Maintenant que l'on sait créer des registres, nous sommes proches de pouvoir créer n'importe quel circuit séquentiel. Pour l'instant, on peut créer des circuits séquentiels simples, qui ne contiennent qu'un seul registre. Mais la majorité des circuits séquentiels présents dans un ordinateur possèdent plusieurs registres. Si on utilise plusieurs registres, c'est avant tout pour mémoriser des informations différentes : on pourrait les mémoriser dans un seul registre, mais utiliser un registre par nombre à mémoriser est de loin la méthode la plus intuitive. Sauf qu'un léger détail vient mettre son grain de sel : tous les circuits combinatoires, qui mettent à jour les registres, ne vont pas à la même vitesse ! En conséquence, les registres d'un composant ne sont pas mis à jour en même temps, ce qui pose quelques problèmes relativement fâcheux si aucune mesure n'est prise.
Le temps de propagation
Pour commencer, il nous faut expliquer pourquoi tous les circuits combinatoires ne vont pas à la même vitesse. Tout circuit, quel qu'il soit, va mettre un petit peu de temps avant de réagir. Ce temps mis par le circuit pour propager un changement sur les entrées vers la sortie s'appelle le temps de propagation. Pour faire simple, c'est le temps que met un circuit à faire ce qu'on lui demande : plus ce temps de propagation est élevé, plus le circuit est lent. Ce temps de propagation dépend de pas mal de paramètres, aussi je ne vais citer que les principaux.
Le temps de propagation des portes logiques
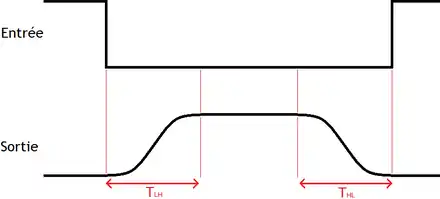
Une porte logique n'est pas un système parfait et reste soumis aux lois de la physique. Notamment, il n'a pas une évolution instantanée et met toujours un petit peu de temps avant de changer d'état. Quand un bit à l'entrée d'une porte logique change, elle met du temps avant de changer sa sortie. Ce temps de réaction pour propager un changement fait sur les entrées vers la sortie s'appelle le temps de propagation de la porte logique. Pour être plus précis, il existe deux temps de propagation : un temps pour passer la sortie de 0 à 1, et un temps pour la passer de 1 à 0. Les électroniciens utilisent souvent la moyenne entre ces deux temps de propagation, et la nomment le retard de propagation, noté .




Le chemin critique
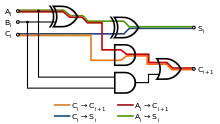
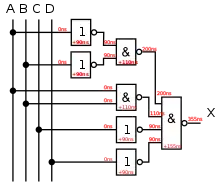
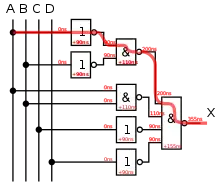
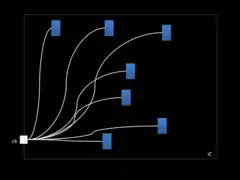
Si le temps de propagation de chaque porte logique a son importance, il faut aussi tenir compte de la manière dont elles sont reliées. La relation entre "temps de propagation d'un circuit" et "temps de propagation de ses portes" n'est pas simple. Deux paramètres vont venir jouer les troubles-fêtes : le chemin critique et la sortance des portes logiques. Commençons par voir le chemin critique, qui n'est autre que le nombre maximal de portes logiques entre une entrée et une sortie de notre circuit. Pour donner un exemple, nous allons prendre le schéma ci-contre. Pour ce circuit, le chemin critique est dessiné en rouge. En suivant ce chemin, on va traverser trois portes logiques, contre deux ou une dans les autres chemins.
