains chlorures, pourraient avoir permis la fossilisation d'éventuelles formes de vie martiennes[13].
Les sites susceptibles d'avoir préservé d'éventuelles traces de vie passée présentent une topographie marquée, offrant ainsi une grande variété d'affleurements et de roches. Les concepteurs de la mission Mars Science Laboratory ont donc dû élaborer un véhicule capable d'atteindre et d'explorer de tels sites en toute sécurité[14]. Les contraintes techniques de la mission (masse de la sonde, scénario d'atterrissage) imposent de choisir un site d'atterrissage situé à moins de 45° de l'équateur de Mars et à moins de 1 000 m d'altitude au-dessus du niveau de référence martien[15].
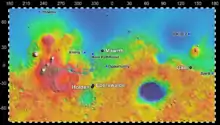
Pour sélectionner le meilleur site, la NASA lance un appel à idées auprès de la communauté scientifique internationale. Plus de 90 propositions, regroupées en 33 sites généraux, font l'objet d'études et sont classés au cours d'un 1er congrès consacré à la sélection du site d'atterrissage de MSL qui a eu lieu en [16]. Ce congrès et les suivants sont ouverts à l'ensemble de la communauté scientifique. Quelques autres sites sont ajoutés à la première liste et examinés au cours du deuxième congrès qui se tient l'année suivante, en [17] et qui se conclut, après un classement puis un vote, par la sélection de dix sites[18]. Le 3e congrès, qui a eu lieu en [19],[20],[21], remanie et réduit la sélection à sept sites : le cratère Eberswalde, le cratère Holden, le cratère Gale, Mawrth Vallis, Nili Fossae, le cratère Miyamoto et le sud de Meridiani Planum.
Quatre sites sont finalement retenus en novembre 2008[22]:
| Rang | Site | Coordonnées | Caractéristiques | Points forts | Points faibles |
|---|---|---|---|---|---|
| 1 | Delta du cratère Eberswalde | 24.0° S • 327.0° E altitude : -1,45 km |
Ancien delta argileux en relief inversé à l'embouchure d'un bassin fluvial. | Stratigraphie diversifiée dans un cratère de 5 km de profondeur datant du Noachien. | Processus de formation reste à mieux définir. La poussière recouvre peut être les sites intéressants. |
| 2 | Cône de déjection du cratère Holden | 26.4° S • 325.3° E altitude : −1,94 km |
Cratère comportant des structures liées à un passé lacustre. | Système alluvial bien préservé avec des couches sédimentaires permettant de reconstituer le passé climatique. Roches de nombreux types couvrant une vaste période de l'histoire de Mars. | Les dépôts pourraient ne pas être liés au passé lacustre. Faible variété des phyllosilicates susceptibles de préserver des organismes vivants. |
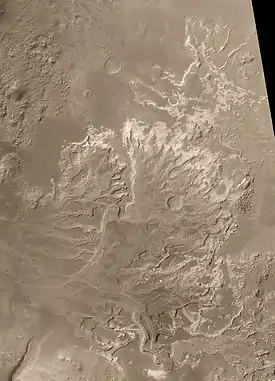
| 3 | Cratère Gale | 4.6° S • 137.2° E altitude : −4,45 km |
Cratère d'impact comportant un monticule central haut de 5 km et parcouru de brèches. | Strates diversifiées sur le monticule central incluant des minéraux hydratés de type phyllosilicate et sulfate déposés à l'époque où le cratère était occupé par un lac. | Le contexte de la formation géologique reste mal maîtrisé. Les sites les plus intéressants se trouvent à l'extérieur de l'ellipse dans laquelle s'inscrit la zone d'atterrissage. |
| 4 | Mawrth Vallis | 24.0° N • 341.0° E altitude : −2,25 km |
Ancienne vallée fluviale avec une longue histoire hydrologique. | Accès aux roches les plus anciennes des quatre sites. Proportion particulièrement importante de roches hydratées diversifiées. | Pas de consensus sur le processus de sédimentation. Les instruments de MSL ne seront peut-être pas capables de fournir des informations permettant de retracer l'histoire géologique du site. |
Nili Fossae, qui présente également des caractéristiques intéressantes (notamment de l'hydrothermalisme libérant du méthane), est devancé de très peu par Mawrth Vallis lors du vote de 2008, en raison des risques accrus à l'atterrissage par rapport à ce dernier. Le 20 août 2009, la NASA demande à recevoir d'autres propositions de sites d'atterrissage, examinés lors du 4e congrès de sélection, qui a lieu fin septembre 2010[25]. Cette réunion de travail est suivie d'une dernière, la 2e semaine de mars 2011, avant le lancement de la mission, programmé pour novembre 2011[26]. En juin, le nombre de sites d'atterrissage potentiel est réduit à deux : Gale et Eberswalde. Le , le site du cratère Gale est finalement retenu comme cible de la mission Mars Science Laboratory[27],[28].
L'équipement scientifique
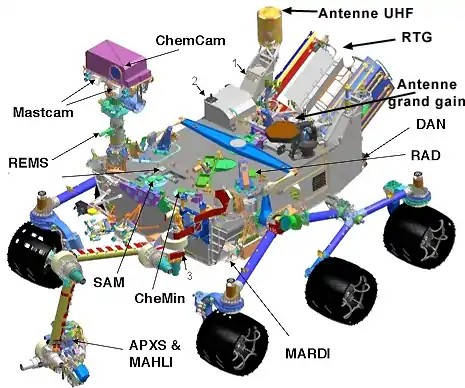
Le rover embarque 10 instruments scientifiques qui doivent lui permettre de détecter d'éventuelles traces d'eau, analyser précisément les roches, d'étudier les minéraux présents à la surface de Mars, mesurer la chiralité des molécules détectées, et effectuer des photographies à haute résolution. Certains de ces instruments sont développés avec la participation de laboratoires étrangers. Ces équipements se rangent dans quatre catégories[29] :
- deux instruments permettant de faire des analyses à distance et situés dans le mât du rover : la caméra MastCam et le système d'ablation laser et spectrométrie ChemCam qui détermine la composition des roches à l'aide d'un laser, fournissent une première analyse chimique et géologique de l'environnement ;
- deux instruments fonctionnant au contact de l'objet à analyser dont les senseurs sont situés au bout du bras du robot : le spectromètre à rayons X APXS et la caméra microscope MAHLI fournissent la composition chimique et des images détaillées facilitant la sélection des échantillons à analyser ;
- deux laboratoires d'analyse logés dans le corps du rover et alimentés en échantillon de sol ou de roche martienne par la foreuse et la mini pelleteuse situés au bout du bras du rover : CheMin qui effectue l'analyse minéralogique et SAM qui effectue l'analyse des éléments organiques et volatils ;
- quatre instruments caractérisant l'environnement martien : la station météorologique REMS, le détecteur de particules énergétiques RAD qui mesure les radiations qui parviennent jusqu'au sol, le détecteur de neutrons DAN chargé d'identifier la présence d'eau dans le proche sous-sol et la caméra de l'étage de descente MARDI qui réalise avant l'atterrissage des photos de la zone environnante.
MAHLI
.jpg.webp)
Le Mars Hand Lens Imager (en abrégé MAHLI) est une caméra microscope montée sur le porte-outils situé au bout du bras du rover. Elle doit permettre de caractériser la composition et la microstructure des roches, du sol, du givre et de la glace identifiables à une échelle comprise entre le micron et le centimètre. Elle fournit des images en couleurs en lumière visible. La tête de la caméra est équipée de 4 LED en lumière blanche pour éclairer la cible lorsque celle-ci est plongée dans l'ombre ou de nuit et 2 LED en ultraviolet pour produire de la fluorescence et détecter ainsi les minéraux carbonatés et les évaporites. La caméra peut faire une mise au point de 20,5 mm à l'infini, son champ optique étant compris entre 34 et 39,4°. Au plus près de l'objet photographié le champ couvert est de 18 × 24 mm et la résolution maximale de 15 micromètres par pixel grâce à un capteur CCD de 1600x1200 pixels. Deux capteurs permettent au système d'éviter un contact direct de l'optique avec l'objet photographié. MAHLI dispose d'un autofocus mais l'équipe au sol peut lui demander d'acquérir une séquence de 8 images du même objet avec des mises au point différentes pour obtenir une image tridimensionnelle car la profondeur de champ au plus près est de 1,6 mm (et pourra ainsi réaliser une image avec une grande profondeur de champ grâce à un logiciel de focus stacking embarqué). MAHLI peut être également utilisée pour inspecter le rover ou la configuration du terrain : sa position en bout de bras lui permet d'être placée dans une position plus haute que les caméras MastCam. Le spectre lumineux couvert va de 380 à 680 nm. La caméra a une capacité vidéo de 7 images par seconde au format 720p (1280x720 pixels)[30],[31].
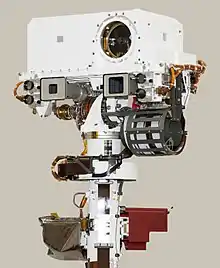
MastCam
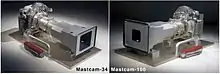
MastCam (Mast Camera) est un ensemble de deux caméras fixées au sommet du mât du rover MSL à une hauteur d'environ 1,97 mètre au-dessus du sol pouvant fournir des images en couleurs, en lumière visible et en proche infrarouge. Elles sont utilisées pour identifier les caractéristiques géologiques des terrains environnants et reconstituer la topographie du site. Elles doivent également enregistrer les phénomènes météorologiques (nuages, givre, poussières soulevées par le vent) et apporter leur contribution dans les tâches de navigation. Elles peuvent observer des détails d'une taille allant jusqu'à 0,15 mm. Selon les plans initiaux, les deux caméras devaient être identiques et munies d'un zoom avec une focale allant de 6,5 à 100 mm (rapport de 15). À la suite d'arbitrages budgétaires et après plusieurs rebondissements, deux caméras à focale fixes ont été finalement sélectionnées : à gauche, une caméra « grand angle » de focale de 34 mm (baptisée MastCam 34) ouvrant à f/8 et couvrant un champ de 15°x15°, et à droite, une caméra dotée d'un téléobjectif de 100 mm (baptisée MastCam 100) ouvrant à f/10 et couvrant un champ de 5,1°x5,1°. La caméra grand angle peut réaliser un panorama de 360° en 25 minutes par superposition de 150 photos[32].
Huit filtres avec une bande passante s'étageant entre 440 nm et 1035 nm peuvent être placés devant l'objectif. Seuls trois de ces filtres sont communs aux deux caméras. Contrairement aux modèles embarqués jusque-là sur les atterrisseurs et les rovers, une image en couleur est obtenue sans avoir à superposer 3 photos prises avec des filtres bleu-vert-rouge. L'image est enregistrée par un capteur de 1 200×1 600 pixels au format compressé JPEG ou au format brut RAW. Les images prises sont stockées dans une mémoire flash de 8 gigaoctets qui peut conserver 5 500 photos. Cette capacité de stockage est toutefois juste suffisante pour enregistrer un panorama en utilisant l'ensemble des filtres disponibles. La mise au point se fait de 2,1 m à l'infini : celle-ci peut être fixée par l'équipe sur Terre ou être déterminée par un autofocus. La durée d'exposition peut être également calculée automatiquement ou imposée par les contrôleurs au sol. Les caméras peuvent enregistrer des vidéos au format 720p (1280x720 pixels) à la cadence de 10 images par seconde ou de 5 images par seconde en utilisant toute la surface du capteur[33],[34].
MARDI
MARDI (MARs Descent Imager) est une caméra en couleur montée sous le châssis du rover et chargée de cartographier le site d'atterrissage durant la descente vers le sol martien. Elle couvre un champ de 70°x55°. La caméra doit prendre environ 500 photos (5 photos par seconde) à partir d'une altitude de 3,7 km (zone photographiée de 3 × 4 km) jusqu'à l'atterrissage (zone photographiée de 1 × 0,75 mètre) avec une résolution croissante de 2,5 mètres par pixel à 1,5 mm par pixel, soit sur une période de 2 minutes. La caméra comporte une mémoire de 8 gigabits qui permet théoriquement de stocker 4 000 photos en mode RAW. Les photos doivent être enregistrées dans ce mode et compressées avant leur transmission à Terre bien que la caméra puisse réaliser cette compression en temps réel. Ces photos seront utilisées par l'équipe au sol pour situer le site d'atterrissage et identifier les sites intéressants sur le plan géologique se trouvant à proximité du lieu d'atterrissage. Il est prévu que les mouvements de giration à grande vitesse angulaire qui animeront la sonde durant la descente sous parachute et les vibrations générées par les moteurs-fusées de l'étage de descente rendent un grand nombre de photos floues malgré un temps d'exposition de 1,3 milliseconde. La caméra a une résolution utile de 1600x1200 pixels. MARDI avait été éliminée de la charge utile de MSL lors des premiers arbitrages financiers en 2007 avant d'être réintégrée par la suite[35],[36].
ChemCam

