Courbe du chien
La courbe du chien est la courbe décrite par un chien cherchant à rejoindre son maître en orientant constamment sa trajectoire dans la direction de celui-ci. On suppose leurs vitesses constantes.
Le modèle s’applique en fait à toute situation de poursuite et d’interception d’une cible et on appelle aussi cette courbe « courbe de poursuite » ou « courbe d’interception »[1]. Elle a des applications dans les systèmes de guidage.
Histoire
Cette courbe plane classique a été étudiée dès le XVIIIe siècle. Paul Nahin indique que l’anecdote souvent répétée selon laquelle Léonard de Vinci aurait étudié de telles courbes dans ses carnets est apparemment sans fondement[2].
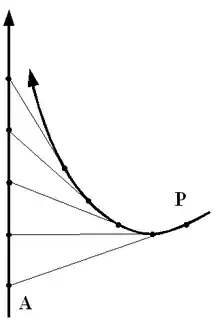
La courbe a été étudiée en particulier par Pierre Bouguer[3]qui l’associe au problème de la poursuite d'un vaisseau par un autre.
Cas où la trajectoire du poursuivi est rectiligne
Lorsque la trajectoire du poursuivi, appelée aussi ligne ou « courbe de fuite », est une droite, le poursuivant le rattrape si et seulement si sa vitesse est supérieure. En cas de vitesse égale, la ligne de fuite est une asymptote pour la courbe de poursuite. Le problème peut être modélisé par une mise en équation différentielle.
Modélisation du problème
Il s’agit d’établir l'équation de la trajectoire que parcourt un chien lorsque son maître, éloigné, l'appelle tout en se déplaçant sur une droite perpendiculairement au segment de droite les séparant à l’instant origine. On conviendra qu'à cet instant, le maître est à une distance « » du chien ; il se déplace de façon uniforme à la vitesse « ». Le chien accourt à une vitesse kv et de façon à être, à tout moment, dirigé vers son maître. On peut donc choisir un repère orthonormé, tel que le chien soit au point « O » de coordonnées (0,0) et le maître au point « A » de coordonnées (a,0) au départ, la droite décrite par le maître étant celle d’équation . On désigne par « » et « » les coordonnées du chien au bout du temps « ».






Mise en équation
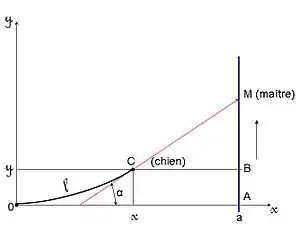
Au bout du temps « », le maître est en « », tel que .


Désignons par « » l'arc de trajectoire « » parcouru par le chien à la vitesse . Calculons la pente au point « » :





soit :

D'autre part, au temps , le chien a parcouru une longueur , ce qui donne :


avec

En dérivant par rapport à , on obtient :

Soit :

ou encore

En utilisant le fait que , et en posant , on obtient finalement l'équation suivante[4] :



Traitement mathématique de l'équation
La théorie des équations différentielles peut alors être mise en œuvre pour obtenir la trajectoire.

























On obtient finalement l'équation de la trajectoire du chien, si k est différent de 1 :

et si k=1,

Solution du problème de départ
Le chien rattrape son maître lorsque x = a, donc pour , à condition que cette valeur de soit positive, donc si et seulement si (c’est-à-dire si le chien va plus vite que le maître). Il le rattrape alors au temps



Lorsque k=1, c’est-à-dire si le maître et le chien ont même vitesse, le chien ne rattrape pas le maître, la droite verticale de fuite est asymptote à la trajectoire du chien, qui est une tractrice.
La courbe de poursuite
Si n’est pas un nombre rationnel, ou si , la courbe de poursuite est une courbe transcendante. Lorsque est un nombre rationnel différent de 1, la courbe de poursuite est unicursale[5]. Une paramétrisation est donnée par exemple en posant :


où , et étant deux entiers premiers entre eux.



Cas où la trajectoire du poursuivi est circulaire
Énoncé du problème
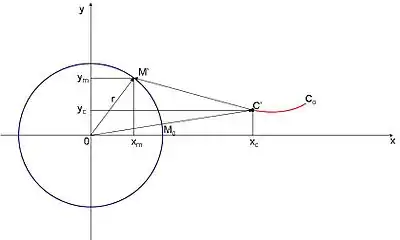
Il s’agit d’établir l'équation de la trajectoire de poursuite que parcourt un chien lorsque son maître, éloigné, l'appelle tout en se déplaçant sur une trajectoire circulaire. On conviendra que le maître se déplace de façon uniforme à la vitesse « v » et dans le sens trigonométrique. Le chien accourt à une vitesse « kv » et de façon à être, à tout moment, dirigé vers son maître. Au bout du temps « t » on convient que le maître s’est déplacé de « Mo » à « M' », c'est-à-dire d’un angle « ω = vt/r »
Éléments pour la résolution du problème
Une méthode consiste en une résolution graphique du problème. Le présent article est rédigé à partir du document du « College of Redwoods »[6]. En raisonnant sur la représentation schématique ci-contre on en déduit :

Avec, en raisonnant dans le plan complexe :


Et donc :

Après développement et en considérant que le maître se déplace à partir du point Mo sur un cercle de rayon unitaire alors :


On obtient les deux relations suivantes :


Autres courbes de poursuite
Dans la culture
- Le comte de Lautréamont fait allusion à la courbe du chien dans Les Chants de Maldoror : « le grand-duc de Virginie, beau comme un mémoire sur la courbe que décrit un chien en courant après son maître, s'enfonça dans les crevasses d'un couvent en ruines » (Chant V)[7].
- Jules Verne évoque cette courbe dans La Jacanda: "Avec quelle grâce il faisait décrire à cette boule [de bilboquet] cette courbe savante, dont les mathématiciens n'ont peut-être pas encore calculé la valeur, eux qui ont déterminé, cependant, la fameuse courbe "du chien qui suit son maître !""
Notes et références
- Cet article est partiellement ou en totalité issu de l'article intitulé « Mise_en_équation#La_courbe_du_chien » (voir la liste des auteurs).
- « Courbes remarquables », Revue du Palais de la Découverte, no spécial 8, , p. 113
- (en) Paul J. Nahin, Chases and Escapes : The Mathematics of Pursuits and Evasion, Princeton, Princeton University Press, (1re éd. 2007), 253 p. (ISBN 978-0-691-12514-5 et 978-0-691-15501-2, lire en ligne)
- Pierre Bouguer, « Sur de nouvelles courbes auxquelles on peut donner le nom de lignes de poursuite », Mémoires de mathématique et de physique tirés des registres de l’Académie royale des sciences, , p. 1-15. L’article suivant, dû à Pierre Louis Moreau de Maupertuis, propose une généralisation à toutes les formes de trajectoires du poursuivi.
- Gomes Teixera 1909, p. 255
- Gomes Teixera 1909, p. 256
- http://online.redwoods.cc.ca.us/instruct/darnold/deproj/sp08/mseverdia/pursuit.pdf
- Comte de Lautréamont, Les Chants de Maldoror, s. l. E. Wittmann, (lire en ligne), « Chant cinquième »
Bibliographie
- [PDF] Francisco Gomes Teixera, Traité des Courbes Spéciales Remarquables, vol. 2, Coimbra, Imprensa da universidade, (lire en ligne)
 Portail de la géométrie
Portail de la géométrie