Le temps de propagation total, lié au chemin critique, se calcule à partie de plusieurs paramètres. Premièrement, il faut déterminer quel est le temps de propagation pour chaque porte logique du circuit. En effet, chaque porte logique met un certain temps avant de fournir son résultat en sortie : quand les entrées sont modifiées, il faut un peu de temps pour que sa sortie change. Ensuite, pour chaque porte, il faut ajouter le temps de propagation des portes qui précédent. Si plusieurs portes sont reliées sur les entrées, on prend le temps le plus élevé. Enfin, il faut identifier le chemin critique, le plus long : le temps de propagation de ce chemin est le temps qui donne le tempo maximal du circuit.
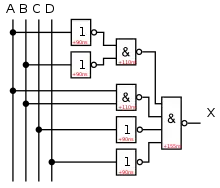 Temps de propagation par porte logique. |
 Temps de propagation pour chaque chemin. |
 Identification du chemin critique. |
La sortance des portes logiques
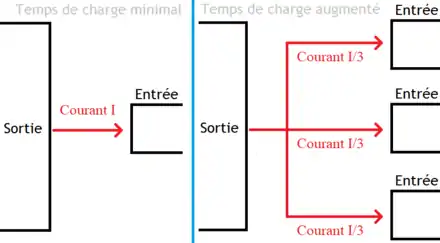
Passons maintenant au second paramètre lié à l'interconnexion entre portes logiques : la sortance. Dans les circuits complexes, il n'est pas rare que la sortie d'une porte logique soit reliée à plusieurs entrées (d'autre portes logiques). Le nombre d'entrées connectées à une sortie est appelé la sortance de la sortie. Il se trouve que plus on connecte de portes logiques sur une sortie, (plus sa sortance est élevée), plus il faudra du temps pour que la tension à l'entrée de ces portes passe de 1 à 0 (ou inversement). La raison en est que la porte logique fournit un courant fixe sur sa sortie, qui charge les entrées en tension électrique. Un courant positif assez fort charge les entrées à 1, alors qu'un courant nul ne charge pas les entrées qui retombent à 0. Avec plusieurs entrées, la répartition est approximativement équitable et chaque entrée reçoit seulement une partie du courant de sortie. Elles mettent plus de temps à se remplir de charges, ce qui fait que la tension met plus de temps à monter jusqu'à 1.
Le temps de latence des fils
Enfin, il faut tenir compte du temps de propagation dans les fils, celui mis par notre tension pour se propager dans les fils qui relient les portes logiques entre elles. Ce temps perdu dans les fils devient de plus en plus important au cours du temps, les transistors et portes logiques devenant de plus en plus rapides à force des les miniaturiser. Par exemple, si vous comptez créer un circuit avec des entrées de 256 à 512 bits, il vaut mieux le modifier pour minimiser le temps perdu dans les interconnexions que de diminuer le chemin critique.
Les circuits synchrones et asynchrones
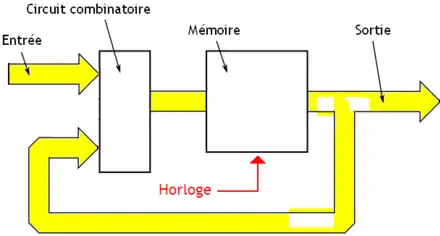
Ce temps de propagation doit être pris en compte quand on crée un circuit séquentiel : sans ça on ne sait pas quand mettre à jour la mémoire dans le circuit. Si on le fait trop tôt, le circuit combinatoire peut sauter des états : il se peut parfaitement qu'on change le bit placé sur l'entrée avant qu'il ne soit mémorisé. De plus, les différents circuits d'un composant électronique n'ont pas tous le même temps de propagation, et ceux-ci vont fonctionner à des vitesses différentes. Si l'on ne fait rien, on peut se retrouver avec des dysfonctionnements : par exemple, un circuit lent peut rater deux ou trois nombres envoyés par un composant un peu trop rapide.