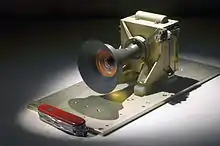
ChemCam (“CHEMistry CAMera”) est un instrument qui permet d'analyser à distance la nature, la composition et l’état d'altération des roches. Il utilise pour la première fois sur un engin spatial la technique d'analyse spectroscopique induite par ablation laser : un laser pulsé tire sur la roche à analyser provoquant la fusion de sa couche superficielle et générant un plasma. La lumière de désexcitation émise dans le visible et l'ultraviolet est collectée par un télescope et envoyée à des spectromètres qui établissent la composition chimique élémentaire de la roche. Avec une portée de 7 mètres, cet instrument permet d'analyser rapidement plusieurs échantillons de sol ou de roche et de déterminer s'il y a lieu de poursuivre l'analyse avec d'autres instruments. De plus son utilisation consomme relativement peu d'énergie. ChemCam est composé d'une partie optique montée au sommet du mât du rover et de trois spectromètres abrités dans le corps du rover avec la majorité de l'électronique. La partie optique comprend le laser qui envoie des impulsions venant frapper la cible sur un diamètre de 0,3 à 0,6 mm durant 55 nanosecondes pour effectuer des mesures par le procédé LIBS (Laser-Induced Breakdown Spectrometer). De 50 à 70 impulsions successives sont nécessaires pour obtenir une analyse spectrale correcte de la roche. L'optique de 110 mm utilisée pour viser la cible avec le laser permet de recueillir l'image renvoyée et de la transmettre par fibre optique aux spectromètres. Les spectromètres analysent la lumière sur une bande allant de 240 à 850 nm avec une résolution de 0,09 à 0,3 nm. La partie optique comprend également une caméra (Remote Micro-Imager ou RMI) fournissant une image du contexte de l'échantillon analysé. Commandée au CNES par la NASA, la réalisation de ChemCam a été confiée au CESR/Observatoire de Toulouse. Celui-ci a demandé au CEA (plateforme « laser nanoseconde pour applications industrielles » du département de physique et chimie) de réaliser les études préliminaires et la mise au point. La partie optique de l'instrument a été développée par l'IRAP à Toulouse sur la base d'un laser développé par Thales[37], sous financement CNES, tandis que les spectromètres et l'intégration de l'instrument sont placés sous la responsabilité du Laboratoire national de Los Alamos[38].
APXS
.jpg.webp)
APXS (Alpha-Particle-X-ray-Spectrometer) est un spectromètre à rayons X qui doit mesurer l’abondance des éléments chimiques lourds dans les roches et le sol. Il combine les techniques de la spectrométrie de fluorescence X et de la sonde nucléaire PIXE. L'instrument utilise du curium 244 comme source de rayons X. Il peut déterminer l'abondance relative des éléments allant du sodium au brome. Le capteur est monté sur le porte-outils situé au bout du bras du rover tandis que l'électronique se trouve dans le corps central du rover. La tête de l'instrument, dont la partie active a un diamètre de 1,7 cm, est placée à moins de 2 cm de l'échantillon à analyser durant une période allant de 15 minutes à 3 heures et restitue dans ce dernier cas jusqu'à 13 spectres électromagnétiques. Il s'agit d'une version améliorée d'un instrument qui a équipé les rovers Mars Pathfinder et MER. La demi-vie du curium 244 (18,1 ans) garantit qu'il sera opérationnel même si la mission est prolongée à plusieurs reprises. Contrairement à l'instrument de MER il peut être utilisé de jour grâce à un système de refroidissement électrique. Il est de 3 à 6 fois plus sensible que l'instrument équipant les rovers MER et le spectre analysé va jusqu'à 25 keV au lieu de 15 keV. Une analyse de trois heures permet de détecter une quantité de nickel de 100 parties par million et de 20 ppm de brome. La détection de certains éléments comme le sodium, le magnésium, l'aluminium, le silicium, le calcium, le fer et le soufre peut être obtenue au bout de 10 minutes si leur abondance est supérieure à 0,5 %. Un échantillon de roche basaltique monté sur le bras est utilisé pour calibrer périodiquement l'instrument. APXS est fourni par l'université de Guelph au Canada[39].
CheMin
CheMin (Chemistry & Mineralogy) est un instrument qui effectue l'analyse minéralogique d'échantillons de roches par diffraction X et par fluorescence des rayons X. La première technique permet d'identifier la structure cristalline des composants de l'échantillon tandis que la deuxième méthode fournit la composition en éléments et la concentration massique des différents éléments. Durant la phase de développement la capacité de l'instrument dans le domaine de la fluorescence des rayons X qui devait être fournie par une diode PIN a été réduite avec l'abandon de ce composant. L'objectif est de détecter la présence de minéraux formés en présence d’eau. CheMin est logé comme SAM dans la partie avant du corps du rover avec des ouvertures débouchant sur le pont supérieur permettant au bras d'introduire l'échantillon à analyser qui a été préparé auparavant. L'échantillon est introduit dans une capsule d'analyse situé sur une batterie (un carrousel) comprenant 26 autres capsules utilisables. Une analyse complète dure généralement 10 heures et est effectuée de nuit pour permettre le refroidissement du capteur CCD à −60 °C[40].
SAM (Sample Analysis at Mars)
SAM (Sample Analysis at Mars) est un mini laboratoire qui doit contribuer à déterminer l'habitabilité présente et passée de la planète. SAM est composé de trois instruments qui sont destinés à fournir la composition chimique (moléculaire, élémentaire et isotopique) de l'atmosphère et de la surface de Mars. Cette suite d'instruments est essentiellement destinée à la recherche d'indices possibles de vie passée sur Mars, ou d'une activité prébiotique, principalement par la recherche et la caractérisation des molécules organiques qui peuvent se trouver dans le sol martien. SAM comprend les éléments suivants[41] :
- un chromatographe en phase gazeuse (GC Gas Chromatograph). Celui-ci sépare les composants organiques des échantillons martiens sous forme gazeuse. Les échantillons gazeux peuvent provenir de l'atmosphère de Mars, ou du traitement thermique et chimique des échantillons solides collectés par le rover Curiosity. Les composés ainsi séparés peuvent être identifiés et envoyés vers l'instrument scientifique QMS pour obtenir une information sur la structure des molécules. La séparation est effectuée à l'aide de six colonnes chromatographiques, chaque colonne étant consacrée à une famille de composés chimiques. Le GC de SAM a été développé conjointement par le Laboratoire atmosphères, milieux observations spatiales (LATMOS) et le Laboratoire inter-universitaire des systèmes atmosphériques (LISA), deux laboratoires mixtes de recherche de l'université de Paris et du Centre national de recherche scientifique (CNRS) faisant partie de l'Institut Pierre Simon Laplace (IPSL), sous l'égide de l'agence spatiale française (CNES)[42],[43] ;
- un spectromètre de masse à quadrupôle (QMS (Quadrupole Mass Spectrometer)) utilisé pour analyser les gaz de l'atmosphère ou les produits obtenus par échauffement d'un échantillon du sol martien. (développé par les centres de la NASA/GSFC) ;
- un spectromètre laser réglable (TLS Tunable Laser Spectrometer) qui permet d'obtenir des ratios précis des isotopes de carbone et d'oxygène dans le dioxyde de carbone et de mesurer les traces de méthane et ses isotopes du carbone.(développé par le centre de la NASA Jet Propulsion Laboratory) ;
- un système de préparation d'échantillons réalisant pyrolyse, derivatization (en), combustion et enrichissement (CSPL) ;
- un système de manipulation d'échantillons (SMS) ;
- un ensemble de pompes et un système de purge (WRP).
SAM est situé, comme CheMin, dans la partie avant du corps du rover, avec des ouvertures débouchant sur le pont supérieur pour introduire les échantillons solides, et d'autres sur l'avant du rover pour les échantillons gazeux.
RAD

RAD (Radiation Assessment Detector) caractérise l'ensemble des particules élémentaires chargées (protons, électrons, noyaux d’hélium…) ou non (neutrons) qui atteignent le sol martien : ces particules sont émises par le Soleil ou sont d'origine plus lointaine (rayon cosmique). L'instrument doit identifier la nature des particules ainsi que mesurer leur fréquence et leur énergie. Les données recueillies doivent permettre de :
- déterminer le niveau de protection nécessaire pour une éventuelle exploration humaine de Mars ;
- déterminer l'impact passé et présent sur la chimie martienne ;
- mesurer les effets isotopiques ;
- évaluer les conditions permettant à d'éventuels organismes vivants de pouvoir survivre dans le sol martien (à quelle profondeur dans le sol). Les données collectées par l'instrument sur le rayonnement ultraviolet seront également utilisées dans cet objectif ;
- contribuer à enrichir les modèles relatifs au transport de ces particules par l'atmosphère martienne.
Les particules étudiées par RAD sont les ions d'une masse atomique allant jusqu'à 26, les neutrons énergétiques et les rayons gamma ayant une énergie comprise entre 10 et 100 MeV par noyau. L'instrument comprend un télescope à particules chargées comportant trois détecteurs plans utilisant des diodes PIN sur support silicium, un calorimètre à base de iodure de césium et un scintillateur plastique sensible aux neutrons. Un système anti-coïncidence fournit un blindage au calorimètre et au scintillateur[44],[45].
DAN
DAN (Dynamic of Albedo Neutrons) est un détecteur actif et passif de neutrons qui doit mesurer l’hydrogène présent dans la couche superficielle du sol martien (moins de 1 mètre de profondeur) le long de la trajectoire suivie par le rover. Ces données doivent permettre de déduire l'abondance de l'eau sous forme libre ou dans des minéraux hydratés. Cet instrument est développé par l'Institut de recherche spatiale de l'Académie des sciences de Russie[46].
REMS

REMS (Rover Environmental Monitoring Station) est une station météorologique qui mesure la pression atmosphérique, l’humidité, les radiations ultraviolettes, la vitesse du vent, la température du sol et de l’air. Les capteurs sont répartis sur plusieurs emplacements : deux grappes d'instruments sont attachés au mât de la caméra (Remote Sensing Mast RSM), à 1,5 mètre au-dessus du sol, et pointent dans deux directions écartées de 120° pour obtenir une bonne mesure de la direction et de la force des vents locaux ; six photodiodes sont situées sur le pont supérieur du rover et mesurent le rayonnement ultraviolet dans différentes longueurs d'onde. Enfin l'électronique de l'instrument située au sein du corps du rover est reliée à l'extérieur par un canal afin de mesurer la pression ambiante. L'instrument REMS est fourni par le Centro de Astrobiologia (CAB) espagnol[47]
MEDLI
Le véhicule de rentrée comprend un ensemble, baptisé MEDLI (MSL EDL Instrument) qui permet aux équipes au sol un suivi des paramètres atmosphériques et du comportement de la sonde MSL durant la rentrée atmosphérique. Les informations recueillies doivent permettre d'améliorer la conception des futurs sondes spatiales martiennes. MEDLI comprend[48] :
- 7 sondes de type MISP (MEDLI Integrated Sensor Plugs) mesurent à des points stratégiques du bouclier thermique la température à différentes profondeurs du matériau ablatif.
- 7 sondes MEADS (Mars Entry Atmospheric Data System) mesurent la pression en 7 points du bouclier thermique grâce à des capteurs placés à l'extrémité de trous de faible diamètre forés dans celui-ci.
Le recueil des données démarre 10 minutes avant la rentrée atmosphérique avec une fréquence d'échantillonnage de 8 Hertz et s'achève après le déploiement du parachute soit 4 minutes après la rentrée atmosphérique. Pour des raisons de volumes seule une faible partie des données recueillies est transmise en temps réel, le reste étant envoyé au cours du premier mois de la mission au sol.
Caméras HazCam et NavCam
Les caméras de navigation, bien que ne faisant pas partie des instruments scientifiques, fournissent dans certains cas des images exploitées à des fins scientifiques. Quatre paires redondantes, dites HazCam (Hazard Avoidance Cameras), sont montées deux par deux à l'avant et à l'arrière du corps du rover. Ces appareils dotés d'un objectif fisheye avec un champ optique de 124° fournissent des images en noir et blanc permettant de reconstituer une image tridimensionnelle de ce qui se situe devant et derrière le rover jusqu'à 3 mètres de distance et sur une largeur de 4 mètres. Deux autres paires de caméras (Navigation Cameras ou NavCams) montées au sommet du mât du rover de part et d'autre des caméras à usage scientifique MastCam, permettent d'obtenir des panoramiques en relief sur un champ de 45°[49].
Les caractéristiques techniques de MSL
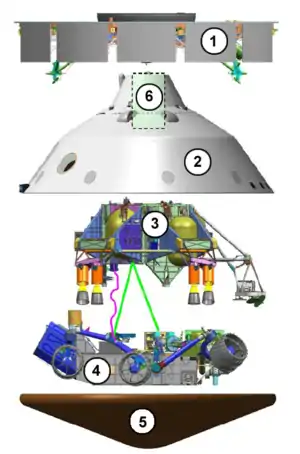
La sonde spatiale Mars Science Laboratory, comme les engins de sa catégorie qui l'ont précédée, se compose de quatre éléments principaux (cf schéma 1) :
- l'étage de croisière qui assure le transit entre la Terre et Mars ;
- le véhicule de rentrée qui protège la sonde durant la rentrée atmosphérique et assure une première phase de freinage ;
- l'étage de descente qui accomplit la dernière phase de descente puis dépose en douceur le rover sur le sol martien ;
- le rover Curiosity proprement dit chargé de mener à bien la mission sur le sol martien.
| Composant principal | Référ. schéma |
Sous-composant | Masse | Commentaire |
|---|---|---|---|---|
| Étage de croisière | 1 | - | 540,3 kg[50] | dont 73,8 kg de carburant |
| Véhicule de rentrée et étage de descente | 5 | Bouclier thermique avant | 440,7 kg[51] | |
| 2 | Bouclier arrière | 576,6 kg[51] | ||
| 3 | Étage de descente | 1 068 kg[52] | dont 397 kg de carburant | |
| - | Total | 2 085,3 kg | ||
| Rover Curiosity | 4 | - | 899 kg[53] | |
| Sonde spatiale MSL | - | Masse totale | environ 3 524,6 kg |
L'étage de croisière

L'étage de croisière est une structure cylindrique en aluminium de 4 mètres de diamètre et de faible hauteur d'une masse de 540,3 kg qui coiffe le reste de la sonde et supporte sur la partie opposée à celle-ci l'adaptateur permettant de solidariser MSL et son lanceur. Son rôle est de prendre en charge le transit de la sonde spatiale entre l'orbite terrestre et la banlieue de Mars. À l'approche de Mars, l'étage de croisière, qui a achevé sa mission et constitue désormais une masse pénalisante, est largué avant que le véhicule de rentrée n'entame la rentrée atmosphérique. La conception de l'étage de croisière est identique à celle utilisée par les sondes Mars Pathfinder et MER. Il effectue à l'aide de son système de propulsion les 5 à 6 corrections de trajectoire nécessaires pour que la sonde se présente à proximité de la planète Mars avec la vitesse et la position lui permettant d'effectuer un atterrissage de précision ; durant le transit de 8-9 mois entre la Terre et Mars il assure la surveillance et la maintenance des équipements de l'ensemble de la sonde[50],[54],[55].
L'étage de croisière sert d'interface durant le lancement entre la fusée et la sonde spatiale. À l'approche de Mars, peu avant la séparation avec l'étage de rentrée qui prend la conduite de la phase suivante, il fournit à celui-ci les dernières instructions de l'équipe au sol envoyées par les équipes du JPL et recueillies par ses deux antennes fonctionnant en bande X. Durant le transit entre la Terre et Mars il transmet à la Terre les informations sur l'état de la sonde collectées par l'ordinateur de bord du rover. À l'aide d'un viseur d'étoiles l'étage de croisière détermine en permanence sa position et son orientation en utilisant comme repère des étoiles de la Voie lactée et effectue les corrections de trajectoire préprogrammées à l'aide de son système de propulsion constitué de 8 petits moteurs-fusées consommant de l'hydrazine hypergolique stockés dans deux réservoirs en titane contenant 73,8 kg de carburant[Note 8]. Les équipements de l'étage de croisière doivent maintenir la température de l'étage de croisière mais également des autres composants de la sonde dans des limites acceptables. La chaleur produite par le générateur isotopique est transférée via un fluide caloporteur circulant dans une tuyauterie et est utilisée pour maintenir l'électronique de bord à une température suffisante. L'excédent de chaleur est évacué par 10 radiateurs situés sur la tranche du cylindre. L'étage de croisière dispose de son propre système de production d'énergie constitué par 6 panneaux solaires d'une superficie de 12,8 m2 produisant entre 2 500 watts au niveau de l'orbite terrestre et 1 080 watts à proximité de Mars. Pour stabiliser l'orientation de la sonde durant le trajet Terre-Mars, le système de propulsion de l'étage de croisière maintient MSL en rotation autour de son axe à une vitesse de 2 tours par minute[54],[56].
Le véhicule de rentrée
La traversée de l'atmosphère martienne à une vitesse initiale atteignant 6 km par seconde provoque un échauffement important des parties externes de la sonde qui atteignent une température de 2 100 °C. Pour protéger le rover durant cette phase, il est encapsulé dans un véhicule de rentrée. Celui-ci est composé d'un bouclier thermique avant, conçu pour résister à la forte chaleur que subit cette partie de la sonde, et d'un bouclier arrière, qui notamment contient le parachute. Le véhicule de rentrée a la forme d'une sphère-cône de demi-angle de 70° héritage du programme Viking repris sur tous les engins de la NASA envoyés à la surface de Mars par la suite. Par contre, la sonde innove avec des moteurs-fusées qui permettent de contrôler de manière active et non plus passive l'orientation du véhicule de rentrée jusqu'au déploiement du parachute afin de corriger les écarts par rapport à la trajectoire nominale et permettre un atterrissage de précision. Le bouclier encapsule l'étage de descente et le rover et est solidaire de l'étage de croisière durant le transit Terre-Mars[57],[58].
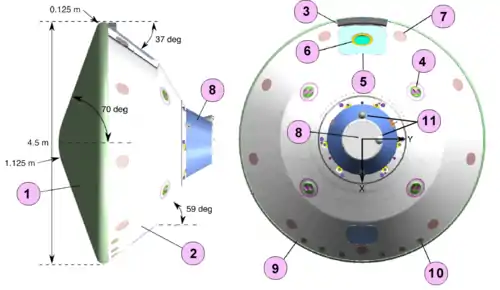

