GPS différentiel
Le GPS différentiel (en anglais Differential Global Positioning System : DGPS) est une amélioration du GPS permettant de passer d'une précision de 15 mètres à 1-3 cm avec les meilleurs implémentations[1]. Il utilise un réseau de stations fixes de référence qui transmet l’écart entre les positions indiquées par les satellites et leurs positions réelles connues. En fait le récepteur reçoit la différence entre les pseudo-distances mesurées par les satellites et les véritables pseudo-distances et peut ainsi corriger ses mesures de positions.
Le terme DGPS peut s’appliquer aussi bien à la technique elle-même qu’à des implémentations qui l’utilisent. Par exemple le WAAS de la Federal Aviation Administration (FAA) utilise des techniques différentielles pour améliorer la précision, elles transmettent les corrections par satellite sur la bande L. Parmi les autres exemples de systèmes similaires on trouve le système européen de complément à la navigation géostationnaire EGNOS, le système japonais MTSAT, le service de correction DGPS canadien et les systèmes commerciaux StarFire et OmniSTAR (en).
Ce terme s’applique aussi souvent de façon spécifique à des systèmes qui re-transmettent des corrections à partir de balises au sol de plus courte portée. Par exemple la US Coast Guard utilise un tel système aux États-Unis en grandes ondes entre 285 kHz et 325 kHz. Ces fréquences sont communément utilisées pour la radio en mer, et sont diffusées près des principales voies navigables et des ports. L’Australie utilise un service similaire pour la navigation terrestre et aérienne, leur signal est transmis par des stations radio AM commerciales.
Histoire
Au début de la mise en service du GPS, l’armée américaine s’est préoccupée de la possibilité que des forces ennemies utilisent les signaux GPS disponibles dans le monde entier pour guider leurs propres armes. Pour éviter ceci le signal principal fut délibérément dégradé en décalant son signal d’horloge d’une quantité aléatoire équivalente à une distance d’environ 100 mètres. Un guidage plus précis était possible mais seulement pour des utilisateurs possédant les clés de déchiffrement adéquates. Connu sous le nom de disponibilité sélective ou SA (Selective Availability), ce système avait pour effet de réduire la précision de la mesure pour les civils, mais elle restait en général suffisante pour une utilisation standard.
Ceci présenta un problème pour les agences civiles qui utilisaient différents systèmes de navigation radio tel que LORAN pour la navigation maritime ou VOR et NDB pour la navigation aérienne. Ces systèmes civils coûtaient des millions de dollars par an, or ils auraient pu être remplacés à peu de frais par des systèmes basés sur le GPS, mais la précision offerte avec le SA actif était insuffisante pour envisager raisonnablement ce remplacement. La solution la plus simple était de désactiver SA, mais l’armée rejeta d'abord les demandes des différentes agences (particulièrement celles de la FAA, de l’USCG, et du DOT) pour raisons de sécurité.
Durant la première moitié des années 1980, plusieurs agences imaginèrent une solution au problème du SA. Étant donné que le signal SA n’était pas changé trop fréquemment, l’effet du décalage sur le positionnement était relativement constant – c'est-à-dire que si le décalage était de « 100 mètres à l’est », ce décalage serait uniforme sur une zone relativement vaste. D’où l’idée qu’en transmettant ce décalage aux récepteurs GPS de la zone, on pourrait éliminer les effets du SA, ce qui aurait pour résultat d’obtenir des mesures proches des performances théoriques du GPS, environ 15 mètres. De plus, une autre source d’erreurs importante dans une position donnée par GPS était due aux délais de transmission dans l’ionosphère et pouvait aussi être mesurée et corrigée en l'envoyant aux récepteurs GPS. Ceci permit une amélioration de la précision d’environ 5 mètres, ce qui est suffisant pour les besoins civils.
