Mécanique des contacts
La mécanique des contacts traite des calculs impliquant des corps élastiques, visco-élastiques ou plastiques lors de contacts statiques ou dynamiques. La mécanique des contacts est l’un des fondements de l’ingénierie mécanique et est indispensable pour la conception de projets sûrs et énergiquement efficaces.

Elle peut être appliquée dans différents domaines tel que le contact roue-rail, les embrayages, les freins, les pneumatiques, les paliers et roulements, les moteurs à combustion, les liaisons mécaniques, les joints, les machines de production, le soudage par ultrasons, les contacts électriques et bien d'autres. Les applications vont de l’analyse des efforts au sein d’éléments de contact et de liaison jusqu'à l'influence de la lubrification et de la géométrie sur l'usure et les frottements d'un système en passant par l'étude de systèmes nano- et microscopiques.
Historique
La mécanique des contacts est avant tout liée à Heinrich Hertz. En 1882 Hertz résout le problème impliquant un contact entre deux corps élastiques avec des surfaces courbes (voir l’article sur le contact de Hertz). Ce résultat constitue encore aujourd’hui une des bases de la mécanique des contacts. Des travaux plus précoces concernant ce thème se réfèrent à J.V. Boussinesq ainsi qu’à V. Cerruti.
Ce n’est qu’environ cent ans plus tard, en 1971, que Johnson, Kendall, et Roberts trouveront une solution similaire pour le cas des contacts adhésifs (la théorie JKR).
Des progrès dans le domaine de la mécanique des contacts dans le milieu du XXe siècle peuvent être attribuées aux noms de Bowden et Tabor. Ils ont en effet découvert que, du fait de la rugosité, la surface de contact réelle est en fait beaucoup plus petite que celle observée à l’œil nu. Cette découverte a modifié la direction de nombreuses études de tribologie de l'époque. Leurs travaux contribuèrent à de nombreuses théories sur les contacts entre les surfaces rugueuses.
On peut aussi citer dans les pionniers de ce domaine les travaux d’Archard (1957), qui a démontré qu'également dans les contacts entre des surfaces flexibles et rugueuses, la surface de contact est à peu près proportionnelle à la force normale. D'autres contributions importantes sont liées à des noms tels que Greenwood et Williamson (1966), Bush (1975) et Persson (2002). Le résultat principal de leurs travaux est que, si la surface réelle de contact d'une surface rugueuse est en général proportionnelle à la force normale, dans des conditions de micro-contact (pression, dimension), elle ne dépend que très peu de cette force.
Aujourd'hui, la plupart des études sur la mécanique des contacts s’effectue avec des programmes de simulation qui sont basés sur la méthode des éléments finis ou la méthode des moments.
Il existe un grand nombre de recherches scientifiques à ce sujet, quelques-uns se trouvent dans les livres de Laursen (2002) et Wriggers (2006) qui couvrent aussi les bases de la mécanique de contacte numérique.
Problèmes classiques de la mécanique des contacts
Contact entre une sphère élastique et un demi-espace élastique
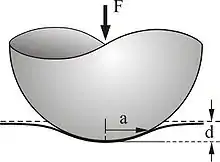
Une sphère élastique de rayon est enfoncée d'une profondeur dans un demi-espace élastique, ceci crée une zone de contact de rayon . La force nécessaire pour maintenir ce contact est égale à:



,

où
.

et ainsi que et sont respectivement les modules d'élasticité et les coefficients de Poisson des deux corps.




Voir l’article sur le contact de Hertz pour plus de précision.
Contact entre deux sphères
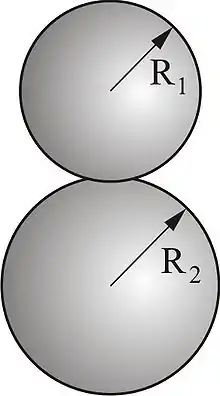
Si deux sphères de rayons et sont en contact, on peut obtenir un rayon équivalent par le calcul suivant


.

La distribution de la pression sur la zone de contact est donnée par

avec
.

La tension maximale intérieure de cisaillement se situe à pour .