Le bouclier thermique avant
Le bouclier thermique avant, d'une masse de 440,7 kg, est une structure de 4,5 m de diamètre c'est-à-dire que sa taille est supérieure au bouclier de la capsule Apollo (4 m) et à celui utilisé par les rovers MER (2,65 m). Il y a une relation directe entre le diamètre du bouclier, l'efficacité du freinage atmosphérique et la masse qui peut être posée sur le sol martien en toute sécurité. Le diamètre retenu est la valeur maximale autorisée par les caractéristiques géométriques du lanceur et des installations de lancement[Note 9]. La masse de MSL se situe très près de la limite supérieure autorisée par ce diamètre[Note 10]. Le bouclier est recouvert d'un assemblage de tuiles faites d'un matériau ablatif, le PICA, qui évacue la chaleur en s'évaporant progressivement[57],[58].
Le bouclier arrière

Le bouclier arrière, d'une masse de 576,6 kg, doit faire face à des températures moins extrêmes. Sa structure, réalisée en nid d'abeilles d'aluminium subit des contraintes thermiques fortes du fait du rôle très actif joué par les moteurs-fusées durant la rentrée atmosphérique et il a fallu utiliser le matériau ablatif mis en œuvre sur le bouclier thermique avant par ses prédécesseurs. Il est percé de quatre ouvertures par lesquelles débouchent les tuyères des 8 moteurs-fusées d'une poussée de 308 newtons[59] utilisés pour contrôler l'angle d'attaque et plus généralement l'orientation de l'engin : le ratio portance/traînée (la finesse est ainsi adaptée en permanence durant la rentrée atmosphérique ce qui permet de corriger les erreurs de trajectoire). Des lests en tungstène, représentant une masse totale de 300 kg, sont largués avant et après la rentrée atmosphérique pour modifier le barycentre de la sonde. Le bouclier arrière comporte deux panneaux d'accès qui permettent d'intervenir jusqu'au dernier moment avant le lancement. Le bouclier est coiffé par le compartiment du parachute qui est déployé lorsque la vitesse de la sonde tombe en dessous de Mach 2. À la base de ce compartiment se trouvent les radômes des deux antennes à faible gain (l'une d'elles est inclinée) : celles-ci sont utilisées pour transmettre à la Terre des informations sur le déroulement de la rentrée atmosphérique.
L'étage de descente
L'étage de descente prend en charge la dernière phase de la descente et dépose en douceur le rover sur le sol martien. Il met en œuvre une architecture complètement différente de celle retenue pour les atterrisseurs martiens qui l'ont précédé[60] :
- les rovers MER et Mars Pathfinder ont utilisé des coussins gonflables pour la phase finale de l'atterrissage. Dans un tel système les vitesses horizontale et verticale résiduelles au moment du contact avec le sol sont importantes (plus de 10 m/s) tandis qu'un système complexe, donc lourd, est mis en œuvre pour que le rover puisse se dégager de l'étage de descente après l'atterrissage.
- les sondes Viking et Phoenix se sont posées grâce à des moteurs-fusées. Pour ne pas creuser la zone d'atterrissage et asperger de poussière la sonde, les moteurs sont coupés avant le contact avec le sol et la vitesse résiduelle à l'atterrissage (verticale 2,5 m/s et horizontale 1,5 m/s) doit être annulée grâce à des pieds dotés d'amortisseurs de choc.

La masse de Curiosity exclut le recours aux coussins gonflables. Les concepteurs de MSL n'ont pas voulu reprendre le concept développé pour Viking et Phoenix car il comporte des risques importants de perte du rover si l'atterrissage s'effectue dans une zone parsemée de rochers, en pente ou en présence de vents forts. Le rover Curiosity est descendu au bout de 3 câbles longs de 7,5 mètres par l'étage de descente, qui reste en position fixe au-dessus du sol à la manière d'un hélicoptère-grue grâce à ses moteurs-fusées : le rover est ainsi posé à très faible vitesse (0,75 m/s) sur le sol martien. Cette technique permet tout à la fois de poser le rover sur un sol pentu ou comportant des rochers, d'éviter que le souffle des moteurs ne soulève la poussière du sol et supprime le recours à un système de débarquement depuis l'étage de descente. Il se traduit par contre par une grande complexité de la phase de développement en particulier du système de guidage, navigation et pilotage[60].
Pour réaliser sa mission, l'étage de descente, d'une masse de 1 068 kg, comprend[60],[61] :
- huit moteurs-fusées (MLE Mars Lander Engines) d'une poussée unitaire modulable entre 400 et 3 060 newtons (de 13 à 100 %)[Note 11] chargés d'annuler la vitesse résiduelle de descente à partir de l'altitude de 1 km. Ils disposent à cet effet de 397 kg de carburant. Ces moteurs dérivent de ceux utilisés par l'étage de descente des sondes Viking[59] ;
- huit petits moteurs-fusées chargés du contrôle de l'orientation (attitude) de la sonde ;
- un radar doppler en bande Ka (TDS Terminal Descent Sensor) comportant 6 antennes émettant autant de faisceaux sous différents angles développé par le JPL. Dès que le bouclier thermique est largué le radar est chargé de déterminer l'altitude de la sonde et sa vitesse par rapport au sol martien ;
- trois câbles reliés à un enrouleur (Bridle Umbilical Device BUD) et un cordon ombilical qui relient le rover et l'étage de descente lorsque celui-ci dépose le rover sur le sol martien.
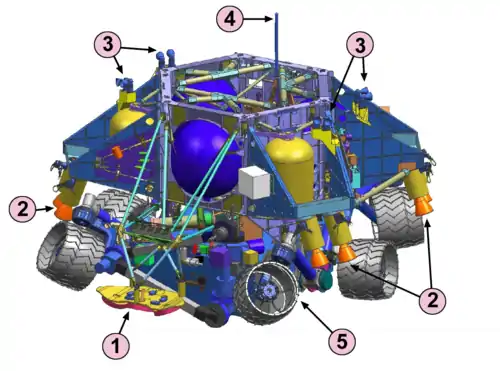
Le rover Curiosity
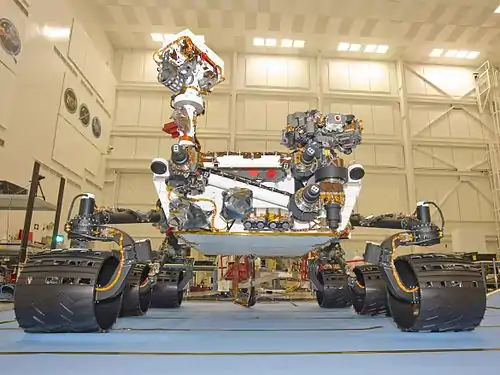


Le rover Curiosity est un engin particulièrement imposant avec une masse de 899 kg à comparer aux 174 kg pour les rovers Spirit et Opportunity, et à peine 10,6 kg pour Sojourner. Sa taille lui permet d'embarquer 75 kg d'instruments contre 6,8 kg pour les rovers MER. Le rover est long de 2,7 m. La partie centrale du rover montée sur roues, la « boîte électronique chaude » (warm electronics box ou WEB) renferme l'électronique et les deux instruments scientifiques qui doivent analyser les échantillons de sol et de roche. Un mât, qui est implanté sur l'avant de ce boîtier et qui culmine à 2,13 mètres, porte plusieurs caméras, des sondes atmosphériques, ainsi que le spectromètre laser. Le bras télécommandé est articulé à l'avant du rover et supporte à son extrémité les équipements de prélèvement d'échantillon ainsi que deux instruments scientifiques. L'arrière du boîtier est occupé par le générateur thermoélectrique à radioisotope que surplombent les antennes de télécommunications.
La suspension et les roues
Le rover doit parcourir des terrains présentant des irrégularités (rochers), des pentes fortes et un sol dont la consistance, parfois sableuse, peut conduire à l'enlisement du véhicule et entraîner sa perte comme ce fut le cas pour Spirit. Toutefois plusieurs caractéristiques permettent au rover de mieux faire face à ces difficultés que ses prédécesseurs. Curiosity peut s'aventurer sur des pentes à 45° sans se retourner. Il peut escalader des rochers ou franchir des trous d'une hauteur supérieure au diamètre de ses roues (50 cm). Pour y parvenir il utilise une suspension, baptisée rocker-bogie, mise au point par la NASA pour les rovers MER : celle-ci limite l'inclinaison de la caisse du rover lorsque celui-ci franchit un obstacle qui ne soulève qu'un seul des deux côtés. Les 6 roues, qui comportent à leur surface des cannelures pour une meilleure prise dans un sol mou ou sur des rochers présentant une face abrupte, sont équipées chacune d’un moteur individuel. Chacune des 4 roues d'extrémité comporte un moteur agissant sur la direction ce qui permet au rover de pivoter sur place[62].
La production d'énergie
Le rover Curiosity dispose d'une source d'énergie indépendante de l'éclairement. Elle provient d'un générateur électrique nucléaire[63]. Il s'agit plus précisément d'un générateur thermoélectrique à radioisotope (GTR) de nouvelle génération, le MMRTG développé par le DOE et produit par Boeing, utilisant une charge de 4,8 kg de dioxyde de plutonium PuO2 enrichi en plutonium 238 générant une puissance initiale d'environ 2 000 W thermiques convertis nominalement en 120 W électriques[63] par des thermocouples à base de nouveaux matériaux thermoélectriques, à savoir PbTe/TAGS[64] au lieu des anciens composants silicium-germanium. Le rover dispose de 2,7 kWh/j au lieu de 0,6 à 1 kWh/j sur Opportunity, dont la puissance résiduelle, le (après 1884 sols) n'était plus que de 460 Wh/j. De surcroît, cette puissance sera indépendante de l'intensité du rayonnement reçu du Soleil et n'imposera donc pas d'arrêter la mission pendant l'hiver martien, contrairement au cas de Spirit et d'Opportunity. MSL dispose d'une autonomie nominale d'une année martienne, soit près de deux années terrestres, mais sa source d'énergie devrait encore fournir 100 W électriques après 14 années terrestres de fonctionnement. L'électricité est stockée dans deux batteries rechargeables au lithium ion ayant chacune une capacité de 42 Ah. Un système de radiateurs comportant près de cinquante mètres de tubes dans lesquels circule un fluide caloporteur permet de rejeter la chaleur excédentaire[Note 12].
L'informatique embarquée
Le rover dispose de deux ordinateurs identiques « radiodurcis » pour résister aux rayons cosmiques. Ils utilisent tous deux un microprocesseur RAD750 fournissant une puissance de 400 MIPS à 200 MHz[65], successeur du RAD6000 utilisé par les Mars Exploration Rovers. Chaque ordinateur comporte 256 Ko d’EEPROM, 256 Mo de mémoire DRAM et 2 Go de mémoire flash. L'ordinateur de bord de Curiosity a une capacité dix fois supérieure à celle des rovers MER. Il pilote les activités du rover à la surface de Mars mais il joue également le rôle d'ordinateur de bord pour l'ensemble de la sonde durant toutes les phases allant du lancement jusqu'à l'arrivée sur le sol martien[66].
Le bras porte-outils

Comme les rovers MER, le rover MSL dispose d'un bras (Robot Arm RA) portant à son extrémité un ensemble d'outils utilisés pour analyser in situ des échantillons de sol et de roche ; le bras permet également de recueillir des échantillons qui sont analysés par les mini-laboratoires SAM et CheMin. Le bras est fixé sur la face avant du rover et, lorsqu'il est à son extension maximale, permet de positionner le porte-outils à 1,9 mètre de celle-ci. Les outils situés au bout du bras peuvent être positionnés face à la zone à analyser, sans que le rover se déplace, grâce à plusieurs articulations motorisées qui fournissent 5 degrés de liberté. Le volume d'espace accessible forme un cylindre vertical de 80 cm de diamètre, 100 cm de haut positionné à 1,05 mètre de la face avant du rover et dont la base peut se situer, sur un terrain plat, à 20 cm au-dessous du niveau du sol[67].
Le porte-outils, dont le diamètre extérieur est de 60 cm, comprend cinq outils[67] :
- deux instruments scientifiques
- le spectromètre à rayons X APXS,
- la caméra microscope MAHLI,
- trois instruments qui permettent de prélever et de conditionner des échantillons du sol et des roches martiennes pour analyse par l'équipement scientifique :
- la foreuse PADS (Powder Acquisition Drill System) permet de forer un trou de 5 cm de profondeur et d'un diamètre de 1,6 cm. Le matériau broyé est recueilli à partir d'une profondeur de 2 cm et transféré au système de préparation des échantillons CHIMRA. Une force de 240 à 300 newtons peut être exercée par le foret qui peut tourner à une vitesse comprise entre 0 et 150 tours par minute ou fonctionner en percussion à raison de 1 800 coups par minute avec une énergie de 0,4 à 0,8 joule. Au cas où le foret reste coincé dans la roche, la foreuse dispose de deux forets de rechange stockés sur la face avant du rover.
- la brosse DRT (Dust Removal Tool) d'un diamètre efficace de 4,5 cm permet d'enlever la couche superficielle de poussière qui recouvre la zone à examiner.
- le système de préparation des échantillons CHIMRA (Collection and Handling for Interior Martian Rock Analysis) comprend une mini pelleteuse et un système de préparation des échantillons. La mini pelleteuse permet de recueillir des échantillons du sol jusqu'à une profondeur de 3,5 cm et peut être abaissée dans une tranchée jusqu'à 20 cm au-dessous du niveau du sol.
La manipulation des échantillons du sol martien
Les échantillons du sol martien peuvent être recueillis à l'aide de la foreuse qui comporte un système de collecte de la roche broyée ; celui-ci est relié par une canalisation au système de préparation d'échantillons CHIMRA. L'échantillon peut être également recueilli par la pelleteuse incluse dans ce dernier équipement. En utilisant des mouvements de vibration imprimés à CHIMRA, en faisant marcher le système de percussion de la foreuse et à l'aide de mouvements de rotation du porte-outils exploitant la gravité martienne, l'échantillon est transféré au sein de CHIMRA dans des chambres de stockage puis, en passant par des tamis aux mailles plus ou moins fines, dirigé vers l'un des deux compartiments dont le contenu sera analysé : l'un d'une capacité de 45 à 65 mm3 ne peut accueillir que des composants solides d'un diamètre inférieur à 150 microns à destination de CheMin, l'autre, d'une capacité de 45 à 130 mm3, peut recevoir des composants solides d'un diamètre allant jusqu'à 1 mm. Le bras de MSL positionne alors l'ouverture du compartiment choisi au-dessus de l'ouverture d'un des deux instruments scientifiques (CheMin ou SAM) située sur le pont supérieur du rover : le contenu du compartiment à échantillon est alors déversé dans l'instrument scientifique après ouverture de portes en imprimant des vibrations à CHIMRA. L'échantillon peut être également déversé sur un petit plateau d'observation situé à l'avant du rover et étudié à l'aide de la caméra microscope et du APXS situés à l'extrémité du bras. Pour nettoyer le contenu de CHIMRA entre deux prélèvements d'échantillon, les différentes chambres de cet équipement sont ouvertes, mises en vibration pour évacuer complètement leur contenu et peuvent être examinées à l'aide des caméras du rover[68].
Pour s'assurer que les échantillons de sol martien analysés par SAM ou CheMin ne sont pas contaminés par des composants venus de la Terre qui auraient résisté aux procédures de stérilisation effectuées avant le départ, des vérifications peuvent être effectuées à cinq reprises au cours du séjour sur Mars : à cet effet cinq échantillons de référence dits Organic Check Material (OCM) ont été fixés sur le devant du rover dans des boîtiers scellés. Ces OCM contiennent du dioxyde de silicium amorphe dopés avec de petites quantités de produits organiques qui n'existent ni sur Terre ni a priori sur Mars. La foreuse est utilisée pour prélever un échantillon qui est ensuite analysé par SAM pour s'assurer qu'il ne détecte pas d'autres composants d'origine terrestre[69].
Télécommunications
Pour transmettre les données scientifiques recueillies, les données de navigation et les données télémétriques sur son fonctionnement ainsi que pour recevoir les instructions mises au point par l'équipe à Terre, le rover dispose de plusieurs antennes. Une antenne hélice quadrifilaire fonctionnant en bande UHF est utilisée pour les communications à courte portée avec les sondes en orbite autour de Mars. Le débit maximum est de 1,35 mégabit par seconde dans le sens rover-satellite et 256 kilobits dans le sens inverse[70]. C'est ce mode de communication qui est privilégié car les satellites sont fréquemment à portée d'antenne du rover : Odyssey et MRO stockent les données et les transmettent vers la Terre lorsque les stations terrestres sont en vue. Les deux antennes en bande X sont utilisées pour les communications à longue distance directement avec la Terre. L'antenne à faible gain omnidirectionnelle n'a pas besoin d'être orientée mais son débit est limité. L'antenne à grand gain en forme d'hexagone plat permet des débits importants mais doit être orientée avec précision vers la Terre. Elle a été développée par l'Espagne (EADS CASA ESPACIO) et dispose de deux degrés de liberté ce qui permet de la tourner vers sa cible sans déplacer le rover. Ces antennes sont fixées sur l'arrière du pont supérieur du rover[71].
La NASA a estimé le volume moyen de données scientifiques qui doit être transféré vers la Terre chaque jour à 250 mégabits tandis que les données utilisées pour établir le plan de travail représentent 100 mégabits par jour. L'essentiel de ce transfert devrait être assuré par MRO[Note 13] qui collectera les données en UHF durant son survol quotidien du site d'atterrissage de MSL aux alentours de 3 heures du matin. En moyenne MRO peut collecter chaque jour 687 mégabits de données avec un plus bas de 125 mégabits. La réception par le rover des instructions de la Terre se fera au début de la journée de travail en bande X à l'aide de l'antenne grand gain tandis que le compte rendu de la journée envoyé par le rover passera par la bande UHF[72].
La navigation sur le sol martien
Pour que le rover puisse se déplacer le rover et les équipes au sol utilisent les images fournies par plusieurs caméras. Quatre paires redondantes, dites HazCam (Hazard Avoidance Cameras), sont montées deux par deux à l'avant et à l'arrière du corps du rover et sont utilisées pour détecter les obstacles qui se présentent sur la trajectoire du rover. Ces appareils dotés d'un objectif fisheye avec un champ optique de 124° fournissent des images en noir et blanc permettant de reconstituer une image tridimensionnelle de ce qui se situe devant et derrière le rover jusqu'à 3 mètres de distance et sur une largeur de 4 mètres. Pour protéger les objectifs de la poussière soulevée par l'atterrissage, ceux-ci sont couverts par un cache qui est largué par un dispositif pyrotechnique une fois le rover sur le sol martien. Deux autres paires de caméras (Navigation Cameras ou NavCams) montées au sommet du mât du rover de part et d'autre des caméras à usage scientifique MastCam, permettent d'obtenir des panoramiques en relief sur un champ de 45°. Elles sont utilisées avec les caméras HazCam pour déterminer la configuration du terrain et planifier les déplacements du rover[73],[49]. Une centrale à inertie à trois axes doit faciliter la navigation sur le terrain. Le rover peut se déplacer à une vitesse de 4 cm par seconde en navigation automatique sans détection d'obstacles soit 150 m/h, mais si la détection d'obstacle est activée sa vitesse chute à 2 cm par seconde soit 75 m/h en moyenne compte tenu des irrégularités du terrain ou des problèmes de visibilité. Le rover Curiosity est conçu pour parcourir au moins une vingtaine de kilomètres au cours des 22 mois terrestres que doit durer au minimum sa mission primaire[74].
Le scénario de la mission
Le lancement

