Courbure d'un arc
Dans l'étude métrique des courbes du plan et de l'espace, la courbure mesure la manière dont une courbe, ou arc géométrique, s'éloigne localement d'une ligne droite. Elle évalue le rapport entre la variation de la direction de la tangente à la courbe et un déplacement d'une longueur infinitésimale sur celle-ci : plus ce rapport est important, plus la courbure est importante. En langage imagé, la courbure indique de combien il faut tourner le volant d'une voiture pour aborder un virage (volant tourné modérément pour une courbure faible et fortement pour une courbure forte).
Plus précisément, si Γ est une courbe régulière de classe Ck avec k ≥ 2 - c'est-à-dire une courbe paramétrée par une fonction dérivable au moins deux fois, dont la dérivée première n'est jamais nulle et dont la dérivée seconde est continue - on sait que Γ possède localement une paramétrisation normale, c'est-à-dire qu'au voisinage d'un point M, il existe une fonction g paramétrisant Γ et telle que ||g '|| = 1. Si g(s) = M, la courbure de Γ au point M est :

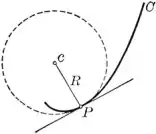
Si la courbure au point M est non nulle, son inverse donne le rayon du cercle osculateur, c'est-à-dire le rayon du cercle s'approchant au plus près de la courbe au point M.
Dans le cas d'une courbe plane orientée, dans un plan orienté, on peut définir une courbure algébrique, qui indique non seulement l'intensité de l'incurvation mais aussi sa direction[1]. Pour reprendre l'image de la route, dans un plan orienté selon le sens trigonométrique, une courbure algébrique positive indique qu'il faut tourner le volant à gauche pour aborder le tournant. La courbure algébrique est liée à l'orientation de la courbe, c'est-à-dire son sens de parcours : si pour un conducteur, il faut tourner à gauche pour aborder un tournant, pour les voitures roulant en sens inverse, il faut tourner à droite pour aborder ce même virage.
Si g est une paramétrisation normale de Γ, pour tout s, il existe un vecteur unitaire n(s) tel que (g '(s), n(s)) soit une base orthonormée directe du plan, et il existe une fonction réelle γ telle que , pour tout s, g"(s) = γ(s)n(s). La valeur γ(s) est la courbure algébrique de l'arc orienté au point M = g(s)
La valeur absolue de la courbure algébrique donne la courbure géométrique.
Dans le cas d'une courbe gauche (c'est-à-dire non plane), il n'est pas possible de définir de courbure algébrique.
Approche par la géométrie élémentaire
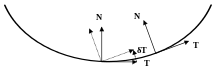
Lors du mouvement d'un point mobile, il est possible de suivre l'évolution de la tangente à l'aide de l'angle α que fait cette tangente avec une direction fixe. La courbure mesure la variation de l'angle α rapportée à la longueur parcourue. L'exemple du cercle, qui peut être traité par un argument de géométrie élémentaire, sert de modèle pour introduire la courbure d'un mouvement plus complexe, graphe ou arc paramétré.
Cas du cercle
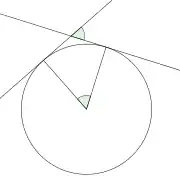
Lors d'un déplacement quelconque sur un cercle de rayon R, la longueur parcourue est ΔS, le changement de direction des tangentes est mesuré par l'angle Δα entre les tangentes au point de départ et au point d'arrivée. Cet angle correspond à l'angle au centre entre le point d'arrivée et le point de départ. On a ainsi la relation : Δα = ΔSR Le rapport ΔαΔS est constant et égal à 1/R. Il est indépendant des points de départ et d'arrivée mais aussi du mode de parcours (mouvement uniforme ou non). C'est ce qu'on appelle la courbure du cercle. Plus le rayon est grand, plus cette courbure est faible.
L'idée est de considérer une courbe localement comme un cercle et de chercher la limite du rapport précédent pour un déplacement infiniment petit sur la courbe.
Cas du graphe d'une fonction
Considérons un plan muni d'un repère orthonormé (0, x, y), et un arc défini comme le graphe d'une fonction ƒ, c'est-à-dire défini par l'équation y = ƒ(x).
Si cet arc est « suffisamment lisse », alors il admet en tout point x une tangente, et la pente de la tangente est la dérivée en ce point, ƒ'(x).
Si cet arc est une droite, la tangente est la même partout, ƒ' est constante. Si cet arc présente une courbure non nulle, c'est qu'il s'écarte de la notion de droite : sa dérivée varie. Intuitivement, on voit que plus l'arc est courbe, plus la dérivée « varie vite ».
On peut ainsi lier la courbure à la variation de la dérivée, et donc à la dérivée seconde.
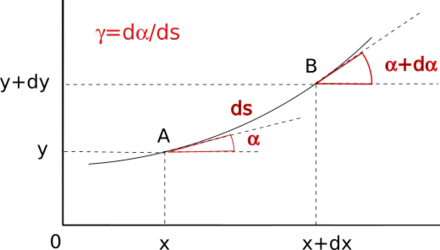
Si l'on cherche à chiffrer cette courbure, il faut s'intéresser aux variations infinitésimales d'angle des tangentes et de longueur d'arc. La tangente à la courbe fait avec l'axe des abscisses un angle α(x) = arctan (f '(x)). Pour une variation infinitésimale dx, on obtient


