Protection de distance
Une protection de distance est un relais de protection destiné à surveiller l'état de certains éléments d'un réseau électrique, en particulier les lignes ou câbles haute tension, mais également les transformateurs de puissance et les générateurs. Elle a pour fonction de détecter les défauts électriques (courts-circuits sur la ligne), et de donner au disjoncteur l'ordre d'ouvrir pour mettre hors tension la ligne. Elle forme l'épine dorsale de la protection des réseaux électriques.


Selon le Vocabulaire électrotechnique international, une protection de distance est une « protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones[1] ». En pratique, elle mesure l'impédance de la ligne, si celle-ci devient faible, la protection déclenche. Ceci explique son symbole CEI : « Z< »[2].
Son nom vient de sa capacité à estimer à quelle distance du début de la ligne se trouve le court-circuit. Cette capacité permet au gestionnaire de réseau de transport de très rapidement envoyer sur le lieu précis de l'incident une équipe de maintenance pour remettre en état au plus vite, sans avoir à faire un examen complet de la ligne pour trouver le lieu du défaut. Cette capacité, associée à une remarquable sensibilité et une excellente fiabilité ont fait de la protection de distance un élément incontournable qui équipe la plupart des lignes HTB et certaines lignes HTA. Dans les lignes du réseau 400 kV de RTE on utilise par exemple soit 2 protections de distances redondantes, soit une protection de distance et une protection différentielle de ligne[3].
Principe

La protection de distance mesure deux grandeurs :
- le courant de ligne I est mesuré à l'aide d'un transformateur de courant ;
- la tension de la ligne U est mesurée à l'aide d'un transformateur de tension.
Soit une ligne électrique de longueur L (exprimée en km), d'impédance linéique Z' (exprimée en ohm/km). En temps normal l'impédance estimée : n'est pas un multiple de l'impédance de la ligne. En cas de défaut par contre, si on néglige la résistance de l'arc électrique, elle devient égale à l'impédance linéique multipliée par la distance entre l'appareil de mesure et le défaut : . Z' étant connue, l peut être déduite. Si elle est inférieure à la longueur totale de la ligne, le défaut s'y trouve. Dans ce cas, la protection déclenche, le disjoncteur associé s'ouvre[4].


Exemple

Soit une ligne 220 kV. La résistance linéique R' (exprimée en ohm/km), de réactance linéique X' (exprimée en ohm/km) :
- R'=0,1 ohm/km
- X'=0,4 ohm/km
- Z' =0,1 + j 0,4
- longueur L = 100 km
- courant maximal 1 000 A avec un facteur de puissance=0.8
En temps normal, son impédance (de charge donc) vaut :
- orientée à 37°.

Par contre, lors d'un défaut supposé en bout de ligne, l'impédance vaut
- orientée à 76°.

L'impédance est donc ici en valeur absolue plus faible en cas de défaut. L'angle est beaucoup plus élevé[5].
Intérêts et défauts
Son avantage par rapport à une protection à maximum de courant est d'être peu dépendant de l'impédance de la source et de la charge, sa sélectivité aux défauts et sa rapidité. Par ailleurs, elle est facile à coordonner avec d'autres types de protections et elle ne requiert pas de sélectivité chronométrique[6],[7],[8].
Les protections de distance permettent de mettre en place une protection par zones. C'est-à-dire que dans un premier temps, elle ne protège qu'un certain nombre de composants situés dans une zone précise. Cela évite de déclencher inutilement des lignes saines. Au bout d'un temps préétabli, si la protection de la zone avoisinante n'a pas rempli son rôle, la protection de distance va tout de même déclencher afin d'interrompre le défaut. Cela permet de combiner sélectivité et robustesse[7].
Les protections de distance ne nécessitent pas de canal de communication (par exemple fibre optique) entre les deux extrémités de la ligne, à la différence des protections différentielles de ligne.
Sa sensibilité est dépendante de la puissance du court-circuit de la charge, son réglage est difficile lorsque la liaison n’est pas homogène (ligne aérienne + câble)[7]. Par ailleurs, il faut rappeler que les défauts peuvent être de plusieurs types : entre phases ou phase-terre, l'impédance en résultant n'est pas identique[9]. La protection de distance n'est pas non plus applicable aux lignes de très courte longueur.
Histoire