Le lanceur Delta II utilisé habituellement par la NASA pour le lancement de ses sondes interplanétaires n'a pu être retenu pour MSL compte tenu de sa masse et de son diamètre. La sonde doit être lancée par une fusée Atlas V 541 ; cette version du lanceur, de la classe de puissance de la fusée Ariane V, dispose d'une coiffe d'un diamètre de 5 mètres et peut placer une sonde de 4 tonnes sur une trajectoire interplanétaire[75].
La distance entre la Terre et Mars évolue constamment et cette dernière ne devient accessible que durant une période de quelques mois tous les deux ans. Par ailleurs, le lancement doit permettre à la sonde spatiale d'arriver à proximité de Mars dans des conditions très précises :
- le Soleil doit être levé sur le site d'atterrissage,
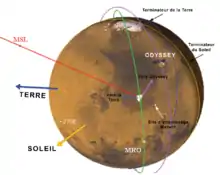
- les sondes Odyssey et MRO, en orbite autour de Mars, doivent pouvoir relayer les liaisons radio durant l'ensemble de la descente vers le sol martien,
- la zone de l'atterrissage doit être si possible couverte par les antennes de réception sur Terre sous un angle pas trop défavorable,
- la vitesse d'arrivée dans l'atmosphère martienne doit être inférieure ou égale à 5,9 km/s.
Toutes ces conditions ainsi que les capacités du lanceur retenu[Note 14] ont abouti à la sélection de deux fenêtres de lancement de 24 jours. La première située entre le et le est plus favorable, car elle permet une entrée à une vitesse inférieure à 5,6 km/s mais est toutefois conditionnée par le respect du planning de lancement de la sonde jovienne Juno planifié en et qui utilise les mêmes installations de lancement de la base de Cap Canaveral en Floride[Note 15] ; la seconde fenêtre de lancement, finalement retenue, se situe entre le et le . En fonction du jour de lancement, le lanceur doit imprimer une vitesse de libération comprise entre 11,2 et 19,9 km/s. Pour répondre à la réglementation imposée pour les lancements emportant du matériel radioactif, le lancement doit avoir lieu de jour. La fenêtre de lancement résultante est d'environ 2 heures par jour[76].

Le lancement se déroule en deux phases. Le deuxième étage Centaur du lanceur place la sonde MSL sur une orbite basse terrestre de 165 km × 271 km avec une inclinaison de 29°. Puis, après avoir accompli un nombre variable d'orbites autour de la Terre, lorsque la position de l'ensemble permet d'obtenir des conditions optimales d'arrivée sur Mars le deuxième étage Centaur est remis à feu et celui-ci injecte MSL sur une trajectoire interplanétaire vers Mars qui doit lui permettre d'atteindre Mars sur son inertie en décrivant une orbite de Hohmann. Après l'extinction de l'étage Centaur, celui-ci met en rotation lente (2 tours par minute) la sonde pour stabiliser sa trajectoire puis la séparation de la sonde et du lanceur est déclenchée[77].
Le transit entre la Terre et Mars

Après sa séparation avec son lanceur, la sonde spatiale entame la phase de croisière, d'une durée d'environ sept mois, durant laquelle elle se rapproche de Mars uniquement grâce à sa vitesse acquise. Durant cette phase le rôle actif est joué par l'étage de croisière[78] :
- la sonde durant ce transit est stabilisée par mise en rotation autour de son axe à la vitesse de 2 tours par minute.
- l'étage de croisière maintient l'orientation de la sonde pour que ses panneaux solaires et son antenne de télécommunications soient pointés respectivement vers le Soleil et la Terre.
- l'étage de croisière effectue si nécessaire des petites corrections d'attitude en utilisant son viseur d'étoiles pour détecter les écarts. Sept corrections de trajectoire (Trajectory correction manoeuver TCM) sont programmées durant le transit Terre-Mars dont deux facultatives. Les deux premières, 15 jours et 120 jours après la date de lancement, permettent de corriger les erreurs d'injection sur la trajectoire interplanétaire et de supprimer le biais introduit volontairement pour éviter une retombée de l'étage Centaur sur Mars qui pourrait contaminer la planète. La troisième correction TCM-3 doit permettre à la sonde de se présenter exactement au point voulu pour entamer une descente optimale sur le sol martien. Enfin 4 manœuvres de correction sont prévues dans les 8 jours qui précèdent l'arrivée à j-8, J-2, J-1 et J-9 heures. Toutes ces corrections sont effectuées soit en alignant l'orientation de manière à optimiser la consommation de carburant soit en maintenant l'orientation[79].
- l'étage de croisière contrôle les paramètres de la sonde et les transmet aux équipes sur Terre.
La date d'arrivée sur le sol martien, qui dépend de la date de lancement, doit avoir lieu entre le 6 et le 20 août 2012. La sonde entame les préparatifs pour l'atterrissage, qui est la partie la plus délicate de la mission, 45 jours avant celui-ci. D'ultimes corrections de trajectoire sont effectuées après des mesures très précises depuis la Terre de la position et du déplacement de MSL. Les dernières instructions pour la phase de rentrée et la séquence des opérations au sol pour les premiers jours sont actualisées[80].
Nouvelles techniques de descente
Pour pouvoir poser la masse du rover cinq fois supérieure à celle de ses prédécesseurs et effectuer un atterrissage de précision qui permette au rover Curiosity d'atteindre la zone d'étude choisie par les scientifiques sans avoir à faire un nombre de kilomètres supérieur à ce que lui permet son autonomie, MSL inaugure de nouvelles techniques de descente vers le sol martien :
La première partie de la descente se déroule à une vitesse hypersonique. Alors que ses prédécesseurs ont eu durant cette phase un comportement passif, MSL adapte en permanence à l'aide de petits moteurs-fusées son angle d'attaque. Cela lui permet d'une part de prolonger la phase de descente : la trajectoire de la sonde décrit des S en jouant sur l'inclinaison latérale. Le gain de temps obtenu permet à MSL de diminuer plus tôt sa vitesse et donc se poser à une altitude supérieure[Note 16]. D'autre part les moteurs-fusées permettent de corriger les écarts par rapport à la trajectoire conduisant au site visé en jouant également sur l'angle d'attaque. Cette technique permet de restreindre la zone d'atterrissage probable à une ellipse de 10 km sur 5 km de large contre 80 km sur 12 km pour les rovers MER. Le site sélectionné peut comporter une zone d'atterrissage dégagée de taille beaucoup plus réduite et met à portée du rover des sites d'un grand intérêt géologique qui seraient inaccessibles avec une précision plus faible[81].
Le rover inaugure une nouvelle technique d'atterrissage final[82] :
- pour se poser sur le sol de Mars, le recours au système des coussins gonflables mis en œuvre par les rovers MER (Spirit et Opportunity) n'est pas adapté à la masse de MSL 5 fois plus lourd : en effet cette technique impose une enveloppe protectrice qui représentait pratiquement 2 fois la masse du rover MER (348 kg pour un rover de 185 kg). Transposé à MSL on aboutit à une masse d'environ 1,7 tonne, alors que la solution retenue permet d'avoir un étage de descente de 1,2 tonne.
- la solution alternative mise en œuvre par les atterrisseurs Viking, qui ont eu recours à des moteurs-fusées pour se poser, n'est pas non plus transposable. En effet le rover Curiosity, contrairement aux atterrisseurs Viking fixes, doit pouvoir se dégager de son étage porteur.
La solution retenue est un atterrissage ayant recours à des fusées fixées sur un étage de descente qui se désolidarise du rover dans les derniers mètres pour déposer celui-ci au-dessus du sol avant de s'élever à nouveau pour s'écraser à distance de sécurité.
| Caractéristiques | Viking (1975) | Mars Pathfinder (1996) | MER (2003) | MSL (2011) |
|---|---|---|---|---|
| Masse au début de la rentrée atmosphérique | 992 kg | 584 kg | 827 kg | 3 299 kg |
| Masse à l'atterrissage | 590 kg | 360 kg | 539 kg | 1 541 kg |
| Masse du rover | - | 10,5 kg | 185 kg | 899 kg |
| Contrôle durant la rentrée atmosphérique | Orientation uniquement | Non | Non | Angle d'attaque |
| Ratio portance/trainée | 0,18 | 0 | 0 | 0,22 |
| Diamètre du parachute | 16 m | 12,5 m | 14 m | 21,5 m |
| Vitesse à l'ouverture du parachute | Mach 1,1 | Mach 1,57 | Mach 1,77 | Mach 2 |
| Vitesse verticale et horizontale à l'atterrissage | Vv < 2,4 m/s Vh < 1 m/s | Vv < 12,5 m/s Vh < 20 m/s | Vv < 8 m/s Vh < 11,5 m/s | Vv < 0,75 m/s Vh < 0,5 m/s |
| Méthode d'atterrissage | Rétrofusées | Coussins gonflables | Coussins gonflables | Grutage |
| Précision de l'atterrissage | 280 × 180 km | 200 × 100 km | 80 × 12 km | 7 × 20 km |
L'atterrissage sur Mars se décompose en cinq phases :
- la phase d'approche,
- la rentrée atmosphérique pilotée qui fait tomber la vitesse à Mach 2 tout en corrigeant de manière active les écarts par rapport à la trajectoire idéale,
- la descente sous parachute lorsque la vitesse a chuté sous Mach 2,
- la descente propulsée à partir de 1500 mètres d'altitude grâce à des moteurs chargés d'annuler la vitesse résiduelle,
- la dépose par l'étage de descente fonctionnant à la manière d'un hélicoptère grue du rover sur le sol martien.
La phase d'approche
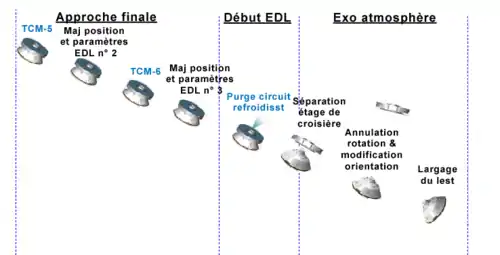
L'objectif principal de la phase d'approche est que la sonde spatiale arrive au point d'entrée dans l'atmosphère martienne et à l'heure planifiée. À cet effet une dernière correction de trajectoire (TSCM-6) est effectuée, si nécessaire, 9 heures avant la rentrée atmosphérique[84] après analyse de la position et du vecteur vitesse de la sonde. L'équipe du JPL estime que l'erreur de positionnement à l'entrée dans l'atmosphère devrait être au plus de 2 km et l'écart de la vitesse réelle par rapport à celle prévue de 1,5 m/s. Plusieurs manœuvres sont alors effectuées[85] :
- les moteurs de contrôle d'orientation du véhicule de rentrée sont préchauffés et le circuit de régulation thermique est purgé tandis que la sonde recale son orientation en utilisant son viseur d'étoiles.
- le véhicule de rentrée qui encapsule le reste de la sonde largue l'étage de croisière 10 minutes avant le début de la rentrée atmosphérique.
- la vitesse de rotation de la sonde sur son axe est annulée : désormais la sonde est stabilisée 3 axes.
- puis la sonde modifie son orientation qui privilégiait les télécommunications avec la Terre et l'éclairage des panneaux solaires pour adopter la position qu'elle maintiendra durant la rentrée atmosphérique avec son bouclier thermique tourné vers l'avant.
- cinq minutes avant la rentrée atmosphérique deux lests de 75 kg sont éjectés pour déplacer le barycentre jusque-là situé dans l'axe de la sonde : le déséquilibre généré permet par la suite de maintenir un angle d'attaque non nul générant une portance qui prolonge la descente[Note 17] et donne le temps à la sonde de réduire suffisamment sa vitesse avant d'atteindre le sol.
Une rentrée atmosphérique pilotée

