Installer et compiler ces fichiers c dans votre répertoire de travail.
Vous trouverez le code source et le fichier graphique correspondant à chaque transformation.
L'étude des matrices de transformation fait partie d'un cours de mathématiques et sort du cadre de ce livre.

Reflection about the x-axis
ckd01.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd01.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 1, 0,
0, -1 };
double u[R2*C5] ={ 1, 2, 2, 1, 1,
1, 1, 2, 2, 1 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Reflection about the x-axis : \n");
printf("\n | 1 0 | ");
printf("\n v = | | u ");
printf("\n | 0 -1 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,0,C6);
G_points2D_mR(i_WGnuplot(-3,3,-3,3),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Reflection about the y-axis
ckd02.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd02.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ -1, 0,
0, 1 };
double u[R2*C5] ={ 1, 2, 2, 1, 1,
1, 1, 2, 2, 1 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Reflection about the y-axis : \n");
printf("\n | -1 0 | ");
printf("\n v = | | u ");
printf("\n | 0 1 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,0,C6);
G_points2D_mR(i_WGnuplot(-3,3,-3,3),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Reflection about the line y = x
ckd03.creflexion |
|---|
/* ------------------------------------ */
/* Save as : ckd03.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 0, 1,
1, 0 };
double u[R2*C5] ={ 1, 1, -1, -1, 1,
2, 3, 3, 2, 2 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Reflection about the line y = x : \n");
printf("\n | 0 1 | ");
printf("\n v = | | u ");
printf("\n | 1 0 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,0,C6);
G_points2D_mR(i_WGnuplot(-5,5,-5,5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}
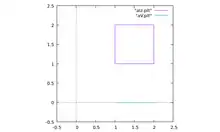
Orthogonal projection on the x-axis
ckd04.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd04.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 1, 0,
0, 0 };
double u[R2*C5] ={ 1, 2, 2, 1, 1,
1, 1, 2, 2, 1 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Orthogonal projection on the x-axis : \n");
printf("\n | 1 0 | ");
printf("\n v = | | u ");
printf("\n | 0 0 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,0,C6);
G_points2D_mR(i_WGnuplot(-.5,2.5,-.5,2.5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Orthogonal projection on the y-axis
ckd05.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd05.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 0, 0,
0, 1 };
double u[R2*C5] ={ 1, 2, 2, 1, 1,
1, 1, 2, 2, 1 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Orthogonal projection on the y-axis : \n");
printf("\n | 0 0 | ");
printf("\n v = | | u ");
printf("\n | 0 1 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,0,C6);
G_points2D_mR(i_WGnuplot(-1,3,-1,3),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Dilatation
ckd06.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd06.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 2, 0,
0, 2 };
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Dilation : \n");
printf("\n | 2 0 | ");
printf("\n v = | | u ");
printf("\n | 0 2 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,0,C6);
G_points2D_mR(i_WGnuplot(-1,3,-1,3),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Contraction
ckd07.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd07.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ .5, 0,
0, .5 };
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Contraction : \n");
printf("\n | .5 0 | ");
printf("\n v = | | u ");
printf("\n | 0 .5 | \n\n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,3,C6);
G_points2D_mR(i_WGnuplot(-.5,1.5,-.5,1.5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Shear in the x-direction with factor k (right)
ckd08.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd08.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 1, 2,
0, 1 };
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Shear in the x-direction with factor k (right):\n");
printf("\n | 1 2 | ");
printf("\n v = | | u ");
printf("\n | 0 1 | \n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,3,C6);
G_points2D_mR(i_WGnuplot(-.5,3.5,-.5,3.5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Shear in the x-direction with factor k (left)
ckd09.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd09.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 1, -2,
0, 1 };
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Shear in the x-direction with factor k (left) :\n");
printf("\n | 1 -2 | ");
printf("\n v[n] = | | u[n] ");
printf("\n | 0 1 | \n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,3,C6);
G_points2D_mR(i_WGnuplot(-2.5,1.5,-1.5,2.5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Shear in the y-direction with factor k (up)
ckd10.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd10.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 1, 0,
2, 1 };
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Shear in the y-direction with factor k (up) : \n");
printf("\n | 1 0 | ");
printf("\n v = | | u ");
printf("\n | 2 1 | \n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,3,C6);
G_points2D_mR(i_WGnuplot(-.5,3.4,-.5,3.5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}

Shear in the x-direction with factor k (down)
ckd11.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd11.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
int main(void)
{
double t[R2*C2] ={ 1, 0,
-2, 1 };
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = ca_A_mR(t,i_mR(R2,C2));
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Shear in the x-direction with factor k (down): \n");
printf("\n | 1 0 | ");
printf("\n v = | | u ");
printf("\n | -2 1 | \n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,3,C6);
G_points2D_mR(i_WGnuplot(-2,2,-2.5,1.5),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
stop();
return 0;
}
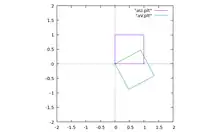
Rotation
ckd12.c' |
|---|
/* ------------------------------------ */
/* Save as : ckd12.c */
/* ------------------------------------ */
#include "v_a.h"
#include "dstrct.h"
#include "dg_uv.h"
/* ------------------------------------ */
void fun(void)
{
double u[R2*C5] ={ 0, 1, 1, 0, 0,
0, 0, 1, 1, 0 };
double alpha = rp_I(360);
double **U = ca_A_mR(u,i_mR(R2,C5));
double **T = rot2D_mR( i_mR(R2,C2),PI/180.*alpha);
double **V = i_mR(R2,C5);
clrscrn();
printf("\n Rotation (%.f degree) : \n",alpha);
printf("\n | cos(alpha) -sin(alpha) | ");
printf("\n v = | | u ");
printf("\n | sin(alpha) cos(alpha) | \n");
printf(" U: ");
p_mR(U,5,0,C6);
mul_mR(T,U,V);
printf(" V: ");
p_mR(V,5,3,C6);
G_points2D_mR(i_WGnuplot(-2,2,-2,2),
U,V);
f_mR(U);
f_mR(V);
f_mR(T);
}
/* ------------------------------------ */
int main(void)
{
do
{
fun();
printf("\n Press 'X' Return to stop\r");
fflush(stdout);
} while(stop_w());
return 0;
}
Cet article est issu de Wikibooks. Le texte est sous licence Creative Commons - Attribution - Partage dans les Mêmes. Des conditions supplémentaires peuvent s'appliquer aux fichiers multimédias.