Les premiers relais de protection intégrant les fonctions de base d'une protection de distance ont été proposés en 1904 par Felten & Guilleaume-Lahmeyer- Werke AG. Ils sont basés sur la détection simultanés de l'augmentation du courant et d'une baisse de la tension[10].
En , Westinghouse propose une protection de distance dont le temps de déclenchement dépend de la valeur de l'impédance. En 1923, cette société installe les premières protections de ce type aux États-Unis[10].
À partir de 1918, le Dr. Paul Meyer AG améliore le concept et installe une protection de distance sur un câble 4 kV à Karlsruhe entre mars et [11]. Mi 1924, AEG sort le relai Biermann et l'installe sur le réseau 30 kV de Gotha. Les protections connaissent un plus grand succès en Allemagne qu'aux États-Unis. Cela s'explique par le fait que le réseau allemand est plus fortement maillé, celui américain étant principalement radial. C'est à cette époque là également que s'impose le nom protection de distance[10].
L'augmentation de la complexité des réseaux, rend la protection par protection à maximum de courant et protection directionnelle inefficace : les temps de déclenchement deviennent trop long. Il est nécessaire d'améliorer la coordination des protections électriques. Par ailleurs, on remarque que les courants de court-circuit peuvent être parfois plus faible que les courants nominaux, ce qui rend la protection à maximum de courant inefficace[10].
En 1932, H. Neugebauer et Fr. Geise travaillant pour Siemens sortent le premier relais de distance contenu intégralement dans une boîte à l'extrémité de la ligne. Il a un temps de réaction de 0,3 s. En 1937, AEG utilise pour la première fois des redresseurs métalliques dans ses protections de distance, cela diminue fortement leur consommation électrique[12].
À l'époque, la résistance des arcs électriques est mal connue, les appareils ont des difficultés à évaluer correctement la distance pour cette raison. Par ailleurs, les relais se déclenchent de manière injustifiée lorsqu'une oscillation de puissance se produit entre deux générateurs, ce qui est problématique. En 1944, AEG brevète une méthode pour contourner le premier problème, désormais l'impédance est estimée grâce à la formule suivante [12]:


Les années 1950 voient l'apparition des mécanismes d'autoréenclenchement, qui permettent de limiter les coupures en cas d'orage. Elles sont aussi le cadre d'un début de standardisation, permettant l'interopérabilité de systèmes de fabricants différents. L'usage de power line carrier débute en 1955 sur la ligne 220 kV de Preussenelektra. À la fin des années 1960, les dispositifs permettent de déterminer à la fois la distance mais également la direction de laquelle provient le défaut[12].
Le premier relais à distance électronique est entré en service en 1959 par EdF sur une ligne 200 kV. Cependant les relais électromécaniques restent plus économiques. Celui sorti par ASEA en 1970, a un temps de réaction de seulement 21 ms, en 1976 un autre système de la même marque atteint 2,4 ms[12].
Les relais numériques, à base de micro-controleurs, apparaissent en 1971[12]. De nos jours tous les relais fabriqués sont de type numérique, mais il existe encore des relais de type électromécaniques en service[13]. En effet, les relais mho étaient très répandus dans le monde[13]. En outre, les relais électroniques ne dépendent certes plus du moment exercé, mais leur fonctionnement émulent souvent celui des relais électromécaniques. Les mêmes termes peuvent donc être utilisés[8], la connaissance des principes de fonctionnement des relais électromécaniques restent utile.
Différents types de caractéristiques


La protection de distance tente de faire la distinction entre impédance de défaut et impédance de charge. Il faut donc définir, une limite, une frontière entre les impédances que la protection va considérer comme normales, de charge et celles anormales associées à un défaut. Cette limite est appelée ici caractéristique de déclenchement. Elles peuvent avoir plusieurs formes et sont représentées dans un plan résistance - inductance : RX.
Si l'impédance de l'arc électrique est négligée, l'impédance de défaut se trouve sur la droite , la distinction est alors aisée. L'impédance des arcs n'est cependant pas toujours négligeable, elle est considérée comme étant purement résistive et dépend à la fois de sa longueur et de son courant[14]. Ces paramètres ne pouvant être déterminés à l'avance, la résistance d'arc est une inconnue. Sur une ligne électrique longue l'effet des arcs électriques peut normalement être négligé, mais pas sur les lignes courtes avec un courant de défaut faible[13].