La descente vers Mars débute lorsque la sonde spatiale aborde les couches supérieures de l'atmosphère martienne dont l'altitude est fixée arbitrairement à 226 km au-dessus du sol. MSL entame alors une descente qui va durer environ 7 minutes. Lorsqu’elle débute sa rentrée atmosphérique la vitesse de MSL est alors comprise entre 5,5 et 6 km/s (Mach 24). Le véhicule de rentrée constitué de deux boucliers jointifs joue deux rôles : alors que le freinage atmosphérique porte la température du bouclier avant à une température atteignant en pic 1 450 °C, il maintient une température normale dans le corps de la sonde. Par ailleurs, le bouclier arrière dispose de 4 petits moteurs-fusées émettant des jets de gaz, qui permettent à la sonde d'ajuster de manière continue son angle d'attaque ; celui-ci, maintenu normalement à 18°, est ajusté pour compenser les écarts par rapport à la trajectoire cible engendrés par les perturbations atmosphériques et le comportement aérodynamique du véhicule de rentrée. Lorsque la vitesse de l'engin est tombée en dessous de 900 mètres par seconde, l'angle d'attaque est réduit à 0 par éjection de 6 lests de 25 kg qui replace le barycentre dans l'axe de la sonde. Il s'agit de limiter les oscillations créées par le déploiement du parachute. La sortie de celui-ci est déclenchée lorsque la vitesse est tombée en dessous de 450 mètres par seconde (presque Mach 2)[86].
La descente sous parachute

Le parachute d'un diamètre de 21,5 mètres est, à un facteur d'échelle près, un héritage du parachute développé pour le programme Viking. Durant sa descente sous parachute qui dure entre 50 et 90 secondes, la vitesse de MSL est ramenée à 100 m/s (360 km/h) et environ 95 % de l'énergie cinétique qui subsistait avant son ouverture est dissipée. Le bouclier thermique est éjecté dès que la vitesse tombe en dessous de Mach 0,8[Note 18] ce qui dégage l'antenne du radar Doppler de l'étage de descente qui peut fournir une première estimation de l'altitude et de la vitesse en utilisant les réflexions de ses émissions sur le sol martien. Durant cette phase, la sonde doit limiter la rotation de la capsule sous le parachute, un phénomène difficile à modéliser et dangereux qui découle des oscillations à vitesse supersonique ; les moteurs de contrôle d'orientation du bouclier arrière sont utilisés pour contrecarrer ces mouvements. La caméra MARDI commence à prendre des photos du sol martien sous le rover au rythme de 5 images par seconde dès que le bouclier thermique avant n'obstrue plus le champ de son optique jusqu'à l'atterrissage environ 2 minutes plus tard : les images seront exploitées par les scientifiques pour situer la future zone d'atterrissage et identifier les formations géologiques intéressantes à explorer situées à moins de 2 km de celui-ci ; elles permettent également de vérifier les performances de la centrale à inertie du rover. À une altitude comprise entre 1500 et 2000 mètres le bouclier arrière et le parachute sont largués afin d'entamer la descente propulsée. Juste avant ce largage, les 8 moteurs de l'étage de descente sont mis en marche à 1 % de leur poussée nominale[87].

La descente propulsée

La descente propulsée a deux objectifs : amener la sonde jusqu'à l'altitude de 18,6 m avec une vitesse verticale résiduelle de 0,75 m/s et une vitesse horizontale nulle, tout en modifiant la trajectoire de la sonde, de manière que le rover n'atterrisse pas au même endroit que le bouclier arrière ou le parachute. Au début de cette phase le bouclier arrière et le parachute qui lui est attaché sont largués par déclenchement de charges pyrotechniques. L'étage de descente tombe durant une seconde en chute libre pour s'éloigner suffisamment, puis les 8 moteurs augmentent leur poussée pour parvenir, à une altitude de 100 mètres, à réduire la vitesse verticale à 20 m/s et à annuler la vitesse horizontale. Parallèlement, la sonde est écartée de 300 mètres de la trajectoire suivie par le bouclier et le parachute. La descente se poursuit à la verticale pour disposer d'une mesure de l'altitude précise et corriger une estimation antérieure qui peut être erronée de 50 mètres du fait du relief et du déplacement en partie horizontal de la sonde. À partir de 50 mètres d'altitude, la vitesse verticale est ramenée à 0,75 m/s lorsque l'altitude de 21 mètres est atteinte. La sonde fait alors quasiment du surplace[88].
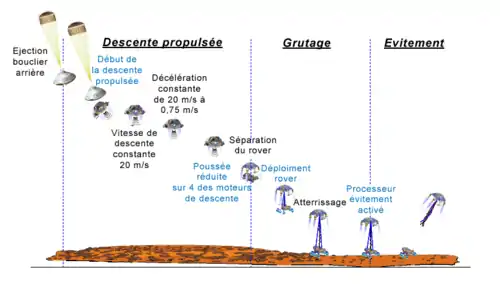
La dépose sur le sol


La dernière phase de la descente met en œuvre une technique complètement nouvelle. Alors que la sonde se trouve à 21 mètres au-dessus du sol avec une vitesse horizontale nulle et une vitesse verticale descendante constante limitée à 0,75 m/s, le rover est descendu au bout de trois câbles longs de 7,50 mètres tout en déployant ses roues puis est libéré dès que le système qui pilote la descente détecte que les forces de traction exercées sur les câbles se sont affaiblies, en conséquence de la dépose effective du rover. Ceci permet une prise de contact à faible vitesse du rover qui est placé au sol sur ses roues en configuration opérationnelle. Les amortisseurs du véhicule sont utilisés pour amortir le contact.
Un système pyrotechnique désolidarise le rover de l'étage de descente alors que l'altitude est de 17,6 mètres. Le rover descend suspendu au bout des 3 câbles qui exercent leur traction près du barycentre de l'étage de descente pour éviter de perturber l'équilibre de celui-ci. En parallèle, les roues du rover sont déployées. Un cordon ombilical relie par ailleurs le rover dont l'ordinateur contrôle le déroulement de l'opération et l'étage de descente. Sept secondes après le début de cette séquence, les câbles sont complètement déroulés. Durant les 2 secondes qui suivent, le système a pour objectif d'amortir les mouvements provoqués par l'interruption du déroulement des câbles. Le système est alors prêt pour la prise du contact avec le sol. Celle-ci est détectée lorsque la traction sur les câbles diminue imposant une réduction importante de la poussée exercée par les moteurs pour maintenir une vitesse de descente constante. L'ordinateur de bord étudie sur une période d'une seconde l'évolution du comportement de l'étage de descente (valeur de la poussée des moteurs et variation de celle-ci), et en déduit que le rover est correctement posé sur le sol. Lorsque le contact avec le sol est confirmé, l'ordre de couper les suspentes au niveau du rover est donné. Puis l'étage de descente, désormais piloté par son propre processeur, entame une manœuvre qui doit l'écarter de la zone d'atterrissage : la poussée des moteurs est augmentée durant un certain laps de temps pour que l'étage de descente reprenne de l'altitude puis celui-ci modifie son orientation de 45° et ensuite augmente la poussée de ses moteurs jusqu'à 100 % et maintient ce mode de fonctionnement jusqu'à épuisement du carburant. Il est prévu que dans tous les cas de figure l'étage de descente s'écrasera à au moins 150 mètres du lieu d'atterrissage du rover[89].
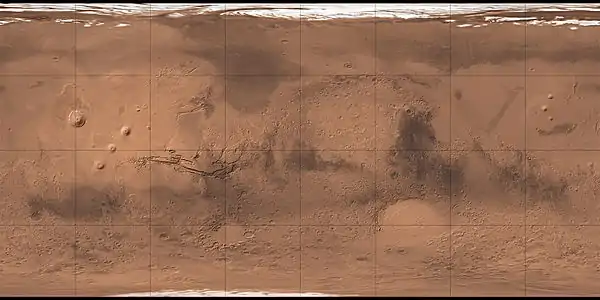
Position de Curiosity par rapport aux autres sondes spatiales ayant atterri sur Mars.
Activation du rover
Du fait de son système de dépose au sol, Curiosity est pratiquement opérationnel dès son arrivée sur le sol martien : ses roues sont déployées et il n'a pas à débarquer d'une plateforme comme les rovers MER qui l'ont précédé. Toutefois, immédiatement après son arrivée au sol, les ingénieurs au sol doivent s'assurer grâce aux capteurs embarqués sur le rover que celui-ci n'est pas dans une position périlleuse avant tout mouvement. Bien que sa garde au sol soit de 60 cm et qu'il puisse monter des pentes de 50°, les premières manœuvres peuvent être délicates si la zone d'atterrissage s'avère peu propice. Le rover entame une séquence de tâches automatiques : le mât ainsi que l'antenne grand gain sont mis en position verticale, les télécommunications avec la Terre sont testées, des images sont envoyées pour permettre aux contrôleurs au sol d'identifier précisément le site d'atterrissage et la position du rover. Le premier déplacement du rover n'intervient qu'au bout d'une semaine[90].
Planning
Au bout d'environ une semaine, Curiosity entame sa mission opérationnelle. La durée initiale de celle-ci est d'une année martienne soit 687 jours terrestres ou 669 jours martiens (sols). Durant cette période, le rover aura une activité réduite une vingtaine de jours durant la conjonction solaire du (télécommunications interrompues car le Soleil s'interpose entre Mars et la Terre) et environ 10 jours pour permettre des mises à jour des logiciels. Le rover devrait parcourir durant ces 22 mois terrestres de 5 à 20 km. Au cours de ses déplacements, il est prévu qu'il collecte et analyse environ 70 échantillons de roche et de sol martien[91],[92].
| Date | Jour de la mission | Activité |
|---|---|---|
| 5h24 UTC | Sol 0 | Début de la rentrée atmosphérique. La vitesse de MSL est de 5,9 km/s (~Mach 17). |
| 5h31 UTC[Note 19] | Sol 0 | Atterrissage dans le cratère Gale après une descente de 7 minutes. Pour le rover, il est 15 heures (heure solaire locale) |
| Sol 0 | Transmission d'informations sur le statut du rover. Premières photos au format vignette prises par les caméras HazCam. | |
| Sol 1 | Déploiement de l'antenne à grand gain, collecte de données scientifiques sur la météorologie (instrument REMS) et le niveau de radiation (RAD), prises de photos complémentaires. Vérification du fonctionnement des systèmes et des instruments. Contrôle comportement thermique[94],[95]. | |
| Sol 2 | Déploiement du mât, panorama 360° avec la caméra NavCam, Photo de la mire de calibrage avec la caméra MastCam, deuxième tentative de liaison directe avec la Terre[96]. | |
| Sol 3 | Préparation de la mise à jour du logiciel embarqué, tests de plusieurs instruments scientifiques tels que APXS, CheMin, DAN, et SAM, réalisation d'un panorama en couleurs avec la MastCam[96] | |
| Sol 4 | Préparation de la mise à jour du logiciel embarqué (suite), utilisation des instruments RAD et DAN en mode passif[96]. | |
| 11 au ~ | Sol 5 à ~Sol 8 | Mise à jour du logiciel embarqué. La version 9 conçue pour la phase de vol est remplacée par la version 10. Celle-ci a été préchargée durant le vol mais elle doit être testée avant mise en application[96]. |
| Sol 16 | Premiers déplacements du rover (3 mètres en avant, rotation de 90° puis 2 mètres en arrière) | |
| - | Première utilisation du bras porte-outils | |
| Sol 22 | Le rover se dirige vers le premier site étudié Glenelg à 400 m du point d'atterrissage. | |
| Sol 669 | Fin de la mission au bout d'une année martienne (687 jours terrestres, 669 jours martiens) |
Organisation des équipes sur Terre
L'organisation des équipes sur Terre évolue au fur et à mesure de l'avancement de la mission. Elle reproduit ce qui avait été mis en place pour les rovers MER. Durant les 90 premiers jours, les équipes travaillent 24 heures sur 24 et 7 jours sur 7 à l'heure martienne, c'est-à-dire en avançant l'heure de 40 minutes par jour. La préparation et le suivi des opérations du jour sont effectués en 16 heures par deux équipes se relayant. Durant cette période, la majorité des techniciens et des scientifiques concernés sont rassemblés sur un seul site. Les équipes ont pour objectif de roder l'organisation, maîtriser l'utilisation du rover afin de réduire progressivement la durée des tâches de préparation des opérations du jour et de suivi à 8 heures. Cette phase doit aboutir à un mode de fonctionnement décentralisé dans lequel scientifiques et techniciens peuvent travailler depuis les locaux de leur institution (laboratoire de recherche, université, entreprise, centre de la NASA). Durant la phase suivante, d'une durée de 90 jours, les équipes travaillent 7 jours sur 7, 16 heures par jour de 6 heures à 20 heures (heure du Pacifique), donc ne sont plus calés sur l'heure martienne. Par la suite, les horaires de travail de l'équipe de suivi sont normalisés : 5 jours par semaine et 8 heures par jour[97].
Pour accomplir l'ensemble des tâches de préparation, de gestion et d'exploitation associées à la mission, plusieurs équipes sont mises en place : Conduite de mission, Planification, Conception et navigation, Opérations en temps réel, Opérations d'ingénierie (c'est-à-dire portant sur le fonctionnement du rover), Opérations scientifiques. Les opérations scientifiques et ingénierie ont deux composantes : court terme c'est-à-dire concernant le jour suivant ou quelques jours au plus) et stratégique (long terme)[97].
Les activités du rover
Caractéristiques du cratère Gale
Le rover doit être déposé à l'intérieur du cratère Gale par 4,6° de latitude sud et 137,4° de longitude Est. Ce cratère de 154 km de diamètre comporte en son centre l'Aeolis Mons, un pic qui culmine à 5 kilomètres au-dessus de son plancher[Note 20]. Les pentes de cette montagne sont suffisamment douces pour que le rover puisse l'escalader mais Curiosity ne devrait gravir que ses contreforts durant sa mission nominale dont la durée est fixée à deux ans (soit une année martienne). Plusieurs indices, fournis par les instruments des satellites en orbite autour de Mars donnent à penser que l'eau a circulé autrefois dans le cratère[98] :
- la faible altitude du plancher du cratère (4,45 km au-dessous du niveau moyen) : si de l'eau a circulé à la surface de Mars, elle s'est concentrée dans les parties les plus basses.
- la présence de sulfates et d'argiles dans les parties les plus basses du pic central,
- dans des zones plus élevées l'existence de terrains fracturés comblés par des eaux saturées en minéraux.
Les strates visibles sur le mont central permettent de penser que celui-ci constitue un témoin de l'histoire géologique de la planète depuis l'impact qui a créé le cratère il y a environ 3 milliards d'années. On devrait y retrouver superposés les dépôts laissés par chaque période : les couches les plus anciennes devraient se situer à la base de la montagne. Les processus ayant abouti aux différentes formations observées ne sont toutefois pas identifiés de manière certaine[98],[99].
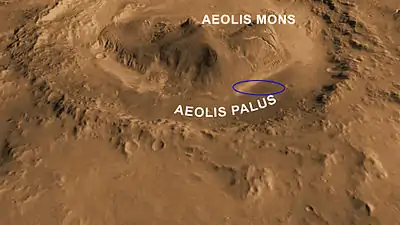 La zone d'atterrissage dans le cratère de Gale est une ellipse (20 × 8 km) située dans une zone de plaine baptisée Aeolis Palus au pied du pic central Aeolis Mons qui culmine à 5 km au-dessus du plancher du cratère.
La zone d'atterrissage dans le cratère de Gale est une ellipse (20 × 8 km) située dans une zone de plaine baptisée Aeolis Palus au pied du pic central Aeolis Mons qui culmine à 5 km au-dessus du plancher du cratère.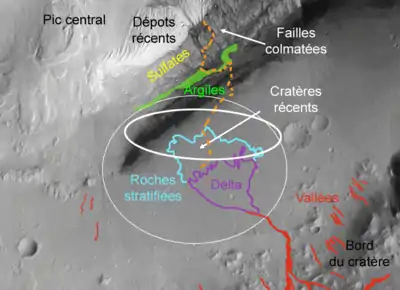 Vue détaillée avec éléments géologiques identifiés et en pointillé orange une trajectoire possible pour le rover. Le cercle blanc est le contour de la zone d'atterrissage envisagée initialement et l'ovale en trait blanc épais, la zone d'atterrissage réduite résultant d'une optimisation de la technique d'atterrissage mise au point par la suite.
Vue détaillée avec éléments géologiques identifiés et en pointillé orange une trajectoire possible pour le rover. Le cercle blanc est le contour de la zone d'atterrissage envisagée initialement et l'ovale en trait blanc épais, la zone d'atterrissage réduite résultant d'une optimisation de la technique d'atterrissage mise au point par la suite.
Déroulement
Les zones du cratère qui intéressent en premier lieu les scientifiques sont situées sur les flancs du mont central à l'extérieur de la zone d'atterrissage du rover ; celui-ci ne pouvait pas y atterrir directement car la pente est trop importante. Mais Curiosity dispose, de manière nominale, d'une autonomie de 20 km suffisante pour lui permettre d'atteindre ces lieux. Par ailleurs des sites géologiques intéressants ont également été identifiés à l'intérieur de la zone d'atterrissage. L'équipe scientifique a planifié l'exploration détaillée des formations suivantes (cf carte ci-dessus)[100] :
- le delta alluvial situé dans la zone d'atterrissage et qui s'étend entre les parois du cratère et le nord de la zone. On devrait y trouver des matériaux en provenance des flancs du cratère transportés à l'époque par les eaux de surface.
- une zone en pente, située au sud du delta alluvial, et composée de roches dures aux tonalités claires. Il pourrait s'agir de roches sédimentaires créées par l'action des eaux de surface tels que des sels déposés par un lac durant son assèchement.
- les parties basses du mont central qui comportent des strates contenant des argiles, des sulfates ou un mélange des deux. Les variations observées entre les différentes strates fourniront des informations sur les changements intervenus dans l'environnement martien à cette époque humide et chaude. Les analyses effectuées par les instruments du rover doivent également contribuer à valider l'interprétation des observations effectuées par les orbiteurs sur la distribution et l'abondance des minéraux. Les sels de sulfate contiennent des traces d'eau au sein de la structure minérale et une partie de cette eau est libérée dans l'atmosphère aux heures les plus chaudes de la journée puis est absorbée durant les heures les plus froides ; les mesures que le rover effectuera, devraient fournir des informations sur le cycle de l'eau actuel de la planète.
- les canyons qui entaillent le flanc nord du mont central résultent de l'écoulement passé de l'eau de surface à travers les strates inférieures. Ces canyons constituent un environnement habitable distinct et postérieur à ceux associés à l'époque de la formation des argiles et des sulfates. L'analyse des dépôts au débouché des canyons nous renseignera sur les conditions régnant sur Mars à cette époque.
- le réseau de fractures situé dans la partie supérieure des strates riches en sulfates est comblé par des matériaux minéraux résultant de l'action des eaux de surface. Il s'agit des vestiges d'un troisième environnement distinct des deux précédents. Le rover recherchera des composants organiques dans ces dépôts.
La vitesse de progression du rover dépendra des découvertes effectuées sur chaque site. Si le rover est toujours opérationnel après avoir exploré ces différentes formations, il est prévu de l'envoyer étudier les strates supérieures (situées plus haut sur le pic central) correspondant à des époques plus récentes de l'histoire de Mars[100].
Les contraintes
Les opérations sur le sol de Mars doivent prendre en compte plusieurs contraintes :
Énergie disponible et contrainte sur le volume de données scientifiques générées
Le rover ne peut consacrer que 250 watts d'énergie aux équipements scientifiques. Durant l'hiver martien, lorsque la température chute, la puissance disponible est encore inférieure car il faut consacrer plus d'énergie pour maintenir les équipements sensibles à une température suffisante. Toutefois la latitude du site retenu (le cratère Gale), proche de l'équateur, permet au rover de bénéficier d'une température relativement clémente comprise entre −100 et 0 °C[53]. Durant une journée martienne, le temps d'activité du rover est limité à 6 heures. La quantité de données scientifiques qui peut être transmise a été limitée en moyenne à 250 mégabits par jour martien pour tenir compte de la disponibilité des satellites chargés des liaisons avec la Terre[92].
Autonomie
Le rover n'est généralement pas capable d'enchaîner les opérations et doit recevoir des instructions des opérateurs sur Terre pour entamer une nouvelle tâche[101] :
- les activités scientifiques à mener sont conditionnées par plusieurs observations préalables effectuées à l'aide de différents instruments (par exemple caméra de navigation puis caméra scientifique puis ChemCam) entre lesquelles s'intercalent une analyse par les scientifiques sur Terre pour identifier les cibles intéressantes et définir en conséquence l'étape suivante.
- lorsque le rover est en route pour un autre site, il dispose de logiciels lui permettant de progresser de manière autonome en interprétant les images fournies par ses caméras de navigation. Mais sa progression doit être très prudente, car la capacité d'identifier les obstacles est limitée et en cas d'enlisement, de retournement ou de choc endommageant un des mécanismes ou des instruments, aucune réparation n'étant possible. Or, le terrain martien est irrégulier et les zones géologiques intéressantes sont souvent situées dans des lieux escarpés.
Temps de réponse des équipes sur Terre
Le rover dépend donc fortement des échanges avec les équipes au sol pour mener ses activités. Or plusieurs facteurs freinent ces échanges[101] :
- les communications radio mettent de 8 à 42 minutes pour arriver à leur destination en fonction de la position respective des deux planètes.
- il n'est prévu que deux vacations radio par jour martien entre le rover et les contrôleurs à Terre pour plusieurs raisons : le rover dispose d'une quantité d'énergie limitée à consacrer aux télécommunications, ces échanges utilisent comme relais un des orbiteurs martiens qui doit survoler le site du rover et le réseau d'antennes de réception sur Terre a une disponibilité limitée.
- les positions respectives de la Terre, de Mars et du Soleil ne sont pas toujours favorables à ces échanges.
- au-delà des 180 premiers jours de la mission, la réactivité des opérateurs et des scientifiques sur Terre est limitée car les équipes ne sont plus disponibles 24h sur 24 et 7 jours sur 7 mais reviennent à des horaires normaux.
Les types d'activité