Pour éviter les ennuis dus à l'existence de ce temps de propagation, il existe deux grandes solutions, qui permettent de faire la différence entre circuits asynchrones et synchrones. Les circuits asynchrones préviennent la mémoire quand ils veulent la mettre à jour. Quand le circuit combinatoire et la mémoire sont tous les deux prêts, on autorise l'écriture dans la mémoire. Mais ce n'est pas cette solution qui est utilisée dans les circuits de nos ordinateurs, qui sont des circuits synchrones. Dans les circuits synchrones, les registres sont tous mis à jour en même temps. On peut remarquer que c'est quelque chose d'analogue à ce qu'on trouve sur les registres : si toutes les bascules d'un registre doivent être mises à jour en même temps, tous les registres d'un circuit séquentiel doivent être mis à jour en même temps. La solution est donc similaire à celle utilisée sur les registres : on commande la mise à jour des registres par un signal d'autorisation d'écriture, qui est transmis à tous les registres en même temps.
Les circuits synchrones
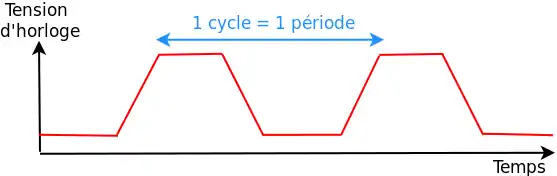
Généralement, ces circuits mettent à jour leurs mémoires à intervalles réguliers. La durée entre deux mises à jour est constante et doit être plus grande que le temps de propagation le plus long du circuit : on se cale donc sur le circuit combinatoire le plus lent. Les concepteurs d'un circuit doivent estimer le pire temps de propagation possible pour le circuit et ajouter une marge de sûreté. Pour mettre à jour nos circuits à intervalles réguliers, le signal d'autorisation d'écriture est une tension qui varie de façon cyclique : on parle alors de signal d'horloge. Le temps que met la tension pour effectuer un cycle est ce qu'on appelle la période. Le nombre de périodes par seconde est appelé la fréquence. Elle se mesure en hertz. On voit sur ce schéma que la tension ne peut pas varier instantanément : elle met un certain temps pour passer de 0 à 1 et de 1 à 0. On appelle cela un front. La passage de 0 à 1 est appelé un front montant et le passage de 1 à 0 un front descendant.
En faisant cela, notre circuit logique mettra ses sorties à jour lors d'un front montant (ou descendant) sur son entrée d'horloge. Entre deux fronts montants (ou descendants), le circuit ne réagit pas aux variations des entrées. Évidemment, l’horloge est envoyée au circuit via une entrée spéciale : l'entrée d'horloge.
La distribution de l'horloge dans un circuit complexe
Dans le cas où le circuit est composé de plusieurs sous-circuits devant être synchronisés via l’horloge, celle-ci est distribuée à tous les sous-circuits à travers un réseau de connexions électriques qu'on appelle l'arbre d'horloge. L'arbre d'horloge le plus simple, illustré dans la première image ci-dessous, relie directement l'horloge à tous les composants à cadencer. Un problème avec cette approche est la sortance de l'horloge. Cette dernière est connectée à trop de composants, ce qui la ralentit. Pour éviter tout problème, on peut ajouter des buffers, de petits répéteurs de signal. S'ils sont bien placés, ils réduisent la sortance nécessaire et empêchent que le signal de l'horloge s'atténue en parcourant les fils.
 Arbre d’horloge simple. |
 Arbre d'horloge avec des buffers (les triangles sur le schémas). |
Un autre problème peut survenir : les fils qui transmettent l’horloge ont chacun des délais de transmission différents. Une des raisons à cela est qu'ils n'ont pas la même longueur, ce qui fait que l'électricité met plus de temps à traverser les quelques micromètres de différence entre fils, mais ce n'est pas la seule raison. Les composants sont temporellement décalés les uns d'avec les autres, même si ce n'est que légèrement. Ce phénomène est appelé le décalage d'horloge, traduction du terme clock skew utilisé en langue anglaise. Il ne pose pas de problème à faible fréquence et/ou pour des fils assez courts, mais c'est autre chose pour les circuits à haute fréquence. Pour éviter les effets néfastes du clock skew sur les circuits haute-fréquence, on doit concevoir l'arbre d'horloge avec des techniques assez complexes.