Si la résistance d'arc ne peut être négligée, la zone de déclenchement doit être plus large (sur le diagramme RX) que la simple droite Z'l.
Par ailleurs, les générateurs électriques, quand ils se synchronisent au réseau, font augmenter subitement le courant et donc diminuer l'impédance lue. On parle aussi de « pompage »[15]. Un relais peut prendre une oscillation de puissance pour un défaut multi-phases[16]. La caractéristique doit être choisie de manière que cet état transitoire ne provoque pas de déclenchement[6].
Les relais numériques peuvent utiliser n'importe quelle caractéristique, il suffit de la programmer[17]. Par contre les relais statiques ou électromécaniques ont une caractéristique dépendante de leur principe de fonctionnement.
Réactive

La mesure de la réactance a l'avantage de ne pas être sensible à la valeur de la résistance d'arc, mais est très sensible aux synchronisations de générateur et n'est pas directionnelle. Elle est du fait idéale pour les protections phase - terre[6],[18].
Impédante


La caractéristique impédante décrit un cercle sur le diagramme RX, la limite est constituée de tous les Z tel que |Z|= une constante[9]. Elle a le défaut de ne pas être directionnelle, ce qui empêche de faire une protection de zone efficace et sélective (voir exemple ci-contre). Par ailleurs, la résistance d'arc menant au déclenchement dépend fortement de l'inductance. Enfin, elle est vulnérable aux oscillations des générateurs synchrones[13].
mho

Les protections de distance ayant dans le plan RX une caractéristique circulaire passant par l'origine porte le nom de « mho » ou à admittance[4].
Les relais mho auto polarisé[anglais 1] sont les plus sélectifs de tous les relais à distance, car ils ne déclenchent que pour une gamme précise d'impédance qu'on peut représenter sur un diagramme R-X. Ils sont donc peu susceptible de déclencher sur des éléments perturbateurs autre qu'un défaut de la ligne. Il est donc un élément privilégié pour les lignes de longues distances[6].
Les relais mho sont intrinsèquement directionnel. Ils sont caractérisés par l'impédance sur le cercle et par l'angle caractéristique du relais φ, qui est l'angle entre l'axe R et la droite passant par l'origine et le centre du cercle. Cet angle doit être plus faible que celui formé avec l'impédance de la ligne, afin d'être plus sensible en cas de défaut avec un arc fortement résistif[13].
Un désavantage du mho est qu'en cas de défaut proche du relais, la tension est trop faible et la sensibilité mauvaise[8]. Pour contourner ce défaut, une solution consiste à introduire partiellement la tension d'une autre phase, potentiellement saine pour soutenir la tension. La caractéristique reste alors circulaire, mais le centre du cercle se rapproche de l'origine. On parle de mho à polarisation croisée[anglais 2],[19].
Les mho sont plus simple à configurer que les relais quadrilatéraux, mais sont moins sensible aux défauts résistifs en bout de ligne[8]. Aux États-Unis, la caractéristique mho est encore très utilisée dans les relais numériques[17].
Si on configure la caractéristique mho de sorte que la droite de l'impédance de la ligne passe par le centre du cercle, on peut faire l'interprétation géométrique suivante. Soit Zrelais l'impédance sur la ligne à partir de laquelle le relais déclenche. On peut également définir , avec Z l'impédance mesurée. Si l'angle entre et est supérieur à 90° (voir figure) alors Z est en dehors du cercle, s'il est égal à 90° Z est sur le cercle, inférieur dans le cercle[13].



 Si l'angle est supérieur à 90°, Z est en dehors du cercle
Si l'angle est supérieur à 90°, Z est en dehors du cercle Si l'angle est égal à 90°, Z est sur le cercle
Si l'angle est égal à 90°, Z est sur le cercle Si l'angle est inférieur à 90°, Z est dans le cercle
Si l'angle est inférieur à 90°, Z est dans le cercle
Quadrilatérale

Une caractéristique quadrilatérale est délimitée par 4 droites[9]. Les relais quadrilatéral ont l'avantage d'être plus sensible aux défauts résistifs que les relais mho. Ces caractéristiques sont très flexibles en termes d'impédance, aussi bien pour les défauts phase-phase que phase-terre. Pour cette raison, ils sont très utilisés par les relais analogiques et numériques[13].
Le temps de résolution de l'algorithme quadrilatéral classique est d'environ 40 ms. Afin d'éviter cette lenteur, un algorithme détectant une variation rapide du courant et de la tension appelé algorithme « delta » peut être mis en place. Dans ce cas, les deux types d'algorithmes sont exécutés en parallèle, ceux classiques permettant de détecter les défauts que l'algorithme delta ne reconnait pas[13].
Lenticulaire