Voir l’article sur le contact de Hertz pour plus de précision.
Contact entre deux cylindres croisés de même rayon
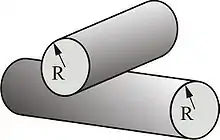
Il est équivalent au contact entre une sphère de rayon et un plan (voir ci-dessus)
Contact entre un cylindre rigide et un demi-espace élastique
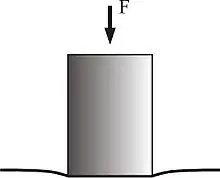
Un cylindre rigide de rayon est enfoncé dans un demi-espace élastique. On obtient la répartition de la pression avec


où
.

La relation entre la profondeur de l'enfoncement et la force normale est
.

Contact entre un solide conique rigide et un demi-espace élastique
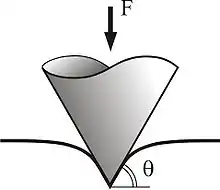
Lors du contact entre un cône rigide et un demi-espace élastique, la profondeur de l'enfoncement et le rayon de contact sont reliés par la relation suivante:

où
est l'angle entre le plan et la face latérale du cône. La répartition de la pression est de la forme

.

La contrainte à la pointe du cône (au centre de la zone de contact) a une singularité logarithmique. La force totale se calcule ainsi
.

Contact entre deux cylindres avec des axes parallèles
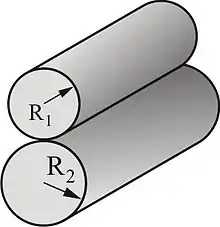
Lors d'un contact entre deux cylindres dont les axes sont parallèles, la force est linéairement proportionnelle à la profondeur de l'enfoncement :
.

Le rayon de courbure n'apparaît pas dans cette relation. La moitié de la largeur de contact devient avec la même relation :
,
avec
comme lors du contact entre deux sphères. La pression maximale est égale à
.

Contact entre deux surfaces rugueuses
Lorsque deux corps avec surface rugueuse sont pressés l'un contre l'autre, la surface de contact réelle est beaucoup plus petite que la surface de contact apparente . Lors d'un contact entre une surface "aléatoirement rugueuse" et un demi espace élastique la surface de contact réelle est proportionnelle à la force normale et est donnée par la relation suivante :




où est la moyenne quadratique de la pente de la surface et .


La pression moyenne sur la surface de contact réel

se calcule, avec une bonne approximation, comme la moitié du module d'élasticité effectif multipliée par la moyenne quadratique de la pente du profil de la surface . Cette pression est plus grande que la dureté du matériau et par conséquent


,

les micro-rugosités sont complètement à l'état plastique. Pour la surface se comporte comme lors d'un contact élastique. La valeur a été introduite par Greenwood et Williamson et fut nommé "indice de plasticité". Le fait que le système se comporte de manière élastique ou plastique ne dépend pas de la force normale appliquée.


Références
- K. L. Johnson: Contact mechanics. Cambridge University Press, 6. Nachdruck der 1. Auflage, 2001.
- Popov, Valentin L.: Kontaktmechanik und Reibung. Ein Lehr- und Anwendungsbuch von der Nanotribologie bis zur numerischen Simulation, Springer-Verlag, 2009, 328 S., (ISBN 978-3-540-88836-9).
- Popov, Valentin L.: Contact Mechanics and Friction. Physical Principles and Applications, Springer-Verlag, 2010, 362 p., (ISBN 978-3-642-10802-0)
- I. N. Sneddon: The Relation between Load and Penetration in the Axisymmetric Boussinesq Problem for a Punch of Arbitrary Profile. Int. J. Eng. Sci.,1965, v. 3, pp. 47–57.
- S. Hyun, M.O. Robbins: Elastic contact between rough surfaces: Effect of roughness at large and small wavelengths. Trobology International, 2007, v.40, pp. 1413-1422.
- T. A. Laursen: Computational Contact And Impact Mechanics: Fundamentals Of Modeling Interfacial Phenomena In Nonlinear Finite Element Analysis, Springer, 2002.
- P. Wriggers: Computational Contact Mechanics, 2. Edition, Springer, 2006.
 Portail de la physique
Portail de la physique