Les garde-côtes américains furent parmi les partisans les plus actifs du DGPS (GPS différentiel), ils expérimentèrent le système de façon de plus en plus poussée au cours des années 1980 et au début des années 1990. Ces signaux sont diffusés en grandes ondes sur les fréquences maritimes et pourraient être reçus sur les radio téléphones existants et entrés dans des récepteurs GPS équipés de façon adéquate. Les principaux revendeurs de GPS proposaient des appareils pourvus d’entrées DGPS, non seulement pour les signaux USGC, mais aussi des appareils destinés à la navigation aérienne recevant ces signaux en modulation de fréquence ou sur des bandes de fréquences commerciales en modulation d’amplitude.
Ils commencèrent par envoyer des signaux DGPS de qualité de façon limitée en 1996 et étendirent le réseau jusqu’à couvrir la plupart des ports d’escale, ainsi que la route maritime du Saint-Laurent en partenariat avec les garde-côtes canadiens. Des plans furent élaborés pour étendre le système à l’ensemble des États-Unis, mais cela n’allait pas être facile. La qualité des corrections DGPS diminuait avec la distance et la plupart des émetteurs importants sont généralement regroupés près des villes. Ce qui signifiait que la couverture par des balises GPS au sol serait faible dans les zones faiblement peuplées, notamment dans le Midwest.
Au contraire la FAA (et d’autres agences) commencèrent des études pour diffuser les signaux dans tout l’hémisphère à partir de satellites de communications en orbite géostationnaire. Ceci conduisit à la création de WAAS et à des systèmes similaires, bien que le terme DGPS ne s’applique généralement pas à ces systèmes. WAAS offre une précision semblable à celle des réseaux DGPS au sol de l’USCG et la question de savoir si ces derniers seront désactivés au fur et à mesure que WAAS devient complètement opérationnel fait l’objet de débats.
Dès le milieu des années 1990 il était clair que le SA n’avait plus d’utilité pour jouer le rôle qui lui était dévolu. Le DGPS allait le rendre inefficace aux États-Unis, précisément là où on considérait qu’on en avait le plus besoin. De plus l’expérience durant la deuxième Guerre du Golfe démontra que l’utilisation généralisée de récepteurs civils par les militaires nuisait apparemment davantage à leurs propres troupes que si le SA était désactivé. Après avoir subi des pressions pendant de nombreuses années les opérateurs du GPS acceptèrent de désactiver le SA de façon permanente en l’an 2000.
Cependant à ce stade le DGPS s’était transformé en un système fournissant une précision supérieure à celle que même un signal GPS, avec SA désactivé, pouvait fournir à lui seul. Il y a plusieurs autres sources d’erreur qui partagent les mêmes caractéristiques que SA en ce sens qu’elles sont identiques sur de vastes zones pendant une durée raisonnable. Parmi ces sources d’erreur on compte les effets ionosphériques mentionnés plus tôt ainsi que des erreurs dans les données des éphémérides de position transmises par satellite et le décalage d’horloge des satellites. Selon la somme de données envoyées dans le signal de correction du DGPS, la correction de ces effets peut réduire l’erreur de façon significative, les meilleures implémentations offrant des précisions de moins de 10 cm.
En plus des déploiements continuels de systèmes des USCG et de systèmes sponsorisés par la FAA, de nombreux revendeurs ont créé des services DGPS commerciaux qui vendent leur signal (ou des récepteurs pour ce signal) à des utilisateurs qui ont besoin d’une meilleure précision que la précision nominale de 15 mètres fournie par le GPS. Tous les GPS commerciaux, même les GPS portables proposent maintenant des entrées pour données DGPS et nombreux sont ceux qui supportent WAAS directement. Dans une certaine mesure le « DGPS » fait maintenant naturellement partie des applications GPS.