Une zone lenticulaire est formée par l'intersection de deux zones circulaires de type mho. L'axe de la lentille est celui de la ligne. La sensibilité au défaut résistif est limitée, par contre la probabilité de déclenchement due à des oscillations de puissance est très faible[16]. En pratique, ce type de zone n'est plus utilisé[réf. souhaitée].
Autres
D'autres formes de caractéristiques sont possibles : ovale, en hélice, en cornet à glace, en cacahuète, en trou de serrure, etc[20]. Par ailleurs, des caractéristiques courant-tension peuvent être également utilisées en lieu et place des diagrammes RX. Ceci permet de distinguer, pour une même impédance, les situations de défaut, lorsque la tension est faible, et les situations de transit, lorsque la tension est élevée. L'inconvénient de ce système est la difficulté de le faire fonctionner avec un dispositif antipompage[15].
Protection par zone
Principe
Le principe de sélectivité assure que seules les lignes défectueuses soient ouvertes, tandis que les lignes saines restent connectées. Toutefois, il faut pouvoir parer à la défaillance d'une protection, ainsi des protections de secours[anglais 3] sont utilisées.
L'exemple suivant est purement théorique, il suppose que toutes les lignes ont même niveau de tension.
| Zone 1
0 s |
Zone 2
0,5 s |
Zone 3
2,5 s |
Amont
7 s | |
|---|---|---|---|---|
| Relais 1 | ||||
| Relais 2 | X | |||
| Relais 3 | X | |||
| Relais 4 | X | |||
| Relais 5 | X | |||
| Relais 6 | X | |||
| Relais 7 | X | |||
| Relais 8 | X | |||
| Relais 9 | X | |||
| Relais 10 | X | |||
| Relais 11 | X |
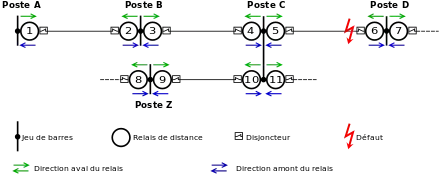
Lors de son apparition, le défaut est détecté par tous les relais à l'exception du 1 qui est trop loin. Les autres relais la visualisent de la manière suivante:
- Pour les relais 2, 4, 7, 8, 10 et 11 le défaut est derrière eux.
- Pour les relais 3 et 9, le défaut est en zone 3.
- Pour le relais 5, il est en zone 2.
- Pour le relais 6, il est en zone 1.
Dans tous ces relais, un chronomètre commence à décompter le temps par rapport à l'apparition du défaut.
Le processus est alors le suivant:
- Le relais 6 envoie l'ordre de déclenchement à son disjoncteur qui s'ouvre au bout de 20 ms environ. Le relais 7 voit disparaître le défaut et arrête son décompte.
- Le relais 5 envoie l'ordre de déclenchement à son disjoncteur au bout d'environ 0,5 s (il se trouve en zone 2). Le défaut disparaît, les autres relais le voient disparaître.
- Si le relais 5 et/ou son disjoncteur ne fonctionnent pas correctement, alors les relais 3 et 9 vont se déclencher au bout de 2,5 s. Dans tous les cas le relais 11 va se déclencher au bout de 7 s.
- Si le relais 3 et/ou son disjoncteur ne fonctionnent pas correctement, alors les relais 2 et 4 vont se déclencher au bout de 7 s.
- Si le relais 9 et/ou son disjoncteur ne fonctionnent pas correctement, alors les relais 8 et 10 vont se déclencher au bout de 7 s.
- Si le relais 6 et/ou son disjoncteur ne fonctionnent pas correctement, alors le relais 7 va se déclencher au bout de 7 s.
On note que les relais 3 et 9 déclenchent avant les relais 4, 10 et 11 qui sont pourtant plus proche du défaut. Cela est dû au fait que les temps de déclenchement en amont sont réglés de manière plus longue que ceux en aval.
En pratique la première zone déclenche au bout d'un ou deux cycles, ce qui représente 20 à 40 ms dans un réseau 50 Hz. La zone 2 au bout de 300 à 400 ms[21]. Les relais électromécaniques ont des temps de réaction dépendant de la valeur de l'impédance, au plus celle-ci est faible au plus le relais est rapide[13].
Les protections de distance servent parfois également de protection de secours pour les transformateurs de puissance et les générateurs[21], bien que des protections bien plus adaptées existent comme les protections différentielles.
Réglages