La courbure algébrique est alors donnée par le rapport de ces deux variations

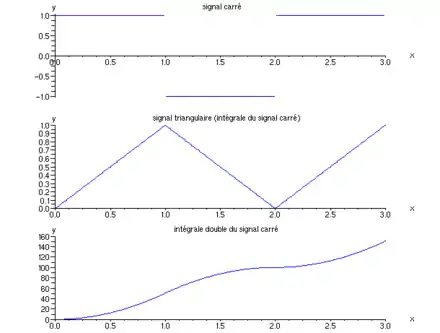
La notion de « suffisamment lisse » est trompeuse. Considérons la courbe du bas ci-contre. Sa dérivée est la courbe du milieu, une courbe en dents de scie. Sa dérivée seconde est la courbe du haut, un signal carré. On voit que localement — en x = 1, x = 2, … — on ne peut pas définir de dérivée seconde, puisque celle-ci vaut -1 d'un côté et +1 de l'autre côté du point. Localement, l'arc a donc une courbure indéfinie.
Courbure algébrique d'un arc plan orienté
Considérons un arc paramétré de classe dans le plan euclidien orienté , supposé régulier (de vecteur dérivé jamais nul). On peut choisir une origine et prendre pour paramètre l'abscisse curviligne correspondante. Il s'agit d'un paramétrage normal (la vitesse est de norme constante égale à 1), ce qui permet de définir facilement le repère de Frenet :




- origine : le point
- premier vecteur : le vecteur tangent unitaire ,
- deuxième vecteur vecteur normal unitaire, complétant le premier en une base orthonormale directe


La courbure introduite à partir de l'accélération
Le vecteur tangent unitaire possédant une norme constante, on démontre que sa dérivée lui est toujours orthogonale :

Il existe donc une fonction γ, appelée courbure algébrique, telle que[2]

En paramétrage normal, le vecteur accélération est donc normal (colinéaire au vecteur normal unitaire) et la courbure est sa coordonnée selon le vecteur normal unitaire.
Le signe de la courbure renseigne sur la concavité de la courbe, c'est-à-dire le demi-plan de frontière la tangente et contenant localement la courbe. Si la courbure est strictement positive, le second vecteur de la base de Frenet, pointe vers la concavité de la courbe, si la courbure est strictement négative, c'est l'opposé du second vecteur qui pointe vers la concavité de la courbe[3].
Cas d'un paramétrage quelconque
Dans un paramétrage quelconque, la courbure peut aussi être obtenue à partir de la vitesse et de l'accélération par la formule[2],[4]