Les contraintes énumérées ci-dessus imposent un déroulement plutôt lent des activités. Les tâches à enchaîner au cours d'une journée martienne sont définies sur la base des éléments transmis par le rover la veille, ce qui aboutit à la définition de journée type vouée à un objectif principal : transit entre deux sites, reconnaissance, approche d'une cible, étude in situ, analyse d'un échantillon dans le mini-laboratoire.
Déplacement entre deux sites à étudier
Le rover consacre un nombre de jours important à se déplacer pour aller d'un site sélectionné par l'équipe scientifique au site suivant. Selon le scénario élaboré par l'équipe projet, la distance moyenne entre deux sites étudiés en profondeur par le rover est de 1,5 km. Pour se rendre sur un site, le rover se déplace à une vitesse moyenne estimée à 50 mètres par sol (jour martien). Cette distance dépend de la nature des terrains rencontrés. Durant les journées consacrées au déplacement, le rover commence par examiner les roches avoisinantes avec l'instrument ChemCam puis prend des images en relief de certains échantillons avec la caméra microscope MAHLI ce qui nécessite de déployer le bras du rover et donc d'avoir pris des images la veille avec les caméras de navigation pour s'assurer qu'il n'y a aucun obstacle sur la trajectoire du bras. Puis des panoramas sont réalisés avec les caméras de navigation et les caméras MastCam. Le reste de la période d'activité est consacrée au déplacement[92].
Reconnaissance d'un site
.jpg.webp)
L'activité de reconnaissance d'un site sélectionné est une journée consacrée à des tâches de préparation. L'objectif est d'obtenir des informations qui permettent à l'équipe scientifique de planifier les prochaines étapes. Le rover examine avec ChemCam des cibles désignées puis après déploiement du rover prend des images en relief avec la caméra microscope MAHLI ce qui nécessite de déployer le bras du rover et donc d'avoir pris des images la veille avec les caméras de navigation pour s'assurer qu'il n'y a aucun obstacle sur la trajectoire du bras. Puis des panoramas sont réalisés avec les caméras de navigation et les caméras MASTACM. L'instrument APXS est déployé et analyse durant toute la nuit un échantillon[92].
Positionnement près d'un échantillon de sol
Durant une journée consacrée au positionnement près d'un échantillon du sol ou d'une roche, le rover se déplace de manière que son bras soit, à l'issue de la journée, en position d'appliquer un outil ou instrument scientifique sur cette cible. Celle-ci doit avoir été identifiée la veille et se trouver à moins de 10 mètres du rover. Celui-ci démarre la journée en utilisant successivement ChemCam, APXS durant un laps de temps bref et MAHLI pour une image tridimensionnelle avant de se mettre en mouvement. À l'issue de son déplacement, les caméras de navigation et MastCam prennent des images qui sont transmises à Terre. L'instrument DAN effectue des mesures actives durant le déplacement et sur la position finale[92].
Étude d'un échantillon au contact

Une journée d'analyse d'une échantillon de sol ou de roche au contact consiste à effectuer des observations avec les instruments du bras sur la cible du rover (APSX et MAHLI) qui doit être à portée depuis la veille. La roche est ensuite brossée pour être débarrassée de la couche superficielle puis des mesures sont de nouveau effectuées avec les instruments scientifiques du bras mais cette fois avec un temps de pose plus long d'APSX[92]. ChemCam et MastCam prennent des images du spectre électromagnétique pour préciser le contexte dans lequel se situe la cible tandis que les caméras de navigation documentent ces activités[92].
Collecte et analyse d'un échantillon du sol
Une journée consacrée à l'analyse d'un échantillon du sol regroupe l'ensemble des tâches aboutissant à l'insertion de cet échantillon dans les mini laboratoires du rover CheMin et SAM. Pour éviter une contamination d'une analyse par l'analyse précédente, un premier échantillon est prélevé sur une roche proche de la cible par la foreuse et conditionné. L'échantillon qu'on souhaite effectivement analyser est ensuite à son tour prélevé, conditionné puis mis à disposition des instruments CheMin et SAM. La partie de l'échantillon qui n'est pas utilisée est déversée sur le plateau d'observation situé sur l'avant du rover et examinée par les instruments MAHLI et APXS. Cette activité se prolonge durant 3 à 5 jours pour disposer d'une quantité d'énergie suffisante pour les équipements scientifiques et compte tenu du volume de données scientifiques à transférer et du temps nécessaire aux analyses[92].
Les préparatifs de la mission
MSL du fait de sa complexité et son coût fait partie des missions phares (Flagship mission) de la NASA : c'est le plus ambitieux des projets robotiques de la NASA pour la décennie 2010 et il se compare à ce titre à la sonde Cassini-Huygens. La phase de conception du projet est lancée en 2003 et s'achève en 2007.
Un développement difficile (2004-2009)
En , soit à peine trois mois après l'atterrissage du premier rover MER, un appel à propositions est lancé par la NASA pour les instruments scientifiques embarqués à bord du rover. Huit mois plus tard huit instruments sont sélectionnés auxquels s'ajoutent les deux fournis par la Russie et l'Espagne[102]. Début la phase de conception (Critical Design Review CDR) s'achève et l'évaluation effectuée fait apparaître déjà un dépassement de 75 M$ par rapport au budget total fixé à l'époque à 1,7 G$. La Direction des missions scientifiques de la NASA (Science Mission Directorate) décide de supprimer certains équipements ne jouant pas un rôle essentiel dans l'atteinte des objectifs : la caméra de l'étage de descente MARDI et la fonction zoom des caméras de mât sont abandonnées tandis que la meule située en bout de bras est remplacée par une simple brosse[103]. La phase de développement qui suit est marquée par de nombreux problèmes qui entraînent parfois des changements importants dans la conception de la sonde et du rover. L'équipe de développement renonce très tard en 2008, faute de résultats probants, au nouveau système de lubrification à sec[Note 21] des actionneurs et des moteurs électriques : ceux-ci, en supportant des températures plus froides, devaient permettre au rover d'explorer des zones plus septentrionales de Mars comme le demandaient les scientifiques. À la suite de cette modification, tous ces composants (51 actionneurs et 54 moteurs électriques) sont fabriqués dans l'urgence, selon les spécifications révisées, par l'industriel qui ne parvient pas à tenir les délais. Violant toutes ses procédures, le JPL doit assembler en parallèle le modèle d'ingénierie et le modèle de vol du rover[Note 22]. La mise au point des logiciels de la sonde constitue l'autre source majeure de retards. Le calculateur embarqué du rover MSL, contrairement à celui des rovers MER, est complètement redondant ce qui se traduit par une complexité qui est encore accrue par la sophistication du véhicule. Comme, par ailleurs, le rover comprend un grand nombre de circuits logiques programmables et que l'ordinateur du rover prend en charge les phases de transit Terre-Mars et la descente sur le sol martien, le développement et la qualification des logiciels embarqués sont particulièrement complexes et le planning prévu n'est pas respecté.