Les zones doivent être réglées correctement afin de garantir la sélectivité et la robustesse. En l'absence de dispositif complémentaire, la portée de la protection en zone 1 ne doit pas dépasser 80 à 85 % de la ligne pour assurer la sélectivité de la protection. Pour la zone 2, la portée doit être comprise entre 120 et 150 % et sert à protéger les parties de la ligne non couverte par la zone 1[13],[6]. Par ailleurs, la zone 2 doit déclencher après : la plus lente des protections différentielles des jeux de barre à l'autre bout de la ligne, des protections différentielles des transformateurs à l'autre bout de la ligne et des relais de lignes sur les sections adjacentes[6]. La zone 3 sert de secours pour la zone adjacente. Elle doit donc couvrir cette dernière autant que possible[6]. On utilise aussi fréquemment une zone arrière qui permet à la protection de surveiller les défauts en amont de la ligne.
L'augmentation de la résistance causée par un arc électrique peut faire passer un défaut en zone 1 pour un de zone 2, un de zone 2 pour un de zone 3[6]...
Le réglage est d'autre plus difficile que le ratio impédance (source impedance ratio, SIR) est grand. Il est défini comme suit[13]:

Avec Zs, l'impédance en amont de la protection, Zl, celle de la ligne, c'est-à-dire en aval. Si le ratio est grand, un court-circuit côté ligne fait peu varier le courant, parfois moins qu'un changement de charge[13].
Sur les systèmes électromécaniques le temps de déclenchement et la précision de l'estimation de la distance dépendent de la valeur du courant et de la tension mesurée[10].
Téléaction
La téléaction est le fait que deux protections, de distance généralement et situées à chaque extrémité d'une ligne, échangent des informations entre elles afin d'augmenter leur performance[15].
De nombreux schémas de téléaction différents existent. Toutefois, on peut distinguer deux types de stratégie : les schémas à déclenchement et les schémas à blocage. Dans les schémas à déclenchement la protection à une extrémité de la ligne envoie un autre de déclenchement rapide à l'autre extrémité. L'autre disjoncteur déclenche alors immédiatement. Dans le cas des schémas à blocage, la protection à une extrémité de la ligne envoie un autre de blocage à l'autre extrémité, le disjoncteur ne va donc pas déclencher intempestivement. Diverses variantes existent en fonction de la zone surveillée par chaque protection et des conditions appliquées au déclenchement. Les schémas à déclenchement ont une sécurité accrue : si la liaison entre les protections défaille, il n'y a pas de déclenchement intempestif par contre une sureté moindre : dans ce cas la téléaction ne fonctionne plus et les déclenchements ne sont plus rapides. À l'opposé, les schémas à blocage ont une sureté accrue : si la liaison entre les protections défaille, les déclenchements rapides ont tout de même lieu, par contre leur sécurité est moindre : il n'y a plus de blocage sans la liaison et donc des lignes saines peuvent déclencher[4],[15].
La rapidité exigée des téléactions ne permet pas de mettre en place des protocoles de vérification des erreurs de transmission[15].
Construction
À pont de Graetz

Le dispositif à pont de Graetz, dispose d'une résistance réglable (voir ci-contre). Le relais déclenche quand :
- , Soit


Il a donc une caractéristique impédante, la valeur de l'impédance limite étant réglable[17].
Il était surtout utilisé en Allemagne[17].
Électromécanique
Les relais électromécaniques utilisent les flux produits par la tension et le courant de ligne pour se déclencher[8].
Parmi les avantages de relais électromécaniques, ils consomment peu d'énergie auxiliaire au repos, le couple de déclenchement est constant tout au long de la période si les transformateurs de courant ne saturent pas. Même dans ce cas là, ils ne sont saturés que sur une demi-période et assurent un bon fonctionnement sur l'autre. Le relais est donc plus lent mais fonctionnement correctement. Enfin, les relais électromécaniques sont peu sensible aux phénomènes transitoires[15].
Parmi leurs défauts, le temps de déclenchement dépend des valeurs de tension et de courant en entrée. Au plus, le courant est grand au plus le relais est rapide. Dans les pires cas, on peut atteindre un temps de déclenchement de 300 à 500 ms. Par ailleurs, leur consommation d'énergie sur le secondaire des transformateurs de courant et de tension, nuit à la précision de ces derniers. Enfin, ils sont sensibles à l'harmonique de rang 2[15].
À bascule