(où det désigne le produit mixte).
Cette formule montre qu'un point est birégulier si la courbure en ce point est non nulle.
La courbure vue comme vitesse de rotation du repère de Frenet
Pour déterminer complètement les vecteurs de la base de Frenet, il suffit d'un paramètre angulaire α, qui est plus formellement le relèvement angulaire et qui peut toujours être défini pour une courbe suffisamment régulière, donnant l'angle entre T et le premier vecteur de la base fixe (vecteur des abscisses)

Ce paramètre α s'interprète donc comme l'angle que forme la base de Frenet avec une direction fixe.
Il est alors judicieux de prendre l'angle α pour paramètre et de dériver les éléments du repère de Frénet par rapport à α. En mathématiques du moins, il est nécessaire de valider cette opération. On montre que si l'arc est birégulier (c'est-à-dire que les vecteurs dérivée première et seconde ne sont jamais colinéaires), il est possible de faire de l'angle α une fonction régulière reparamétrant l'arc, et ainsi de dériver par rapport à α. On trouvera la discussion correspondante dans l'article sur le théorème de relèvement.
Dans ce paramétrage, le vecteur N s'obtient soit en effectuant une rotation de (quart de tour dans le sens direct), soit en ajoutant à α, soit encore en dérivant par rapport à α


Les formules de dérivation des vecteurs T et N par rapport à α sont rigoureusement identiques aux formules de dérivation de la base mobile en coordonnées polaires, puisqu'il s'agit exactement de la même situation.
La courbure γ vaut alors[5]

C'est donc la vitesse de rotation de la base de Frenet par rapport à une direction fixe (encore une fois, en paramétrage normal).
Introduction géométrique
L'analyse dimensionnelle montre que pour un problème de cinématique, γ est homogène à l'inverse d'une longueur. On introduit donc fréquemment le rayon de courbure (algébrique)[2]

Pour comprendre la signification de cette grandeur, il est intéressant d'examiner le cas particulier d'un cercle

L'application de la formule de calcul de la courbure donne R=r.
Plus généralement, pour tout arc birégulier au point P d'abscisse curviligne s, on montre qu'il existe un unique cercle qui « épouse cette courbe le mieux possible » dans un voisinage de P : le cercle osculateur. Il est tangent à la courbe en P et son rayon est égal à la valeur absolue du rayon de courbure.
La sinuosité décrit la courbure de plusieurs arcs reliés avec des points d'inflexion.
Retour à la courbure positive
La convention choisie précédemment fait de la courbure et du rayon de courbure des quantités algébriques. Si l'on prend les conventions suivantes :
- le rayon de courbure est le rayon du cercle osculateur, il est toujours positif
- la courbure est son inverse, elle est toujours positive
- le vecteur est un vecteur unitaire normal à la courbe au point , orienté vers le centre du cercle osculateur.

Si la courbure algébrique est positive, on retombe exactement sur les conventions précédentes. Sinon, la courbure et le rayon de courbure sont les valeurs absolues des conventions algébriques, et le vecteur normal unitaire est l'opposé de la convention algébrique. La base construite n'est plus forcément une base directe. On retrouve cependant la formule

Avec cette convention le vecteur normal unitaire indique le sens vers lequel est tourné la concavité de la courbe. Cette convention n'a de sens que si la courbure est non nulle. Dans le cas contraire, le vecteur normal unitaire n'est pas défini.
Formules
| Mode de définition | Paramètre et repérage du point M | Fonction courbure algébrique |
|---|---|---|
| Graphe |
| |
| Paramétrique[6] |
| |
| Polaire paramétré[7] | ||
| Polaire[7] | ||
| Implicite | (divergence du gradient normalisé)[Information douteuse] |










Courbure d'un arc gauche
Définition générale
Considérons un arc paramétré de classe dans l'espace euclidien orienté , supposé régulier ; on peut de nouveau prendre pour paramètre l'abscisse curviligne et, au point , on peut définir le vecteur tangent unitaire . Cependant, dans l'espace, il existe une infinité de vecteurs unitaires orthogonaux au vecteur unitaire tangent. L'idée est d'en choisir un ayant même direction que , vecteur que l'on sait être orthogonal au premier et qu'il suffira de diviser par sa norme pour le rendre unitaire.