Par exemple, on peut jouer sur la forme de l'arbre d'horloge. Dans les schémas du dessus, l'arbre d'horloge part d'un côté du processeur, de là où se trouve la broche pour l'horloge. En faisant cela, un côté du processeur recevra l'horloge avant l'autre, entraînant l'apparition d'un délai entre la gauche du processeur et sa droite. Pour éviter cela, on peut faire partir l'horloge du centre du processeur. Le fil de l'horloge part de la broche d'horloge, va jusqu’au centre du processeur, puis se ramifie de plus en plus en direction des composants. En faisant cela, on garantit que les délais sont équilibrés entre les deux côtés du processeur. Cependant, il existera quand même un délai entre les composants proches du centre et ceux sur les bords du processeur. Mais le délai maximal est minimisé, divisé par deux. Entre un délai proportionnel à la largeur du processeur, et un délai proportionnel à la distance maximale centre-bord (environ la moitié de la diagonale), le second est plus faible.
Il arrive que le clock skew soit utilisé volontairement pour compenser d'autres délais de transmission. Pour comprendre pourquoi, imaginons que deux registres soient reliés l'un avec l'autre, le premier envoyant ses données au second. Il y a évidemment un petit délai de transmission entre les deux registres. Mais sans clock skew, les deux composants recevront l'horloge en même temps : le registre receveur captera un front montant de l'horloge avant les données de l'émetteur. En théorie, on devrait cadencer l'horloge de manière à ce que ce délai inter-registres ne pose pas de problème. Mais cela n'est pas forcément la meilleure solution si on veut fabriquer un circuit à haute fréquence. Pour éviter cela, on peut ajouter un clock skew, qui retardera l’horloge du registre receveur. Si le clock skew est supérieur ou égal au temps de transmission inter-registres, alors le registre receveur réceptionnera bien le signal de l'horloge après les données envoyées par le registre émetteur. On peut ainsi conserver un fonctionnement à haute fréquence, sans que les délais de transmission de données ne posent problème.

Plusieurs horloges dans un ordinateur
Dans un ordinateur moderne, chaque composant d'un ordinateur a sa propre horloge, qui peut être plus ou moins rapide que les autres : par exemple, notre processeur fonctionne avec une horloge différente de l'horloge de la mémoire ! La présence de plusieurs horloges vient du fait que certains composants informatiques sont plus lents que d'autres. Plutôt que de caler tous les composants d'un ordinateur sur le plus lent en utilisant une seule horloge, il vaut mieux utiliser une horloge différente pour chaque composant : les mises à jour de registres sont synchronisées à l'intérieur d'un composant (dans un processeur, ou une mémoire), alors que les composants eux-mêmes synchronisent leurs communications avec d'autres mécanismes. Ces multiples signaux d'horloge dérivent d'une horloge de base qui est « transformée » en plusieurs horloges, grâce à des montages électroniques spécialisés (des PLL ou des montages à portes logiques un peu particuliers).
Les circuits asynchrones
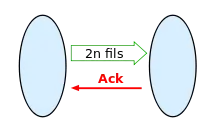
Les circuits asynchrones n'utilisent pas d'horloge pour synchroniser leurs composants/sous-circuits. L’asynchrone permet à deux circuits/composants de se synchroniser, l'un des deux étant un émetteur, l'autre étant un récepteur. Pour se synchroniser, l’émetteur indique au récepteur qu'il lui a envoyé une donnée. Le récepteur réceptionne alors la donnée et indique qu'il a pris en compte les données envoyées. Cette synchronisation se fait grâce à des fils spécialisés du bus de commande, qui transmettent des bits particuliers.