Fonctionne seulement avec l'amplitude[10]. On parle aussi d'un relais à pourcentage[15].
Le courant crée un moment qui déclenche le relais, la tension un moment qui empêche le déclenchement du relais[8]:

Si le couple devient positif, le dispositif déclenche. L'impédance limite est donc[8]:

Sur un diagramme RX l'ensemble des points dessinent un cercle. Elle n'est à l'origine pas directionnelle. Ces relais doivent être combinés à un relais directionnel pour obtenir cette propriété[8].
Coupe d'induction

La coupe d'induction utilise seulement le déphasage pour déclencher. Utilise le principe de Ferrarri, et donc seulement le déphasage. Dans le détail, un disque ou un cylindre en aluminium peut tourner dans l'entrefer de deux circuits magnétiques. Le courant I1 crée dans le circuit magnétique une induction B1 qui lui est proportionnelle. Cette induction crée dans le disque des forces électromotrices induites, proportionnelles à la dérivée de I1 qui font circuler des courants de Foucault pratiquement en phase avec elles. Les courants de Foucault passant dans l'entrefer du deuxième circuit magnétique créent, avec l'induction B2, un couple qui fait tourner le disque. Il en est de même des courants de Foucault créés par I2 dans l'induction B1. Soit C le couple qui s'exerce sur le disque[15]:

Soit en régime permanent :

Pour la protection à distance l'une des bobines est reliée au transformateur de courant, l'autre au transformateur de tension. Il en résulte une caractéristique mho[22]. L'équation conduisant au déclenchement est[22]:

Le moment est alors égal à zéro quand vaut +/-90°. On retrouve l'angle droit décrit dans le chapitre mho entre la tension et ZI, qui décrit un cercle dans le plan RX[8].