On définit la courbure au point comme[8]

Si la courbe est bi-régulière, la courbure est non nulle. On peut alors définir le second vecteur de la base de Frenet comme:

Le rayon de courbure est alors égal à l'inverse de la courbure[8].
Calcul pour un paramétrage quelconque
En pratique si on considère une courbe paramétrée , la courbure est la norme du vecteur , où est l'abscisse curviligne définie par , où on note et .





Le problème revient donc à calculer :

On peut également écrire cette formule ainsi:

où désigne le produit scalaire entre un vecteur et un vecteur .



Si on note
- (vecteur unitaire de la tangente)


La formule s'écrit :

Cela fait de le projeté orthogonal[9] de dans l'hyperplan orthogonal au vecteur .


Le théorème de Pythagore permet alors de déterminer la courbure[9] : En dimension trois, la courbure peut s'exprimer par la formule suivante[10] :


Cas d'une courbe tracée sur une surface
En tout point M d'une surface Σ paramétré régulière, dans un espace orienté, on peut définir un vecteur normal à la surface . Pour un arc paramétré de classe et régulier , inclus dans la surface Σ ; on peut de nouveau prendre pour paramètre l'abscisse curviligne et, au point , on peut définir


- le vecteur normal à la surface:
- le vecteur tangent unitaire : .
- un troisième vecteur unitaire formant avec les deux autres une base orthonormale direct:


Le repère est le repère de Darboux de la courbe au point M(s).

Le vecteur , orthogonal à , est alors combinaison linéaire de et . Il existe donc deux fonctions γg et γn, appelées respectivement courbure géodésique et courbure normale telles que



La courbure de l'arc au point M est alors donnée par :

Outre la courbure géométrique, le repère de Darboux fournit également deux courbures algébriques : une dans la direction normale à la surface, l'autre dans une direction située dans le plan tangent à la surface et normale à la tangente à la courbe. Pour reprendre l'exemple de la route tracée en montagne sur la surface de la Terre orientée par un vecteur opposé à l'attraction terrestre, la courbure géodésique γg définit l'amplitude de la courbure dans le plan tangent à la surface, c'est-à-dire l'amplitude à laquelle il faut tourner le volant, son signe continue à indiquer dans quel sens tourner le volant (à gauche pour un signe positif).
Notes et références
- Johann Colombano, « Visualiser la courbure. Du rayon de courbure au tenseur de Riemann », images.math.cnrs.fr, (lire en ligne)
- Patrice Tauvel, Géométrie : Agrégation. 2e cycle/Master, Paris, Dunod, coll. « Sciences Sup », , 532 p. (ISBN 2-10-049413-9), p. 359.
- Pierre Lecomte, Courbes et surfaces, Université de Liège, Département de Mathématique, p. 36
- Pierre Lecomte, Courbes et surfaces, Université de Liège, Département de Mathématique, p. 35
- Tauvel 2005, p. 360
- Jacqueline Lelong-Ferrand et Jean-Marie Arnaudiès, Géométrie et Cinématique, Paris, Dunod, (ISBN 2-04-003080-8) p. 330
- Lelong-Ferrand et Arnaudiès 1977, p. 331
- Tauvel 2005, p. 354
- Laurent Bessières,Cours N1MA6011 : Géométrie Différentielle, Institut de Mathématiques de Bordeaux, année 2013/2014, p. 10.
- Pierre-Antoine Guihéneuf, Études métriques de courbes, Université Paris Sud, p. 3
 Portail de la géométrie
Portail de la géométrie