Sur le véhicule de rentrée, les ingénieurs se rendent compte, alors que le projet est déjà très avancé, que le matériau ablatif utilisé pour les sondes spatiales MER, qui a été repris pour le bouclier thermique de MSL, n'aura pas une capacité d'évacuation de la chaleur suffisante. La NASA doit le remplacer par du PICA. Mais ce matériau n'a été utilisé qu'à une moindre échelle pour la capsule de retour d'échantillon de la sonde Stardust (81 cm de diamètre) et il est plus difficile à mettre en œuvre[Note 23]. Enfin la conception du système de prélèvement et de conditionnement des échantillons du sol martien situé au bout du bras télécommandé du rover a été plusieurs fois modifiée depuis 2006 et revue une dernière fois à la suite des déboires rencontrés par un système similaire mis en œuvre par la sonde martienne Phoenix en 2008. La qualification du bras du rover, déjà handicapée par le problème des actionneurs, a été particulièrement tardive et se poursuit en 2011[104].
Dépassements budgétaires et report du lancement (2009-2011)
En 2008, le dépassement budgétaire résultant des difficultés rencontrées durant la phase de développement est officialisé : annoncé à 24 % en , il atteint 30 % en octobre[105]. Le , la NASA décide officiellement de reporter le lancement prévu en 2009 à qui est la prochaine fenêtre de lancement permettant l'envoi d'une sonde vers Mars. La raison invoquée est que les tests ne seront pas achevés à temps. Le budget supplémentaire rendu nécessaire à la fois par les dépassements et le rallongement de la période de développement est trouvé en repoussant d'autres projets de sondes interplanétaires en particulier de celles à destinations de Mars[106],[104].
En 2009, la NASA lance un concours auprès du public pour baptiser le rover de la mission MSL. Après avoir sélectionné neuf finalistes (Journey, Wonder, Perception, Adventure, Sunrise, Curiosity, Amelia, Poursuit et Vision) sur plus de 9 000 propositions, le vote des internautes a finalement retenu le nom de Curiosity, le [107],[108],[Note 24].
 Les principaux composants de la sonde MSL assemblés pour des tests.
Les principaux composants de la sonde MSL assemblés pour des tests. Le rover en fin d'assemblage ().
Le rover en fin d'assemblage (). Pont supérieur du rover photographié par la caméra située dans le mât.
Pont supérieur du rover photographié par la caméra située dans le mât.
En , le coût total de la mission est réévalué à 2,5 milliards de dollars US sous réserve que le lancement soit effectué en 2011. Le dépassement budgétaire atteint désormais 56 % au niveau du projet global et 86 % pour la phase de développement. La qualification de plusieurs composants importants n'est toujours pas achevée : les composants concernés sont l'avionique, le fonctionnement en mode dégradé du rover et le système de collecte d'échantillons. Les performances du système de production d'énergie suscitent également des inquiétudes. Un report supplémentaire de deux ans entraînerait un surcoût estimé à 570 M$[109]. Les dernières sources de retard semblent avoir été aplanies et les composants de la sonde qui ont été transférés du JPL au centre spatial Kennedy dès sont réassemblés sur ce site et subissent une dernière batterie de tests[110]. La deuxième fenêtre de lancement vers Mars de 2011, qui débute le et se ferme le , a été retenue. Cette période est moins favorable que la fenêtre s'ouvrant en octobre car la sonde entre dans l'atmosphère de Mars avec une vitesse majorée d'environ 0,4 km/s. Le la sonde et la coiffe qui la recouvre sont hissées au sommet du lanceur Atlas V sur le pas de tir 41 de la base de lancement de Cap Canaveral[111]. Le générateur thermoélectrique à radioisotope (RTG) est installé quelques jours plus tard[Note 25],[112],[113].
Déroulement de la mission
Le lancement et le transit vers Mars (26 novembre 2011 – 6 août 2012)

Le à 15h02 UTC, soit un jour après l'ouverture de fenêtre, la sonde est lancée par une fusée Atlas V. Après la mise à feu de l'étage Centaur, elle est directement placée sur sa trajectoire vers Mars[114]. Le lanceur place la sonde dans une direction « décalée », de façon que le deuxième étage n'aille pas s'écraser sur Mars et contaminer la planète avec des micro-organismes terrestres. C'est pourquoi le , se déroule une première correction de trajectoire représentant un changement de vitesse de 5,5 m/s pour se placer dans la direction qu'occupera Mars à l'arrivée à 5 000 km près. Ainsi les petits moteurs-fusées de la sonde fonctionnent-ils durant 59 minutes. Le , une deuxième correction de 0,9 m/s place la sonde exactement dans la direction de Mars. La troisième correction effectuée le permet à la sonde d'aborder l'atmosphère martienne à la fois au bon endroit, et au bon moment : grâce à une brève impulsion des moteurs de 40 secondes, le point d'entrée dans l'atmosphère martienne est corrigé d'environ 200 km et l'heure de la rentrée atmosphérique est avancée d'environ 70 secondes[115]. La quatrième correction de trajectoire (changement de vitesse de 1 cm/s) est effectuée le et permet de corriger le point d'entrée dans l'atmosphère martienne de 21 km[116]. Les cinquième et sixième corrections de trajectoire, planifiées les 3 et , sont annulées car jugées finalement non nécessaires[117],[118].
La descente et l'atterrissage (6 août 2012)