Principe de fonctionnement
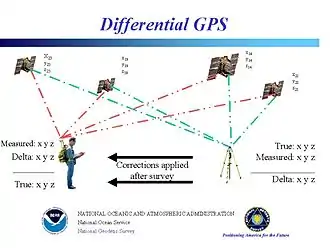
Le principe du DGPS est basé sur le fait qu'en des points voisins, les effets des erreurs de mesure, comme d'ailleurs les effets des erreurs ajoutées volontairement, sont très semblables : il suffit donc d'observer en un point connu les fluctuations des mesures, et de les transmettre à un récepteur observant les mêmes satellites, pour permettre à celui-ci de corriger une grande partie des erreurs de mesure, qu'elles soient liées au satellite (horloge), aux conditions de propagation (effets troposphériques...) ou à des fluctuations volontaires du signal émis. On peut ainsi passer d'une précision de l'ordre de 10 à 20 mètres à une précision de 5 à 3 mètres sur une grande zone (plusieurs centaines de kilomètres). Le DGPS est basé sur un ensemble de stations fixes, dont la position est connue exactement ; elles reçoivent les signaux des mêmes satellites que les terminaux mobiles présents dans leur zone d'action, et elles estiment en permanence l'erreur locale de positionnement du GPS en comparant la position calculée avec leur position réelle. Cette information est transmise par radio ou par satellite (Inmarsat ou autre).
Le mode « différentiel » existe en plusieurs variantes ; la plus élaborée utilise la mesure de la phase des signaux reçus (GPS RTK), et non le code binaire pour calculer les pseudo-distances ; à partir d'une station située sur un point connu ou d'un réseau de stations permanentes de référence distants de quelques kilomètres, on obtient ainsi à l'aide du GPS des positions précises à quelques centimètres près dans les trois dimensions (GPS géodésique ou cinématique), ce qui permet de l'utiliser non seulement pour des levers, mais aussi pour des implantations en topographie. On peut même atteindre quelques millimètres avec des logiciels de traitement très élaborés utilisés en temps différé.
Pour l’utilisateur désirant utiliser le DGPS, il faut brancher un récepteur DGPS sur le récepteur GPS normal (quand cela est possible car tous les récepteurs ne sont pas compatibles avec un récepteur DGPS), configurer le récepteur GPS et ensuite la position sera automatiquement corrigée.
Types d'erreurs
- erreurs dues au décalage d'horloge : L’erreur de synchronisation est une erreur due à une mauvaise corrélation temporelle entre l’horloge du récepteur et l’horloge du satellite
- éphémérides : Les éphémérides chargées depuis le sol et diffusées par le satellite sont imparfaites
- effets relativistes : les horloges de précision situées au sol d’une part et sur les satellites orbitant autour de la Terre sont soumises à des comportements différents
- erreur ionosphérique : relatif au trajet dans la couche ionosphérique.
- erreur troposphérique : relatif au trajet dans la couche troposphérique.
La simple différence
En observant simultanément le même satellite au même moment à partir de deux récepteurs, on accède à deux pseudo-distances dont on fait la différence. Soient :
- R: la distance calculée par les récepteurs
- d : la distance réelle
- dt : l'erreur de synchronisation

ou de même pour l'erreur troposphérique, l'erreur éphéméride et l'erreur relativiste.

Les termes d’erreurs communs disparaissent alors ; ce sont les erreurs propres aux satellites :
- décalage d’horloge ;
- éphéméride ;
- effets relativistes.
La double différence
Si l’on observe, par deux récepteurs, simultanément deux satellites, on peut effectuer une double différence c'est-à-dire la différence des simples différences effectuées sur chaque satellite.
Les erreurs propres aux satellites disparaissent évidemment de même, mais aussi les erreurs dues aux décalages des horloges des récepteurs.
La triple différence
On observe dans ce cas simultanément par deux récepteurs, deux satellites à des époques différentes. La triple différence est le résultat de la différence des doubles différences correspondant à chacune des époques.
En considérant que les ambiguïtés sont constantes dans le temps, celles-ci sont entièrement éliminées.
Notes et références
- (de) AdV-Arbeitsgemeinschaft der deutschen Vermessungsverwaltungen, « Dienste im Überblick », sur SAPOS (consulté le )
Voir aussi
Articles connexes
Liens externes
 Portail de l’information géographique
Portail de l’information géographique  Portail des télécommunications
Portail des télécommunications