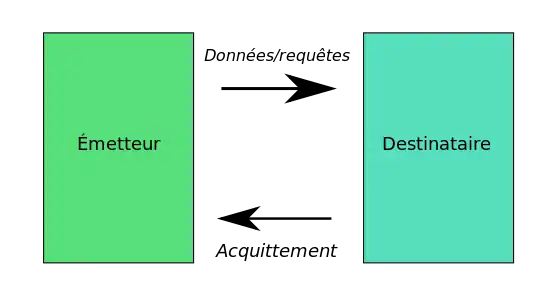
Généralement, cette synchronisation utilise deux fils : REQ et ACK (des mots anglais request =demande et acknowledg(e)ment =accusé de réception). Le fil REQ indique au récepteur que l'émetteur lui a envoyé une donnée, tandis que le fil ACK indique que le récepteur a fini son travail et accepte la donnée indiquée par REQ. Lorsqu'un composant veut envoyer une information à un autre, celui-ci place le fil REQ à 1, afin de dire au récepteur : « attention, j'ai besoin que tu me fasses quelque chose ». Le récepteur va alors réagir et va faire ce qu'on lui a demandé. Une fois qu'il a terminé, il va alors positionner le fil ACK à 1 histoire de dire : j'ai terminé ! Plus rarement, un seul fil est utilisé à la fois pour la requête et l'acquittement : un 1 sur ce fil signifie qu'une requête est en attente (le second composant est occupé), tandis qu'un 0 indique que le second composant est libre. Ce fil est manipulé aussi bien par l'émetteur que par le récepteur. L'émetteur met ce fil à 1 pour envoyer une donnée, le récepteur le remet à 0 une fois qu'il est libre. Cette méthode s'appelle le codage simple-track.
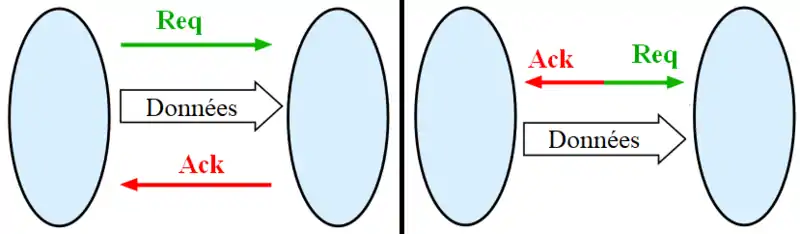
Habituellement, les circuits asynchrones utilisent un fil par bit de données, le signal REQ étant envoyé sur un seul fil. Mais cette manière de faire a quelques défauts, le principal étant la sensibilité aux délais. Pour faire simple, la conception du circuit doit prendre en compte le temps de propagation dans les fils : il faut garantir que le signal REQ arrive au second circuit après les données, ce qui est loin d'être trivial. Pour éviter cela, d'autres circuits utilisent plusieurs fils pour coder un seul bit, la majorité utilisant deux fils par bit. Cette méthode s'appelle le codage dual-rail.
Il en existe plusieurs sous-types, qui différent selon ce qu'on envoie sur les deux fils qui codent un bit.
- Certains circuits asynchrones utilisent un signal REQ par bit, d'où la présence de deux fils par bit : un pour le bit de données, et l'autre pour le signal REQ.
- D'autres codent un bit de données sur deux bits, certaines valeurs indiquant un bit invalide.
Les bascules synchrones
Utiliser une horloge demande cependant d'adapter les circuits vus précédemment, les bascules devant être modifiées. En effet, les bascules précédentes sont mises à jour quand un signal d'autorisation est mis à 1. Mais avec un signal d'horloge, les bascules doivent être mises à jour lors d'un front (montant ou descendant, peu importe) : seul un front peut ainsi commander la mise à jour de l'état du circuit, à savoir du contenu de ses bascules. L'horloge est reliée aux bascules du circuit, toutes les bascules ayant une entrée d'autorisation d'écriture modifiée.