Elle était très utilisée aux États-Unis et au Royaume-Uni[17].
Statique
Un relais statique est un relais constitué de transistors, d'amplificateurs opérationnels et de portes logiques[23].
L'avantage des relais statiques est que leur temps de déclenchement ne dépend pas des valeurs du courant et de la tension en entrée. On peut donc réduire la taille des intervalles sélectifs à une valeur d'environ 150 ms. Leur vitesse de fonctionnement moyenne est aux alentours de 30 à 40 ms. Leur consommation d'énergie est suffisamment faible pour ne pas nuire à la précision des transformateurs de courant et de tension qui les alimentent. Enfin, ils peuvent être désensibilisés aux harmoniques paires[15].
Au niveau des défauts, ils consomment autant d'énergie au repos ou lors des déclenchements, il faut donc adapter les batteries des accumulateurs en conséquence. Ensuite, ils sont sensibles aux phénomènes transitoires. En outre, les signaux de détection de défaut ne sont élaborés qu'à deux instants privilégiés de la période. Si à ces instants la grandeur utilisée est entachée d'erreur, la protection peut émettre des ordres erronés. C'est en particulier le cas pour les intensités lorsque les réducteurs de courant sont saturés. Il faut donc souvent remplacer les transformateurs de courant si de tels relais sont utilisés[15].
Numérique
Un relais numérique travaille avec un signal discrétisé. Ils ont une meilleure précision et un temps de réponse plus faible. La sélectivité est également améliorée, même en cas de défauts complexes. Ils rendent aussi la communication avec les ordinateurs plus simple, comme par exemple pour l'intégration de la protection dans un système de commande s, . Les relais numérique moderne combinent différentes fonctions de protection, telle que celle de distance, mais aussi de mesure[24].
Les relais numériques sont relativement proches des relais statique. Ils permettent cependant l'échantillonnage des grandeurs d'entrée, c'est-à-dire des trois tensions, des trois courants, et du courant résiduel à titre de contrôle, par exemple 40 fois par période. Ceci permet de ne plus faire les mesures uniquement à des instants privilégiés, au passage par zéro de grandeurs électriques, mais de manière quasi - continue, comme les protections électromécaniques. Des vérifications appropriées permettent d'éliminer les mesures faites lorsque les transformateurs de courant sont saturés. De plus, ils peuvent mémoriser les valeurs des grandeurs sur le réseau juste avant un défaut. Cela permet de faire des comparaisons avec les valeurs lors du défaut : une variation de tension lui permet de conclure à une mise en route d'un générateur, une variation d'intensité permet de connaître la phase affectée, une variation de puissance détermine la direction du défaut[15].
Finalement, les relais numériques peuvent acquérir des signaux non électriques, comme ceux optiques produits par les transformateurs de courant à effet Faraday ou les transformateurs de tension à effet Pockels[15].
Coût
Les relais de distance sont des dispositifs relativement coûteux, cela explique s'ils soient réservés à la protection des lignes de haute tension. J.L. Lilien parle d'un prix approximatif de 10 000 €[20].
Fonctions associées aux protections de distance
Réenclencheur
Les protections de distances actuelles intègrent en général une fonction réenclencheur. La fonction réenclencheur (ANSI 79) est destinée à l’élimination des défauts fugitifs et semi-permanents de lignes aériennes, qui sont statistiquement nombreux[8], de l'ordre de 95 % des défauts[15], en limitant au minimum le temps d’interruption de service. Elle génère automatiquement des ordres de refermeture de disjoncteur pour réalimenter une ligne aérienne après défaut, et procède en plusieurs étapes :
- à l’apparition du défaut, déclenchement du disjoncteur pour mise hors tension du circuit,
- temporisation nécessaire à la reconstitution de l’isolement à l’endroit du défaut, de l'ordre d'une seconde.
- réalimentation du circuit par réenclenchement du disjoncteur.
Si le réenclenchement échoue, il est très probable que le défaut soit permanent et la protection arrête de réenclencher après une ou plusieurs tentatives[15]. L’activation du réenclenchement est assurée par les protections des liaisons. Le réenclencheur peut être monophasé et/ou triphasé[7].
Autres fonctions
En dehors des fonctions de réenclencheur, les protections de distance numériques intègrent bien d'autres fonctions : Protection à maximum de courant, protection directionnelle, protection directionnelle de terre, etc.
Principaux fabricants
Les principaux fabricants sont les acteurs principaux sur le marché des produits haute tension: ABB, Siemens, Schneider Electric et Alstom Grid. D'autres fabricants existent: ZIV en Espagne, General Electric et SEL aux États-Unis, Toshiba au Japon. D'autres fabricants ont disparu, intégrés dans d'autres groupes (Reyrolle dans Siemens, Asea et BBC dans ABB, AEG et Enertec-Schlumberger dans ce qui est devenu Alstom Grid).
Bibliographie
- (en) Groupe de travail B5.05, Modern techniques for protectiong, controlling and monitoring power transformers, CIGRÉ, coll. « brochure 463 »,
- (en) Gerhard Ziegler, Numerical distance protection, principle and applications, Erlangue, Publicis, (ISBN 978-3-89578-381-4, lire en ligne)
Références
- « Définition sur Electropédia » (consulté le )
- Cigré 463 2011, p. 11
- « CAHIER DES CHARGES GENERAL POSTES HTB (Domaine Contrôle Commande) », sur RTE (consulté le )
- (en) Idaho Power, « Introduction to system protection basics » [PDF], (consulté le )
- Ziegler 2011, p. 22
- (en) « LINE PROTECTION WITH DISTANCE RELAYS » (consulté le )
- « Guide de la protection », sur Schneider (consulté le )
- (en) « FUNDAMENTALS OF PROTECTIVE RELAYING » (consulté le )
- Ziegler 2011, p. 15
- (en) « PAC World, hiver 2008 » (consulté le )
- (de) Walter Schossig, « Geschichte der Schutztechnik », ETG Mitgliederinformation, VDE, no 2, , p. 31-36
- (en) « PAC World, printemps 2008 » (consulté le )
- (en) « Distance protection » (consulté le )
- « Protection et surveillance des réseaux de transport d'énergie électrique », sur EdF (consulté le )
- (en) « Application of overreaching distance relays » (consulté le )
- Ziegler 2011, p. 23
- (en) « Distance relays fondamentals » (consulté le )
- Ziegler 2011, p. 26
- J.L. Lilien, « Transport et Distribution de l'Energie Electrique », (consulté le )
- Ziegler 2011, p. 11
- Ziegler 2011, p. 25
- Ziegler 2011, p. 13
- Ziegler 2011, p. 12

Traductions
- « self polarized »
- « cross polarized »
- « back-up »
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique  Portail de l’énergie
Portail de l’énergie