Le , la sonde entame son entrée dans l'atmosphère de Mars. Durant la traversée de celle-ci, elle transmet en permanence des informations sur son fonctionnement, pour permettre par la suite un diagnostic en cas d'échec. La descente a été programmée de manière que les orbiteurs 2001 Mars Odyssey et Mars Reconnaissance Orbiter (MRO) puissent l'observer et en retransmettre des images. Mars Odyssey relaie immédiatement les données reçues vers les stations terrestres tandis que MRO écoute sur une plage d'ondes plus étendue, au cas où le signal émis serait perturbé[119]. Les données transmises par la sonde sont limitées par le débit très faible[Note 26]. L'orbiteur européen Mars Express est également utilisé pour relayer ses émissions. Finalement, le à 5 h 31 UTC, Curiosity atterrit comme prévu à l'intérieur de l'ellipse à 2,25 km à l'est de son centre. Le lieu d'atterrissage se trouve à 6 km du Mont Sharp (Aeolis Mons) et 28 km des rebords du cratère (ses coordonnées sont -4.5895 S, 137.4417 E). Le terrain sur lequel il s'est posé est dégagé de tout obstacle, incliné de quelques degrés, et l'avant du rover est tourné vers l'est/sud-est (112,7° plus ou moins 5°)[120].
.jpg.webp) Position des 17 caméras installées sur le rover.
Position des 17 caméras installées sur le rover. Le bouclier thermique (avant) photographié par la caméra MARDI du rover trois secondes après son largage durant la descente vers le sol martien.
Le bouclier thermique (avant) photographié par la caméra MARDI du rover trois secondes après son largage durant la descente vers le sol martien. MRO a réussi à photographier la sonde MSL durant sa descente en parachute.
MRO a réussi à photographier la sonde MSL durant sa descente en parachute. Les trois composants de l'étage de descente sont tous tombés sur le sol martien à faible distance de Curiosity.
Les trois composants de l'étage de descente sont tous tombés sur le sol martien à faible distance de Curiosity. Autoportrait de Curiosity réalisé avec une des caméras NavCam.
Autoportrait de Curiosity réalisé avec une des caméras NavCam. Cette photo prise avec la caméra-téléobjectif MastCam-100, montre des reliefs du Mont Sharp situés à environ 10 km.
Cette photo prise avec la caméra-téléobjectif MastCam-100, montre des reliefs du Mont Sharp situés à environ 10 km.
Exploration de Mars (août 2012 - )
Les principales étapes de l'exploration de Mars par Curiosity sont :
- le déploiement et la vérification des équipements après l'atterrissage () ;
- le déplacement vers le site de Glenelg distant d'environ 700 mètres ;
- la découverte sur place puis l'étude durant 6 mois du site de Yellowknife Bay dont des indices permettent de penser qu'il s'agit d'un ancien lac ou d'un ancien delta aux eaux non acides ;
- le rover entame en un transit rapide vers le mont Sharp ;
- fin les ingénieurs du JPL découvrent que les roues du rover ont subi des perforations non prévues sur le terrain très rocheux et décident d'adapter la route suivie par le rover en conséquence ;
- en le rover qui a parcouru 7 km se dirige rapidement vers le Mount Sharp ;
- le rover a parcouru 18,01 km à la surface de Mars à son 1930e sol[121]. () ;
- le rover a parcouru 22,65 km à la surface de Mars à son 2422e sol () ;
- le rover a parcouru 24,40 km à la surface de Mars à son 3033e sol ().
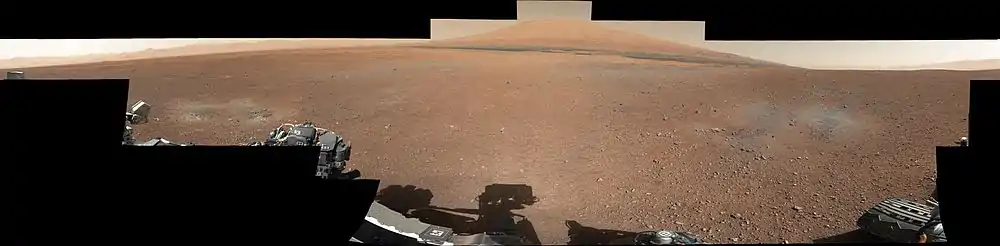
Notes et références
Notes
- Une mission habitée vers Mars aurait au minimum une durée de 500 jours. Pour avoir un retour scientifique à la hauteur de l'investissement effectué il faudrait en fait compter 900 jours (deux ans et demi dont un et demi sur place). Selon le scénario étudié par la NASA, un tel projet nécessiterait de placer plus de 1 000 tonnes en orbite basse là où le programme Apollo ne nécessitait qu'une centaine de tonnes. Sur le plan technique, on ne sait ni protéger un équipage humain des radiations mortelles qu'il subirait durant son transit entre la Terre et Mars ni faire atterrir un engin dépassant la tonne sur le sol martien.
- En octobre 2013 le rover Opportunity a parcouru 38,5 km (Spirit 7,7 km) et est toujours opérationnel.
- Le 21 octobre 2013, le rover Opportunity est toujours opérationnel 3 460 jours après avoir atterri (Spirit : 2210 jours).
- Ce coût incluait un orbiteur de type MRO chargé de repérer les zones géologiques intéressantes, un rover chargé d'effectuer des prélèvements et un engin chargé de ramener l'échantillon de sol sur Terre.
- Le coût du projet de retour d'échantillon estimé initialement à 650 millions de dollars est réévalué à plus de 2 milliards de dollars.
- La dernière mouture de ce projet est NetLander lancé en 2007 par le CNES et l'ESA mais abandonné en 2009 pour des raisons budgétaires.
- la précédente mission du programme Flagship était Cassini-Huygens (1997) et la mission suivante programmée vers 2020 pourrait être Europa Jupiter System Mission mais est aujourd'hui suspendue faute de budget.
- Bien que quatre fois plus lourde que les sondes MER, l'étage de croisière MSL n'emporte qu'une fois et demi la quantité de carburant des MER car le lanceur Atlas V injecte la sonde avec une meilleure précision que la Delta II.
- La coiffe du lanceur Atlas V permet de lancer un engin de 5 m de diamètre mais les installations de lancement de Cape Canaveral restreignent cette valeur à 4,5 m.
- Avec un rover de plus d'une tonne la sonde subirait un freinage moins efficace et arriverait trop vite sur le sol martien.
- L'impulsion spécifique des moteurs de l'étage de descente est de 210 secondes.
- Le rendement électrique d'un GTR est très faible et près de 95 % de l'énergie est dissipée sous forme thermique (2 000 W thermiques pour 110 W électriques).
- Odyssey, plus ancien que MRO, ne sera peut-être plus opérationnel au moment de la mission de MSL.
- Le lanceur Atlas V 541 permet d'atteindre une vitesse de libération <20,1 km/s avec une charge utile pesant 4,05 tonnes.
- Il faut compter au moins 78 jours après le lancement de Juno pour préparer le lancement de MSL.
- Cette aptitude n'est pas exploitée car le cratère Gale est situé à une altitude négative. Mais ce choix n'était pas fixé à la conception de la sonde.
- La finesse générée (rapport portance sur traînée) est de 0,24 contre 0 pour le véhicule de rentrée des rovers MER.
- À cette vitesse il n'y a plus de risque que le bouclier du fait de sa traînée entre en contact après son éjection avec la sonde. L'éjection est déclenchée par des ressorts.
- 7h31 en Belgique, France et Suisse, 1h31 au Québec.
- Le rover se pose au nord du pic central dans une plaine limitée par les murs du cratère qui a été baptisée Aeolis Palus.
- Les pièces sont développées en titane qui remplace l'acier sans étain.
- Le modèle d'ingénierie est une copie de la sonde destinée à valider les composants assemblés tandis que le module de vol est l'exemplaire de la sonde qui doit être lancé.
- Le bouclier n'est plus d'une pièce mais constitué d'une multitude de tuiles comme sur la navette spatiale américaine.
- Ce nom a été proposé par une jeune fille de 12 ans, Clara Ma dont voici l’essai justifiant ce choix :
« La curiosité est une flamme éternelle qui brûle dans tous les esprits. Elle me pousse hors du lit le matin et m’interroge sur les surprises que la vie me lancera en ce jour. La curiosité est une force tellement puissante. Sans elle, nous ne serions pas ce que nous sommes aujourd’hui. Quand j’étais plus jeune, je me demandais « Pourquoi le ciel est-il bleu ? », « Pourquoi les étoiles scintillent-elles ? », « Pourquoi suis-je moi ? », et je m’interroge encore. J’ai tellement de questions, et l’Amérique est le lieu où je veux trouver mes réponses. La curiosité est la passion qui nous pousse dans notre vie de tous les jours. Ce besoin de poser des questions, de s’émerveiller, a fait de nous des explorateurs et des scientifiques. Bien sûr, il y a beaucoup de risques et de dangers, mais malgré cela, nous continuons toujours à nous interroger et à rêver, à créer et à espérer. Nous avons déjà tant découvert sur le monde, mais nous en savons en fait tellement peu. Nous ne saurons jamais tout ce qu’il y a à savoir, mais grâce à notre flamme de curiosité, nous avons tant appris »
. - Le générateur RTG est installé peu avant le lancement car il produit beaucoup de chaleur qui est plus difficile à évacuer lorsque la sonde est placée sous la coiffe (lorsque la sonde est en route vers Mars, cette chaleur est évacuée via les radiateurs de l'étage de croisière). Le RTG est installé au sommet de la fusée en passant par deux ouvertures ; l'une pratiquée dans la coiffe et la seconde dans le bouclier arrière de la sonde.
- Durant sa descente, comme elle ne peut pas pointer vers la Terre une antenne à grand gain qui permettrait de transmettre des données avec un débit élevé,.
Références
- Frédéric W. Taylor op. cit. p. 133.
- http://www.esa.int/SPECIALS/Mars_Express/SEMGKA808BE_0.html.
- NASA launch press kit, op. cit. p. 56-58.
- (en) R. Braun et R Manning, Mars Exploration Entry, Descent and Landing Challenges, (lire en ligne), p. 16.
- NASA launch press kit, op. cit. p. 36.
- Frédéric W. Taylor op. cit. p. 259-262.
- Frédéric W. Taylor op. cit. p. 262.
- Frédéric W. Taylor op. cit. p. 263-266.
- (en) Mars Science Program Synthesis Group, « Mars Exploration Strategy 2009 – 2020 WHITE PAPER », .
- (en) « Mars Science Laboratory: Mission », NASA/JPL (consulté le ) .
- (en) « Science Objectives of the MSL »(Archive • Wikiwix • Archive.is • Google • Que faire ?), JPL, NASA (consulté le ) .
- (en) Mars Science Laboratory Mission Profile .
- (en) MSL — Landing Sites Workshop .
- « Survivor: Mars — Seven Possible MSL Landing Sites », Jet Propulsion Laboratory, NASA, (lire en ligne, consulté le ).
- (en) « MSL Workshop Summary » [PDF], (consulté le ).
- (en) « MSL Landing Site Selection User’s Guide to Engineering Constraints » [PDF], (consulté le ).
- (en) « Second MSL Landing Site Workshop ».
- (en) « Second MSL Landing Site Workshop results ».
- (en) « MSL Workshop Voting Chart » [PDF], .
- (en) GuyMac, « Reconnaissance of MSL Sites », HiBlog, (consulté le ).
- (en) « Mars Exploration Science Monthly Newsletter » [PDF], .
- (en) « Site List Narrows For NASA's Next Mars Landing », MarsToday.com, (consulté le ).
- (en) « Final_Quad_Charts_for_5th_MSL_Workshop_5-26-11 », NASA (consulté le ).
- (en) « Looking at Landing Sites for the Mars Science Laboratory », YouTube, NASA/JPL, (consulté le ).
- (en) Recherche de sites d'atterrissage additionnels pour Mars Science Laboratory .
- (en) Calendrier des réunions de travail du MEPAG, dont celles de la mission Mars Science Laboratory .
- (en) « Mars Rover Site Selection Down to Two Finalists », NASA, .
- (en) « NASA's Next Mars Rover to Land at Gale Crater », NASA, .
- (en) « MSL Science Corner : Instruments », NASA/JPL (consulté le ).
- (en) « Mars Science Laboratory (MSL) Mars Hand Lens Imager (MAHLI) Instrument Description », MALIN SPACE Science Systems (consulté le ).
- (en) « MSL Science Corner : Mars Hand Lens Imager (MAHLI) », NASA/JPL (consulté le ).
- NASA launch press kit, op. cit. p. 11-12.
- (en) « Mars Science Laboratory (MSL) Mast Camera (MastCam) Instrument Description », MALIN SPACE Science Systems (consulté le ).
- (en) « MSL Science Corner : Mast Camera (MastCam) », NASA/JPL (consulté le ).
- (en) « Mars Science Laboratory (MSL) Mars Descent Imager (MARDI) Instrument Description », MALIN SPACE Science Systems (consulté le ) .
- (en) « MSL Science Corner : Mars Descent Imager (MARDI) », NASA/JPL (consulté le ) .
- Le robot Curiosity embarque deux instruments français : ChemCam repose sur un laser, mis au point par la société Thales Laser, Le figaro, novembre 2011.
- (en) « MSL Science Corner : Chemistry & Camera (ChemCam) », NASA/JPL (consulté le ).
- (en) « MSL Science Corner : Alpha Particle X-ray Spectrometer (APXS) », NASA/JPL (consulté le ) .
- (en) « MSL Science Corner : Chemistry & Mineralogy (CheMin) », NASA/JPL (consulté le ) .
- (en) « MSL Science Corner: Sample Analysis at Mars (SAM) », NASA/JPL (consulté le ) .
- « suite instrumentale du SAM et actu »(Archive • Wikiwix • Archive.is • Google • Que faire ?) (consulté le )sur SAM GC. consulté le 19/09/11.
- sur NASA. consulté le 19/09/11.
- (en) « MSL Science Corner : Radiation Assessment Detector (RAD) », NASA/JPL (consulté le ) .
- (en) D. M. Hassler et al., « The Radiation Assessment Detector (RAD) on the Mars Science Laboratory » (consulté en ) .
- (en) « MSL Science Corner : Dynamic Albedo of Neutrons (DAN) », NASA/JPL (consulté le ) .
- (en) « MSL Science Corner : Rover Environmental Monitoring Station (REMS) », NASA/JPL (consulté le ) .
- (en) « MSL EDL Instrument », NASA/JPL (consulté le ) .
- NASA launch press kit, op. cit. p. 44-45.
- The Design and Engineering of Curiosity How the Mars Rover Performs Its Job, p. 2.2.1.
- The Design and Engineering of Curiosity How the Mars Rover Performs Its Job, p. 2.3.2.
- The Design and Engineering of Curiosity How the Mars Rover Performs Its Job, p. 2.3.6.
- NASA launch press kit, op. cit. p. 6.
- (en) « Cruise Configuration », NASA/JPL (consulté le ) .
- (en) Nancy Atkinson, « How Will MSL Navigate to Mars? Very Precisely » (consulté le ) .
- NASA launch press kit, op. cit. p. 37-38.
- NASA launch press kit, op. cit. p. 38-39.
- R. Braun et R Manning, op. cit. p. 6-7.
- (en) « Aerojet Ships Propulsion System For Mars Science Laboratory Mission », sur Marsdayly, .
- (en) Miguel San Martin (NASA/PL), « The MSL SkyCrane Landing Architecture : A GN&C Perspective », 14-18 juin 2010 .
- (en) Adam D. Steltzner et all (NASA/PL), « Mars Science Laboratory Entry, Descent, and Landing System Overview », .
- (en) « Mission : rover - Wheels and Legs », sur NASA JPL - Mars Program (consulté le ) .
- (en) U.S. Department of Energy – janvier 2008 « Space Radioisotope Power Systems – Multi-Mission Radioisotope Thermoelectric Generator. » .
- (en) 4th International Energy Conversion Engineering Conference and Exhibit (IECEC) – 26-29 juin 2006 Ajay K. Misra, « Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power. » .
- (en) BAE Systems – 2008 « RAD750® radiation-hardened PowerPC microprocessor. » .
- NASA launch press kit, op. cit. p. 44.
- (en) « MSL Science Corner : Sampling system », NASA/JPL (consulté le ).
- (en) Louise Jandura, « Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges » (consulté le ) .
- (en) NASA, « MSL Science corner : sampling system » (consulté le ) .
- Andre Makovsky et al., op. cit. p. 81-82.
- Andre Makovsky et al., op. cit. p. 62-65.
- Andre Makovsky et all, op. cit. p. 117-121.
- (en) « Spacecraft - Eyes and Other Senses », NASA/JPS (consulté le ) .
- NASA launch press kit, op. cit. p. 38.
- (en) NASA Jet Propulsion Laboratory Caltech – 20 mai 2010 « Geometry Drives Selection Date for 2011 Mars Launch. ».
- F. Abilleira, op. cit. p. 3-11.
- F. Abilleira, op. cit. p. 3.
- (en) « MSL - Mission : Cruise », sur NASA/JPL (consulté le ).
- F. Abilleira, op. cit. p. 13-15.
- (en) « MSL - Mission : Approach », sur NASA/JPL (consulté le ).
- (en) Emily Lakdawalla, « How Curiosity Will Land on Mars, Part 1: Entry », sur The planetary society, .
- (en) Emily Lakdawalla, « How Curiosity Will Land on Mars, Part 3: Skycrane and landing », sur The planetary society, .
- (en) Brian Kent Birge III, « A Computational Intelligence Approach to the Mars Precision Landing Problem »(Archive • Wikiwix • Archive.is • Google • Que faire ?).
- F. Abilleira, op. cit. p. 14.
- Adam D. Steltzner et al., op. cit. p. 4-5.
- Adam D. Steltzner et all, op. cit. p. 5-7.
- Adam D. Steltzner et al., op. cit. p. 7-9.
- Adam D. Steltzner et all, op. cit. p. 9-10 .
- Adam D. Steltzner et al., op. cit. p. 10-12.
- (en) « MSL - Mission : First Drive », sur NASA/JPL (consulté le ).
- (en) « MSL - Mission : Surface operations », sur NASA/JPL (consulté le ).
- (en) « MSL Science corner : Science Planning », NASA/JPL (consulté le ) .
- NASA landing press kit, op. cit. p. 30-33.
- (en) « Curiosity's Daily Update: Curiosity Safely on Mars! Health Checks Begin », .
- (en) Emily Lakdawalla, « Curiosity: Notes from the two day-after-landing press briefings », .
- (en) Emily Lakdawalla, « Curiosity sol 1 and planned activities for the next few sols », .
- (en) « MSL Science corner : Science Opérations », NASA/JPL (consulté le ) .
- NASA launch press kit, op. cit. p. 48.
- NASA R.B. Anderson et all (2010), op. cit. p. 76-77.
- NASA launch press kit, op. cit. p. 49-50.
- (en) Jeffrey J. Biesiadecki, P. Chris Leger et MarkW. Maimone (NASA / JPL), « Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers », .
- NASA launch press kit, op. cit. p. 10-11.
- (en) « Mars Science Laboratory Project Changes Respond to Cost Increases, Keep Mars Program On Track », sur NASA/JPL, .
- (en) « Mars Science Laboratory: the technical reasons behind its delay », The Space Review, (consulté le ).
- (en) Frank Morring et Jefferson Morris, « Mars Science Lab In Doubt », Aviation Week, (lire en ligne[archive du ], consulté le ).
- (en) « Mars Science Laboratory: the budgetary reasons behind its delay », The Space Review, (consulté le ).
- (en) Communiqué de presse, « NASA Selects Student's Entry as New Mars Rover Name », sur nasa.gov, (consulté le ).
- (en) Clara Ma, « CURIOSITY », sur nasa.gov, (consulté le ).
- (en) NASA Office of audit, « NASA's Management of the Mars Science Laboratory Project (audit 1er trim 2011) », .
- (en) NASA/JPL, « NASA Mars Rover Arrives in Florida After Cross-Country Flight », .
- (en). (en) NASA/JPL, « Curiosity: Expendable Launch Vehicle Status Report », .
- (en) NASA/JPL, « Expendable Launch Vehicle Status Report », .
- (en) Emily Lakdawalla, « Curiosity stacked for launch, still waiting for plutonium power source installation », .
- (en) « NASA Launches Most Capable and Robust Rover To Mars », NASA/JPL, .
- NASA landing press kit, op. cit. p. 26-27.
- (en) « Curiosity's Daily Update: Course Maneuver Successful; MSL Begins Final Approach », NASA/JPL, .
- (en) « Curiosity's Daily Update: MSL Right on Course - TCM-5 Cancelled », NASA/JPL, .
- (en) « Curiosity Rover Just Hours from Mars Landing », NASA/JPL, .
- (en) Emily Lakdawalla, « Curiosity: Landing minus 11 hours », .
- (en) Emily Lakdawalla, « Curiosity: Notes from the two day-after-landing press briefings », .
- mars.nasa.gov, « Curiosity's Traverse Map Through Sol 1930 - Mars Science Laboratory », sur mars.nasa.gov, (consulté le ).
Sources
- NASA
- (en) NASA, Mars Science Laboratory Landing, (lire en ligne)Document de présentation à la presse de la mission préparé pour l'atterrissage de la sonde spatiale.
- (en) NASA, Mars Science Laboratory launch press kit, (lire en ligne)Document de présentation à la presse de la mission préparé pour le lancement de la sonde spatiale.
- (en) Adam D. Steltzner et al., Mars Science Laboratory Entry, Descent, and Landing System Overview, (lire en ligne)Description du scénario d'atterrissage de MSL sur Mars.
- (en) Andre Makovsky, Peter Ilott et Jim Taylor (NASA/JPL), Mars Science Laboratory Telecommunications System Design, (lire en ligne)Caractéristiques des systèmes de télécommunications de MSL.
- (en) NASA/JPL, MSL Landing Site Selection User’s Guide to Engineering Constraints, (lire en ligne)Contraintes techniques auxquelles doit répondre le site d'atterrissage de MSL.
- (en) Louise Jandura (NASA/JPL), Mars Science Laboratory Sample Acquisition, Sample Processing and Handling : Subsystem Design and Test Challenges, (lire en ligne)Conception du système de prélèvement d'échantillon de MSL.
- (en) R. Braun et R Manning, Mars Exploration Entry, Descent and Landing Challenges, (lire en ligne)Description technique du problème soulevé par l'atterrissage sur Mars (EDL) et des solutions techniques envisageables.
- (en) NASA Office of audit, NASA's Management of the Mars Science Laboratory Project (audit 1er trim. 2011), (lire en ligne)Audit interne (NASA) du projet MSL publié en juin 2011.
- (en) F. Abilleira (NASA/JPL), 2011 Mars Science Laboratory Mission Design Overview, (lire en ligne)Description des contraintes affectant le lancement et scénario du vol Terre-Mars.
- Mission scientifique et description des instruments
- (en) John P. Grotzinger et al., « Mars Science Laboratory Mission and Science Investigation », Space Science Reviews, (DOI 0.1007/s11214-012-9892-2, lire en ligne)Présentation de la mission scientifique de MSL.
- (en) J. Gómez-Elvira et al., « REMS: The Environmental Sensor Suite for the Mars Science Laboratory Rover », Space Science Reviews, (DOI 10.2307/2118559, lire en ligne)Description de l'instrument REMS.
- (en) Paul R. Mahaffy et al., « The Sample Analysis at Mars Investigation and Instrument Suite Rover », Space Science Reviews, (DOI DOI 10.1007/s11214-012-9879-z, lire en ligne)Description de l'instrument SAM.
- (en) Kenneth S. Edgett et al., « Curiosity’s Mars Hand Lens Imager (MAHLI)Investigation », Space Science Reviews, (DOI 10.1007/s11214-012-9910-4, lire en ligne)Description de l'instrument MAHLI.
- (en) S. Maurice et al., « The ChemCam Instrument Suite on the Mars Science Laboratory (MSL) Rover: Science Objectives and Mast Unit Description », Space Science Reviews, (DOI 10.1007/s11214-012-9910-4)Description de la partie optique de l'instrument ChemCam.
- (en) RogerC.Wiens et al., « The ChemCam Instrument Suite on the Mars Science Laboratory (MSL) Rover: Body Unit and Combined System Tests », Space Science Reviews, vol. 170, , p. 167-227 (DOI 10.1007/s11214-012-9902-4v, lire en ligne)Description de l'ensemble de l'instrument ChemCam.
- (en) David Blake et al., « Characterization and Calibration of the CheMin Mineralogical Instrument on Mars Science Laboratory », Space Science Reviews, vol. 170, , p. 341-399 (DOI DOI 10.1007/s11214-012-9905-1, lire en ligne)Description de l'instrument CheMin.
- Géologie de Mars
- (en) Ryan B. Anderson et James F. Bell III, « Geologic mapping and characterization of Gale Crater and implications for its potential as a Mars Science Laboratory landing site », The International Journal of Mars Science and Exploration, , p. 53 (lire en ligne)Étude géologique du cratère Gale et du Mons Aeolis (2010).
Bibliographie
- (en) Roger Wiens, Red Rover, Basic Books, , 256 p. (ISBN 978-0-465-05598-2).
- (en) Rob Manning et William L. Simon, Mars Rover Curiosity : An Inside Account from Curiosity's Chief Engineer, Smithsonian Books, , 240 p. (ISBN 978-1-58834-474-8, lire en ligne).
- (en) Emily Lakdawalla, The design and engineering of Curiosity : how the Mars rover performs its job, Cham/Chichester, Springer-PRAXIS, (ISBN 978-3-319-68144-3).
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9).
- Francis Rocard, Planète rouge Dernières nouvelles de Mars (2e édition), Paris, Dunod - Quai des Sciences, 2003-2006, 257 p. (ISBN 978-2-10-049940-3 et 2-10-049940-8).
- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2).
Annexes
Articles connexes
Au sujet de Mars :
Au sujet de l'exploration de Mars :
- Exploration de Mars par Curiosity ;
- Mars 2020 successeur de MSL
- Exploration de Mars ;
- Mariner 4, premier survol de Mars (1965) ;
- Mariner 9, première mise sur orbite (1969) ;
- Viking 1 et Viking 2, premiers atterrissages (1976) ;
- Mars Pathfinder, premier rover (1997) ;
- Spirit et Opportunity, les rovers de seconde génération (à partir de 2004) ;
- Spirit et Opportunity (articles détaillés).
Liens externes
- .
- Notices dans des dictionnaires ou encyclopédies généralistes :.
- Ressources relatives à l'astronomie : .
- (en)Archives des articles sur le déroulement de la mission sur le sol martien.
- Animation décrivant l'ensemble de la mission (2011).
- (en) Site scientifique de la NASA consacré à MSL.
- (en) Site grand public du JPL consacré à MSL.
- (en) Site de la NASA consacré à la sélection du site d'atterrissage de MSL.
- (en) Présentation synthétique de la mission de MSL (NASA).
- Page consacrée à MSL sur le site du CNES.
- et Interview du responsable au CNES de la conception de l'instrument ChemCam.
- Podcast Ciel et Espace avec F Rocard du CNES.
- Curiosity - Mission à haut risque. Une présentation en français (2013), vulgarisée et détaillée, par Jean-Pierre Martin (Société astronomique de France et Société astronomique de Montgeron).
- Mars: Les nouvelles images de Curiosity dévoilent un paysage de western.
 Portail de la robotique
Portail de la robotique  Portail de l’astronautique
Portail de l’astronautique  Portail de la planète Mars
Portail de la planète Mars  Portail des années 2010
Portail des années 2010