_Symbol.svg.png.webp)
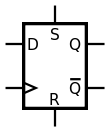
Commençons par voir la bascule D, modifiée de manière à mettre à jour son contenu sur un front (montant). Celle-ci possède deux entrées : une entrée D sur laquelle on envoie la donnée à mémoriser (entrée d'écriture), et une autre sur laquelle on envoie l'horloge. Elle contient entre une et deux sorties : une pour la donnée mémorisée (sortie de lecture) et éventuellement une autre pour son opposé. Son fonctionnement est simple : son contenu est mis à jour avec ce qu'il y a sur l'entrée D, mais seulement lors d'un front montant (quelques bascules effectuent cependant la mise à jour non sur front montant, mais sur front descendant). Plus rares, certaines bascules D contiennent des entrées R et S pour les mettre à zéro ou à 1. La plupart des bascules D ont une entrée R pour les remettre à zéro, tandis que l'entrée S est absente, celle-ci étant peu utile.
| Entrée CLK | Entrée D | Sortie Q |
|---|---|---|
| Front montant (ou descendant, suivant la bascule) | 0 | 0 |
| 0 | 1 | 1 |
| Pas de front montant | 0 ou 1 | Pas de changement |
Bascule synchrone fabriquée avec des transistors
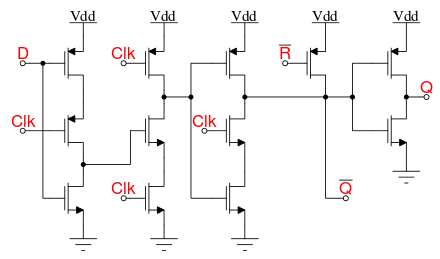
Il existe de nombreuses manières de créer une telle bascule, aussi allons-nous nous contenter des plus fréquentes et des plus simples. Le cas le plus complexe est celui où la bascule est intégralement réalisée avec des transistors. Nous n'étudierons pas ce cas, qui est franchement compliqué et relève plus de l'état de l'art que d’autre chose. Tout au plus, nous pouvons nous contenter de vous donner le circuit obtenu, pour le plaisir de vos yeux.
Bascule synchrone fabriquée avec des bascules RS
Il existe cependant des bascules D commandées sur front qui sont conçues intégralement avec des portes logiques. Plus précisément, ces bascules sont construites à partir d'un assemblage de portes logiques et de bascules plus élémentaires (des bascules RS ou D telles que vues plus haut).
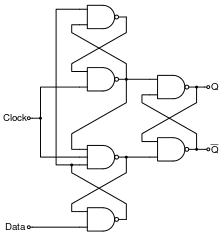
La première méthode pour concevoir de telles bascules est illustrée ci-contre. Elle associe trois bascules RS normales, les deux premières formant une couche d'entrée qui commande la troisième bascule. Ces deux bascules d'entrée vont en quelque sorte traiter le signal à envoyer à la troisième bascule. Quand le signal d'horloge est à 0, les deux bascules d'entrée fournissent un 1 sur leur sortie : la troisième bascule reste donc dans son état précédent, sans aucune modification. Quand l'horloge passe à 1 (front montant), seule une des deux bascules va fournir un 1 en sortie, l'autre voyant sa sortie passer à 0. La bascule en question dépend de la valeur de D : un 0 sur l'entrée D force l'entrée R de la troisième bascule, un 1 forçant l'entrée S. Dit autrement, le contenu de la troisième bascule est mis à jour. Quand l'entrée d'horloge passe à 1, les bascules se figent toutes dans leur état précédent. Ainsi, la troisième bascule reste commandée par les deux bascules précédentes, qui maintiennent son contenu (les entrées R et S restent à leur valeur obtenue lors du front montant).
Bascule synchrone fabriquée avec des bascules D
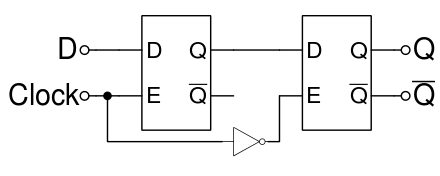
Une autre solution consiste à placer deux bascules D l'une à la suite de l'autre, en inversant leur signal d'autorisation d'écriture. Avec cette méthode, la première bascule est mise à jour quand l’horloge est à 0, la seconde étant mise à jour avec le contenu de la première quand l'horloge est à 1. Dans ces conditions, la sortie finale de la bascule est mise à jour après un front montant.